解析Linux实时调度的核心机制、优先级管理及两种调度策略的实现差异
一、实时调度的本质:确定性与低延迟
实时系统与普通系统的核心区别在于对响应时间的确定性要求。在工业控制、自动驾驶、机器人等场景中,任务必须在严格的时间窗口内完成,否则可能导致严重后果。Linux通过实时调度器(RT Scheduler)提供这种能力,其核心目标是:
- 确保高优先级实时任务优先获得CPU资源
- 提供可预测的任务响应时间
- 避免低优先级任务干扰高优先级任务
Linux实时调度器支持两种主要策略(定义于sched.h):
- SCHED_FIFO(先进先出实时调度):同优先级任务按顺序执行,高优先级任务可抢占,任务一旦获得CPU将一直运行直到主动放弃或被更高优先级任务抢占
- SCHED_RR(时间片轮转实时调度):在SCHED_FIFO基础上为同优先级任务分配时间片,时间片耗尽后任务被放到队列末尾,确保同优先级任务公平轮转
与CFS的根本区别:实时调度器采用"优先级驱动"的抢占式调度,高优先级任务可无条件抢占低优先级任务(包括CFS管理的普通任务);而CFS追求的是"比例公平",不保证严格的响应时间。
二、实时优先级:严格的层级体系
Linux实时调度采用静态优先级机制,优先级范围为1(最低)到99(最高),数值越大优先级越高。这与普通进程的nice值(-20到19)形成鲜明对比:
- 实时进程优先级(1-99)> 普通进程优先级(100-139)
- 实时优先级具有严格的抢占关系:高优先级实时任务可立即抢占低优先级实时任务和普通任务
- 相同优先级的实时任务调度行为由具体策略(FIFO/RR)决定
2.1 优先级的内核表示
实时优先级存储在进程描述符task_struct中,核心成员包括:
struct task_struct {
// ... 其他成员 ...
int prio; // 当前有效优先级(实时优先级直接使用)
int static_prio; // 静态优先级(实时进程等于rt_priority)
unsigned int rt_priority; // 实时优先级(1-99,0表示非实时进程)
const struct sched_class *sched_class; // 调度类(rt_sched_class)
struct sched_rt_entity rt; // 实时调度实体
// ... 其他成员 ...
};实时进程的sched_class指向rt_sched_class,使内核将其交给实时调度器管理。
2.2 优先级与调度类的映射
Linux内核通过"调度类"机制实现多调度策略共存,实时调度器对应rt_sched_class,其优先级高于普通进程的fair_sched_class:
// 调度类优先级顺序(include/linux/sched.h)
extern const struct sched_class stop_sched_class; // 最高(用于停止CPU)
extern const struct sched_class rt_sched_class; // 实时调度类
extern const struct sched_class fair_sched_class; // CFS调度类
extern const struct sched_class idle_sched_class; // 最低(空闲进程)调度时,内核按上述顺序检查各调度类,优先选择高优先级调度类中的就绪任务。
Linux调度类优先级层级stop_sched_classrt_sched_class (SCHED_FIFO/SCHED_RR)fair_sched_class (CFS)idle_sched_class最高优先级最低优先级
三、实时调度核心数据结构
实时调度器通过两个核心数据结构管理实时任务:sched_rt_entity(实时调度实体)和rt_rq(实时就绪队列)。
3.1 sched_rt_entity:实时任务的抽象
每个实时进程被抽象为sched_rt_entity,记录调度相关信息:
struct sched_rt_entity {
struct list_head run_list; // 就绪队列链表节点
unsigned long timeout; // 超时时间(用于SCHED_RR时间片)
unsigned int time_slice; // 剩余时间片(SCHED_RR专用)
int prio; // 实时优先级
// ... 其他辅助成员 ...
};关键成员解析:
run_list:用于将实体链接到对应优先级的就绪队列time_slice:SCHED_RR任务的剩余时间片,默认值为DEF_TIMESLICE(100ms)timeout:记录时间片到期时间,用于触发时间片轮转
3.2 rt_rq:实时就绪队列的管理中枢
rt_rq管理特定CPU上的实时任务,按优先级组织:
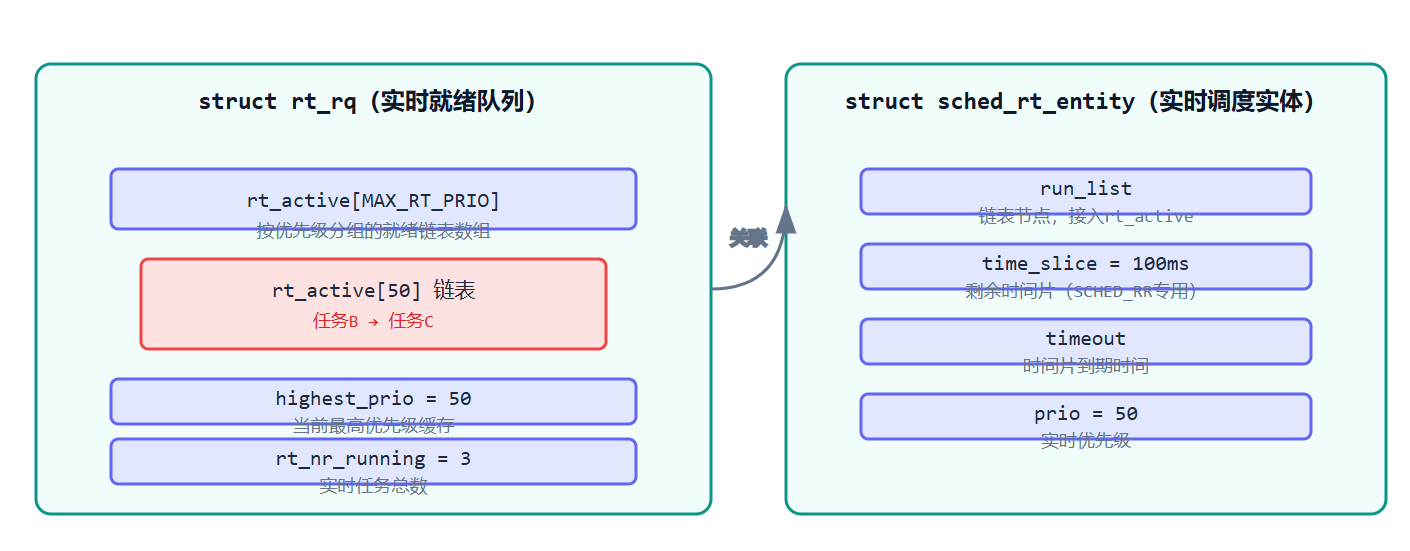
struct rt_rq {
struct list_head rt_active[MAX_RT_PRIO]; // 按优先级分组的就绪队列
unsigned int rt_nr_running; // 运行中的实时任务数量
unsigned int highest_prio; // 当前最高优先级
// ... 其他辅助成员 ...
};核心特性:
rt_active:数组大小为MAX_RT_PRIO(100),每个元素是对应优先级(0-99)的就绪任务链表highest_prio:缓存当前最高优先级,避免每次调度时从0到99遍历查找rt_nr_running:记录实时任务总数,用于快速判断是否有实时任务需要调度
示例:rt_rq的结构与任务组织
假设有三个实时任务:A(优先级30,SCHED_FIFO)、B(优先级50,SCHED_RR)、C(优先级50,SCHED_RR),其在rt_rq中的组织方式如下:
struct rt_rq {
rt_active = [
// 0-29: 空链表
30: [A], // 优先级30的就绪队列(仅任务A)
// 31-49: 空链表
50: [B -> C], // 优先级50的就绪队列(B和C按顺序排列)
// 51-99: 空链表
],
highest_prio = 50, // 当前最高优先级为50
rt_nr_running = 3 // 共3个实时任务
}调度时,实时调度器会先处理优先级50的任务(B和C),再处理优先级30的任务A,体现了"优先级驱动"的核心原则。
四、SCHED_FIFO策略:先到先服务的实时调度
SCHED_FIFO(First-In-First-Out)是最简单的实时调度策略,其核心规则可概括为:
- 相同优先级的任务按就绪顺序排队,先就绪的任务先执行
- 任务一旦获得CPU,将持续运行直到以下情况之一发生:
- 主动放弃CPU(如调用
sched_yield()或阻塞) - 被更高优先级的实时任务抢占
- 任务终止
- 主动放弃CPU(如调用
- 低优先级FIFO任务不能抢占高优先级FIFO任务
4.1 SCHED_FIFO的调度流程
SCHED_FIFO的核心调度逻辑在rt_sched_class的pick_next_task和enqueue_task方法中实现:
4.1.1 任务入队(enqueue_task_rt)
static void enqueue_task_rt(struct rq *rq, struct task_struct *p, int wakeup) {
struct sched_rt_entity *rt_se = &p->rt;
struct rt_rq *rt_rq = rt_rq_of_se(rt_se);
int prio = p->prio;
// 1. 将任务添加到对应优先级的就绪队列尾部
list_add_tail(&rt_se->run_list, &rt_rq->rt_active[prio]);
// 2. 更新最高优先级缓存
if (prio < rt_rq->highest_prio) {
rt_rq->highest_prio = prio;
}
// 3. 增加实时任务计数
rt_rq->rt_nr_running++;
}注:Linux内核中优先级数值越小表示优先级越高(与用户空间感知相反),因此prio < rt_rq->highest_prio表示新任务优先级更高。
4.1.2 选择下一个任务(pick_next_task_rt)
static struct task_struct *pick_next_task_rt(struct rq *rq) {
struct rt_rq *rt_rq = &rq->rt;
struct sched_rt_entity *rt_se;
struct task_struct *p;
int prio;
// 1. 从最高优先级开始查找就绪任务
for (prio = rt_rq->highest_prio; prio < MAX_RT_PRIO; prio++) {
if (!list_empty(&rt_rq->rt_active[prio])) {
// 2. 取队列头部任务
rt_se = list_first_entry(&rt_rq->rt_active[prio],
struct sched_rt_entity, run_list);
p = task_of(rt_se);
// 3. 标记为当前运行任务
rt_rq->curr = rt_se;
return p;
}
}
return NULL; // 无实时任务就绪
}4.2 SCHED_FIFO的抢占机制
当高优先级实时任务就绪时,内核会立即触发抢占。核心逻辑在try_to_wake_up中:
static int try_to_wake_up(struct task_struct *p, unsigned int state, int wake_flags) {
// ... 其他逻辑 ...
// 如果被唤醒任务是实时任务且优先级高于当前任务
if (p->sched_class == &rt_sched_class &&
p->prio < current->prio) {
// 触发立即抢占
resched_curr(rq);
}
// ... 其他逻辑 ...
}这种即时抢占确保高优先级实时任务的响应延迟最小化。
示例:SCHED_FIFO任务调度时序
假设有三个FIFO任务:T1(优先级80)、T2(优先级90)、T3(优先级80),调度过程如下:
- 初始状态:T1正在运行,T2和T3阻塞
- t=10ms:T2被唤醒(优先级90 > T1的80),立即抢占T1,T2开始运行
- t=20ms:T3被唤醒(优先级80 < T2的90),加入优先级80的就绪队列,不触发抢占
- t=50ms:T2完成任务退出,调度器选择优先级80队列的T1继续运行
- t=70ms :T1主动调用
sched_yield(),放弃CPU,T3从就绪队列头部取出并运行
时序表明:高优先级任务可立即抢占低优先级任务;同优先级任务按就绪顺序执行,需等待前序任务主动释放CPU。
五、SCHED_RR策略:时间片轮转的实时调度
SCHED_RR(Round-Robin)是对SCHED_FIFO的扩展,为相同优先级的任务引入时间片机制,解决了FIFO中同优先级任务可能饿死的问题。其核心规则是:
- 同优先级任务轮流执行,每个任务拥有固定时间片(默认100ms)
- 时间片耗尽时,任务被移至就绪队列尾部,等待下一轮调度
- 高优先级任务仍可随时抢占RR任务,行为与FIFO一致
5.1 SCHED_RR与SCHED_FIFO的核心差异
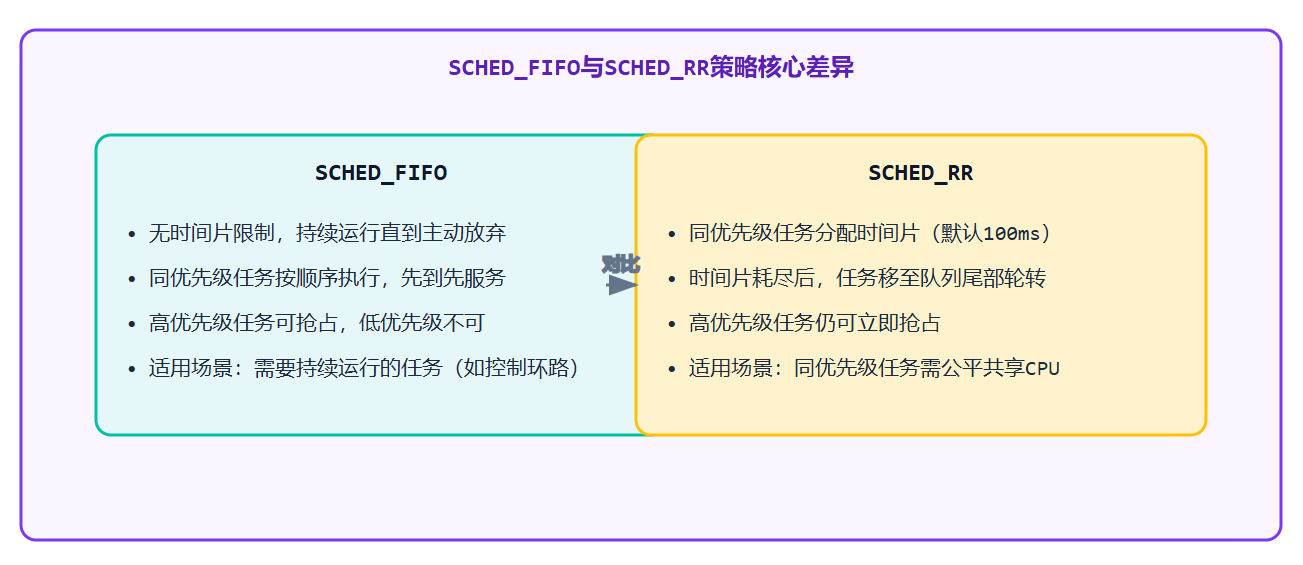
| 特性 | SCHED_FIFO | SCHED_RR |
|---|---|---|
| 时间片 | 无时间片限制,持续运行直到主动放弃 | 有时间片(默认100ms),超时后轮换 |
| 同优先级抢占 | 同优先级任务不能互相抢占 | 时间片耗尽后被同优先级任务抢占 |
| 适用场景 | 需要持续运行的任务(如控制环路) | 同优先级任务需公平共享CPU的场景 |
| 实现复杂度 | 简单(仅维护就绪队列) | 较复杂(需管理时间片和超时) |
5.2 SCHED_RR的时间片管理
RR任务的时间片管理是其与FIFO的核心区别,主要通过以下机制实现:
5.2.1 时间片初始化
任务创建或被唤醒时,初始化时间片:
static void sched_rt_init(struct task_struct *p) {
struct sched_rt_entity *rt_se = &p->rt;
// 非实时任务不初始化
if (!rt_prio(p->prio))
return;
// SCHED_RR任务初始化时间片(默认100ms)
if (p->policy == SCHED_RR) {
rt_se->time_slice = DEF_TIMESLICE;
} else {
rt_se->time_slice = 0; // FIFO任务无时间片
}
}5.2.2 时间片消耗与超时处理
内核定期(时钟中断)检查RR任务的时间片消耗:
static void update_curr_rt(struct rq *rq) {
struct rt_rq *rt_rq = &rq->rt;
struct sched_rt_entity *curr = rt_rq->curr;
u64 now = rq_clock(rq);
u64 delta = now - curr->start_time;
// 仅处理SCHED_RR任务
if (curr->time_slice && task_of(curr)->policy == SCHED_RR) {
// 消耗时间片(将纳秒转换为时间片单位)
curr->time_slice -= delta / NSEC_PER_MSEC;
// 时间片耗尽
if (curr->time_slice <= 0) {
// 重新设置时间片
curr->time_slice = DEF_TIMESLICE;
// 将任务移至就绪队列尾部
requeue_task_rt(rq, task_of(curr), 0);
// 触发重新调度
resched_curr(rq);
}
}
curr->start_time = now;
}5.2.3 时间片轮转的触发
时间片耗尽后,requeue_task_rt将任务移至队列尾部,实现轮转:
static void requeue_task_rt(struct rq *rq, struct task_struct *p, int head) {
struct sched_rt_entity *rt_se = &p->rt;
struct rt_rq *rt_rq = rt_rq_of_se(rt_se);
// 从当前队列移除
list_del(&rt_se->run_list);
// 添加到队列尾部(实现轮转)
list_add_tail(&rt_se->run_list, &rt_rq->rt_active[p->prio]);
}示例:SCHED_RR任务调度时序
假设有两个RR任务:R1(优先级70)、R2(优先级70),时间片100ms,调度过程如下:
- t=0ms:R1就绪并开始运行,时间片=100ms
- t=100ms:R1时间片耗尽,被移至就绪队列尾部,R2从队列头部取出并运行,时间片=100ms
- t=200ms:R2时间片耗尽,被移至就绪队列尾部,R1从队列头部取出并运行,时间片=100ms
- t=250ms:R1主动阻塞(等待IO),剩余时间片保留,R2开始运行
- t=300ms:R1被唤醒,加入就绪队列尾部,R2继续运行
- t=300ms:R2时间片耗尽,R1从队列头部取出并运行(使用剩余时间片50ms)
可见,RR策略通过时间片确保同优先级任务公平共享CPU,且任务阻塞时会保留剩余时间片。
六、实时调度的用户空间接口与实践
用户空间通过标准系统调用配置实时调度策略和优先级,核心接口包括sched_setscheduler()和sched_setparam()。
6.1 设置实时调度策略的代码示例
#include
#include
#include
#include
// 设置进程为SCHED_FIFO策略,优先级50
int set_fifo_scheduler(pid_t pid, int priority) {
struct sched_param param;
// 检查优先级范围(1-99)
if (priority < 1 || priority > 99) {
fprintf(stderr, "优先级必须在1-99之间\n");
return -1;
}
param.sched_priority = priority;
// 设置调度策略和参数
if (sched_setscheduler(pid, SCHED_FIFO, ¶m) == -1) {
perror("设置调度策略失败");
return -1;
}
printf("进程%d已设置为SCHED_FIFO,优先级%d\n", pid, priority);
return 0;
}
// 设置进程为SCHED_RR策略,优先级30
int set_rr_scheduler(pid_t pid, int priority) {
struct sched_param param;
if (priority < 1 || priority > 99) {
fprintf(stderr, "优先级必须在1-99之间\n");
return -1;
}
param.sched_priority = priority;
if (sched_setscheduler(pid, SCHED_RR, ¶m) == -1) {
perror("设置调度策略失败");
return -1;
}
printf("进程%d已设置为SCHED_RR,优先级%d\n", pid, priority);
return 0;
}
int main() {
// 设置当前进程为SCHED_FIFO,优先级50
set_fifo_scheduler(getpid(), 50);
// 业务逻辑...
while (1) {
// 实时任务处理
}
return 0;
}6.2 实时调度的权限与限制
使用实时调度策略需要注意:
-
权限要求 :非root用户需要
CAP_SYS_NICE能力才能设置实时优先级,可通过setcap命令赋予:sudo setcap cap_sys_nice+ep ./realtime_app -
CPU时间限制 :Linux通过
RLIMIT_RTTIME限制实时进程的CPU使用时间(默认无限制),防止实时任务独占CPU导致系统无响应 -
优先级反转 :低优先级实时任务持有高优先级任务需要的锁时,会导致高优先级任务阻塞。可通过
pthread_mutexattr_setprotocol设置优先级继承协议解决
6.3 实时调度的性能监测工具
-
chrt:命令行工具查看/设置实时调度策略# 查看进程1234的调度策略 chrt -p 1234 # 将进程1234设置为SCHED_RR,优先级50 chrt -r -p 50 1234 -
ps:查看进程优先级ps -eo comm,pid,pri,rtprio,sched | grep -E "COMMAND|my_realtime_app" -
trace-cmd:跟踪实时调度事件,分析调度延迟sudo trace-cmd record -e sched_switch sudo trace-cmd report
七、总结
Linux实时调度器通过SCHED_FIFO和SCHED_RR策略为实时应用提供了确定性的调度能力,其核心要点包括:
- 实时进程采用1-99的静态优先级体系,优先级高于普通进程,支持严格的抢占机制
- SCHED_FIFO策略适用于需要持续运行的任务,同优先级任务按顺序执行,无时间片限制
- SCHED_RR策略为同优先级任务引入时间片轮转,确保公平共享CPU资源
- 实时调度器通过
rt_rq按优先级组织就绪队列,通过sched_rt_entity跟踪任务状态 - 用户空间通过
sched_setscheduler()等接口配置实时调度参数,需注意权限和优先级反转问题
理解实时调度器的工作原理,对于开发工业控制、自动驾驶等对时间敏感的应用至关重要。在实际使用中,需根据任务特性选择合适的调度策略,并通过工具监测和优化实时性能。