目录
- [1. 准备](#1. 准备)
-
- [1.1 安装依赖](#1.1 安装依赖)
- [1.2 安装 Isaac Gym](#1.2 安装 Isaac Gym)
- [1.3 安装 urdfpy](#1.3 安装 urdfpy)
- [2. 安装 Aerial Gym Simulator](#2. 安装 Aerial Gym Simulator)
-
- [1.1 下载源码](#1.1 下载源码)
- [1.2 编译](#1.2 编译)
- [1.3 测试](#1.3 测试)
- 参考
前言: Aerial Gym Simulator 是一个基于 NVIDIA Isaac Gym,用于训练微型飞行器(MAV)平台,如多旋翼飞行器,使其学会利用基于学习的方法在杂乱的环境中飞行和导航。配置有相机、雷达等多种传感器,具备高自由度自定义仿真场景和任务的能力。
环境:Ubuntu 20.04,NVIDIA RTX 3060。
由于需要使用
cuda,虚拟机不能用显卡,所以此仿真平台不支持虚拟机。
1. 准备
安装 Aerial Gym Simulator 之前必须安装好 conda
1.1 安装依赖
- 创建
conda虚拟环境
bash
conda create -n aerialgym python=3.8 # 创建- 安装依赖
bash
conda activate aerialgym # 激活
conda install pyyaml==6.0 tensorboard==2.13.0 -c conda-forge -c pytorch -c defaults -c nvidia
# 可使用其他版本的 pytorch 和 cuda
conda install pytorch==2.3.0 torchvision==0.18.0 torchaudio==2.3.0 pytorch-cuda=11.8 -c pytorch -c nvidia
conda install -c fvcore -c iopath -c conda-forge fvcore iopath
conda install pytorch3d1.2 安装 Isaac Gym
点击链接,进入下载界面 Isaac Gym - Download Archive | NVIDIA Developer
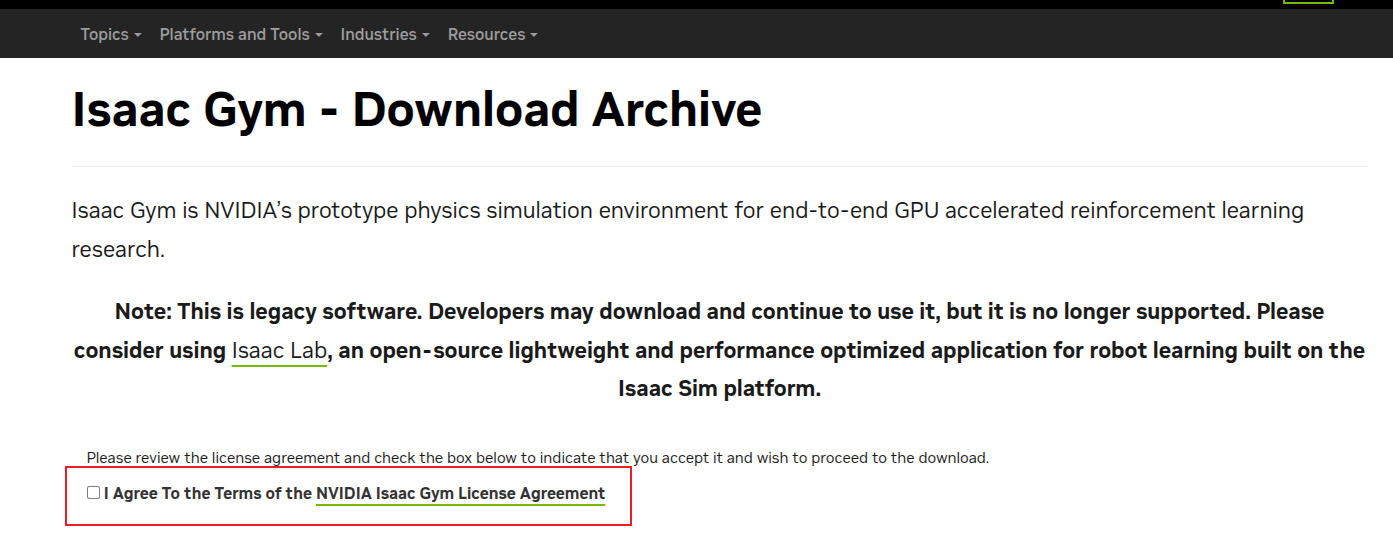
勾选框,会出现下载按扭
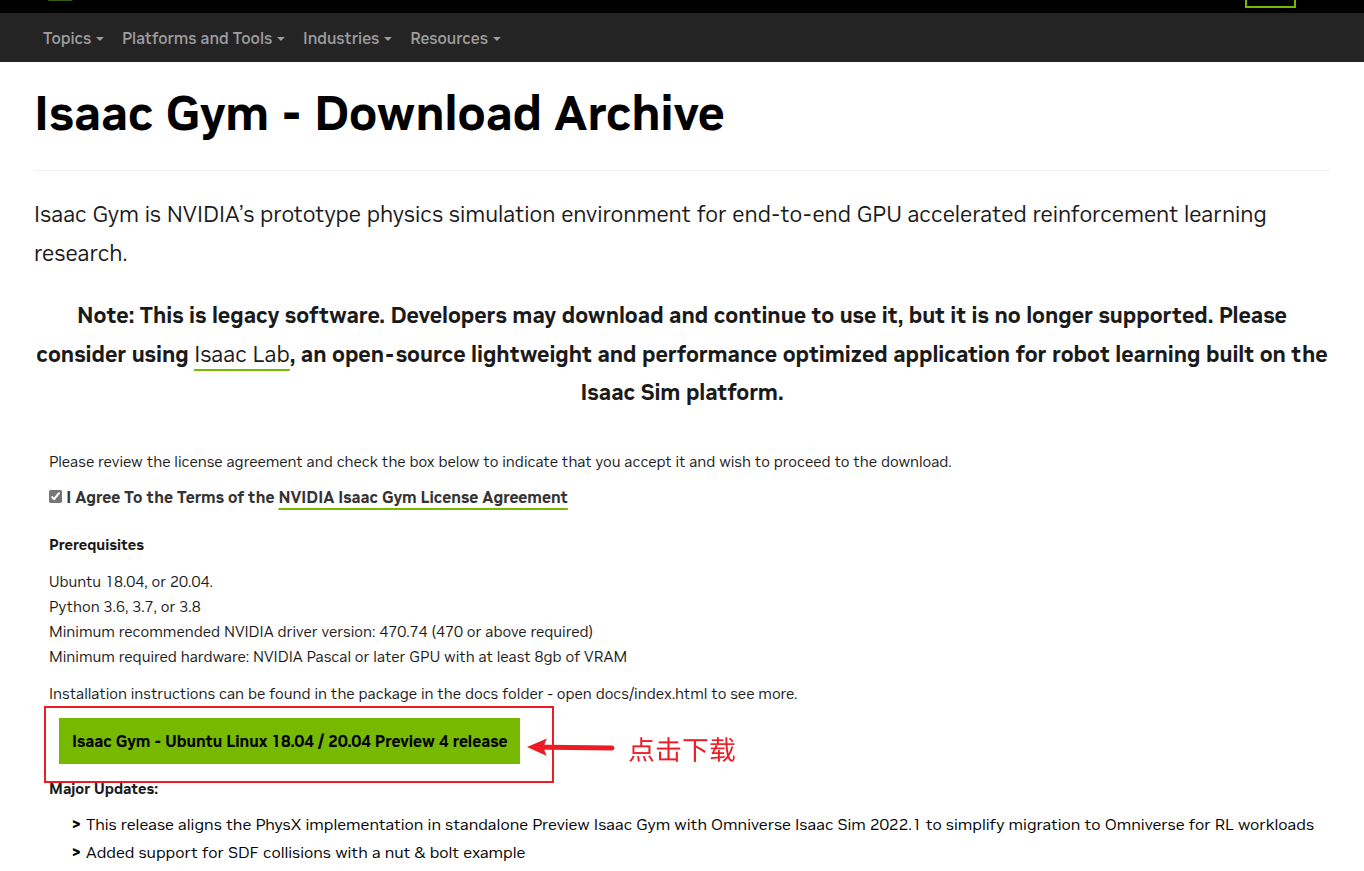
- 下载完成后,解压压缩包,然后进行安装。<isaacgym_folder> 指代Isaac Gym路径,必须根据你得实际路径修改,不然会报错
bash
conda activate aerialgym # 激活
cd <isaacgym_folder>/python
pip3 install -e . # 安装注:如果出现 "rgbImage buffer error 999" 的报错信息,设置环境变量
bashecho "export VK_ICD_FILENAMES=/usr/share/vulkan/icd.d/nvidia_icd.json" >> ~/.bashrc
- 安装成功后设置环境变量。<Your_Conda_Path> 指代Conda路径,根据你得实际路径修改,不然会报错
bash
export LD_LIBRARY_PATH=<Your_Conda_Path>/envs/aerialgym/lib- 测试 Isaac Gym
bash
cd <isaacgym_folder>/python/examples
python3 1080_balls_of_solitude.py
# 如果运行成功,代表Isaac Gym 安装成功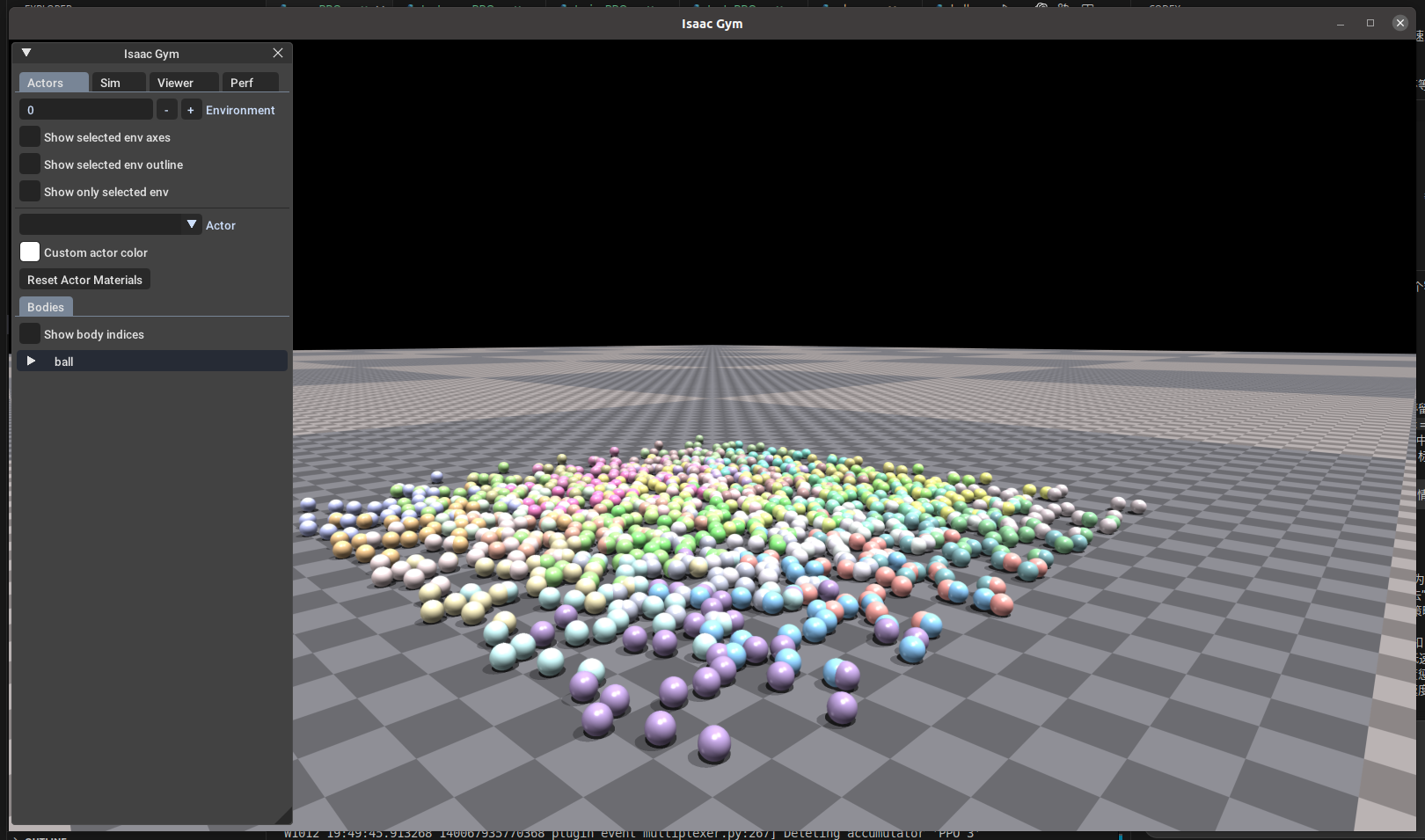
- 修改文件
bash
gedit <isaacgym_folder>/python/isaacgym/gymutil.py修改 337 行,将
python
args = parser.parse_args()改为
python
args, _ = parser.parse_known_args()1.3 安装 urdfpy
bash
conda activate aerialgym # 激活
mkdir ~/aerial_gym_ws && cd ~/aerial_gym_ws
git clone https://github.com/mmatl/urdfpy.git
cd urdfpy
pip3 install -e . # 安装2. 安装 Aerial Gym Simulator
1.1 下载源码
bash
cd ~/aerial_gym_ws
git clone https://github.com/ntnu-arl/aerial_gym_simulator.git1.2 编译
bash
conda activate aerialgym # 激活
cd ~/aerial_gym_ws/aerial_gym_simulator
pip3 install -e .1.3 测试
bash
conda activate aerialgym # 激活
export LD_LIBRARY_PATH=<Your_Conda_Path>/envs/aerialgym/lib
cd ~/aerial_gym_ws/aerial_gym_simulator/aerial_gym/examples
python3 position_control_example.py效果跟下图类似
这些是仿真器定义的快捷键
更多案例请看官方文档 👇
Getting Started - Aerial Gym Simulator
参考
Github: Aerial Gym Simulator - Isaac Gym Simulator for Aerial Robots
如有其他问题,或者发现文章有错误,请在评论区留言,或加入 QQ群(961297255) 交流
Keep learning!