目录
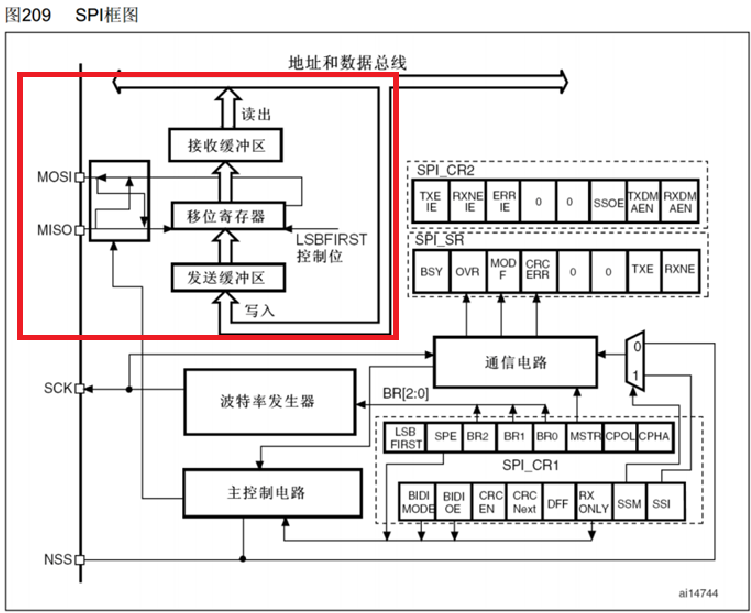
SPI核心部分(数据寄存器和移位寄存器结合工作,实现连续数据流)
第二步:复制软件SPI读写W25Q64代码,将底层代码MySPI修改为硬件触发(非连续传输)即可,其他模块无需更改
1.SPI外设简介
STM32内部集成了硬件SPI收发电路,可以由硬件自动执行时钟生成、数据收发等功能,减轻CPU的负担
可配置8位/16位数据帧(16位数据帧少用)、高位先行/低位先行(SPI基本都是高位先行)
时钟频率: f_PCLK / (2, 4, 8, 16, 32, 64, 128, 256)
支持多主机模型、主或从操作
可精简为半双工/单工通信
支持DMA
兼容I2S协议(音频传输协议)(手册有详细介绍)
STM32F103C8T6 硬件SPI资源:SPI1、SPI2
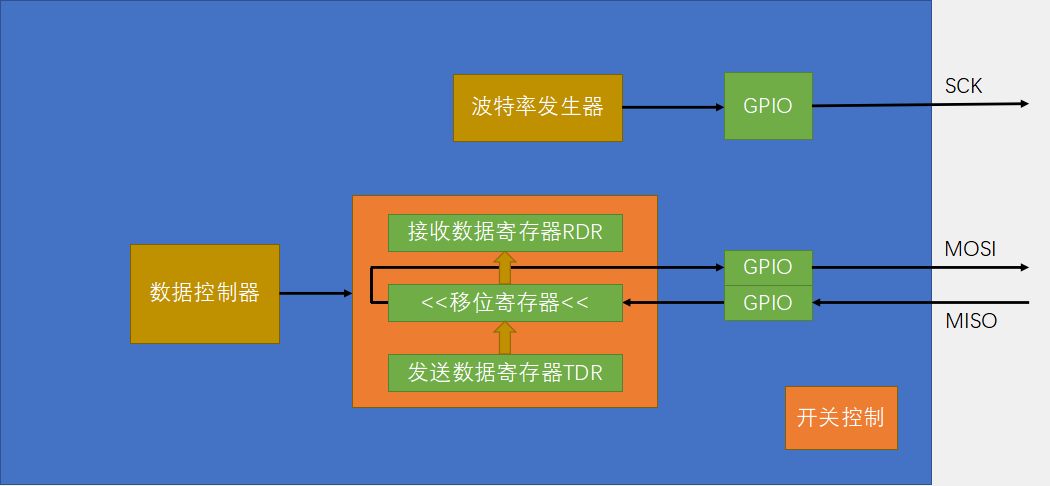
2.SPI框图
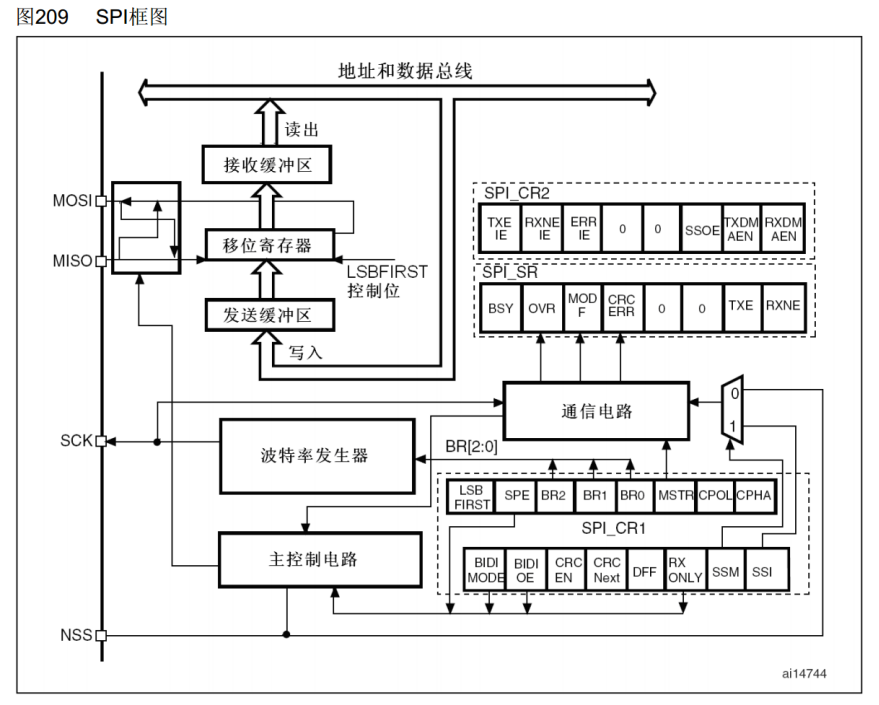
SPI核心部分(数据寄存器和移位寄存器结合工作,实现连续数据流)
LSBFIRST控制位:控制低位先行或者高位先行,给0高位先行,给1低位先行
接收缓冲区(RDR)和发送缓冲区(TDR),就是数据寄存器DR,占用同一个地址
写入数据先在TDR,然后到移位寄存器,移位寄存器在把接收到的数据,放在接收缓冲区里

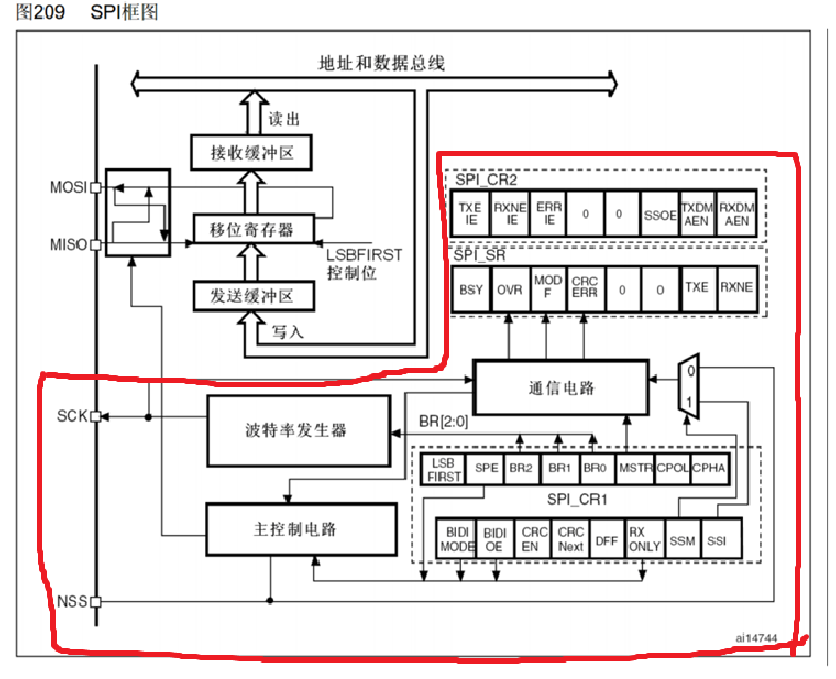
控制逻辑
波特率发生器:产生SCK时钟,内部主要就是一个分频器,输入时钟是PCLK,72MHz或36MHz,右边的寄存器通过BR0、BR1、BR2控制波特率发生器
寄存器SPE:SPI使能,就是SPI_Cmd函数配置的位
寄存器BR:配置波特率,就是SCK时钟频率
寄存器MSTR:配置主从模式,1是主模式,0是从模式
寄存器CPOL和CPHA:选择SPI的4种模式
状态寄存器TXE:发送寄存器空
状态寄存器RXNE:接受寄存器非空
其余的看手册

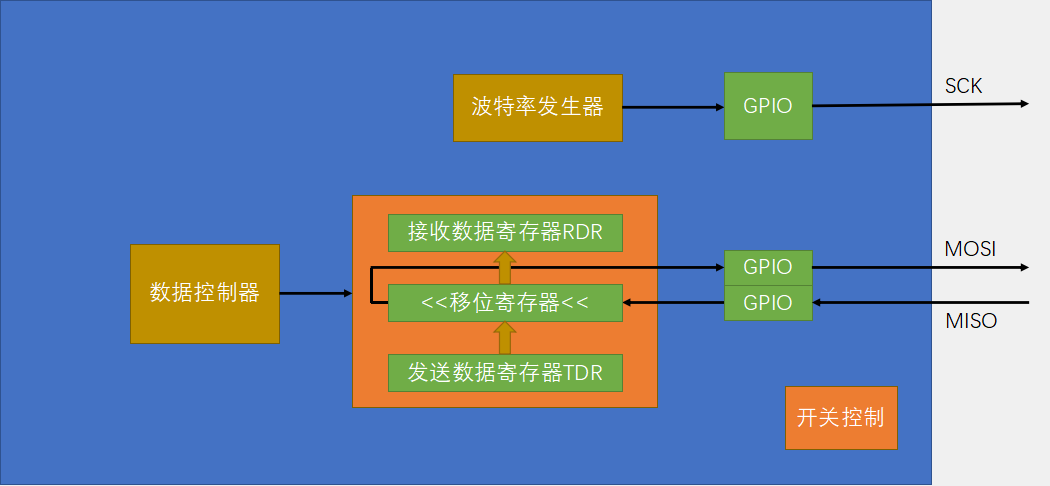
3.SPI基本结构
4.主模式全双工连续传输
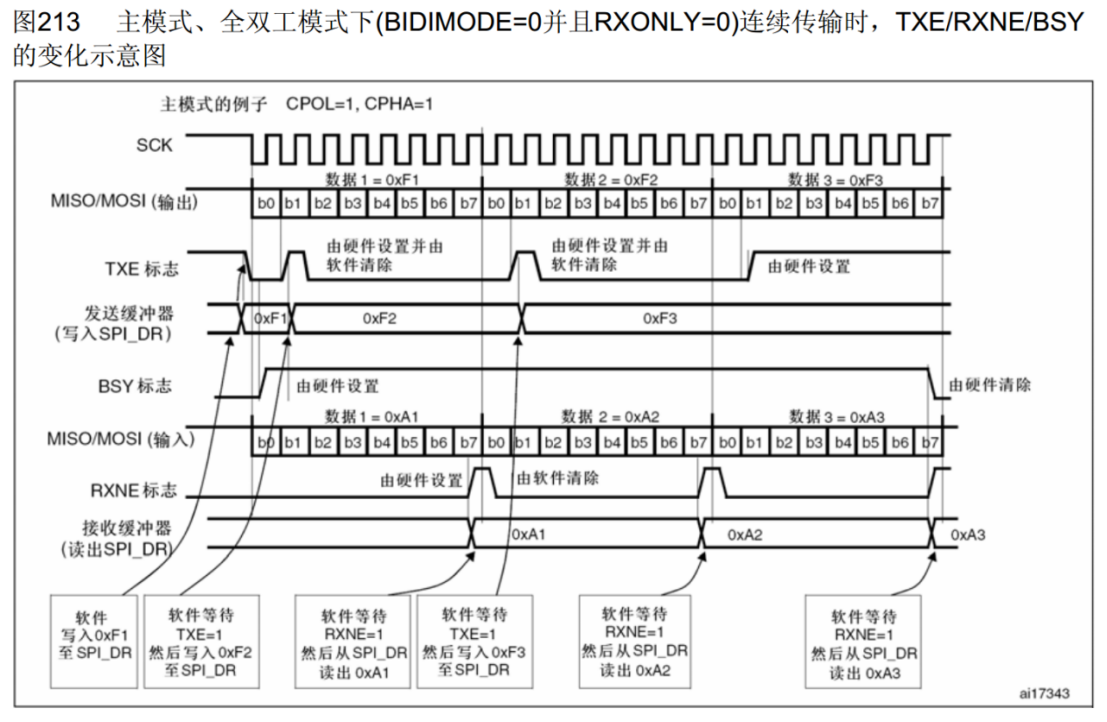
如果没有极致的追求,一般不使用
这个图使用了模式3演示
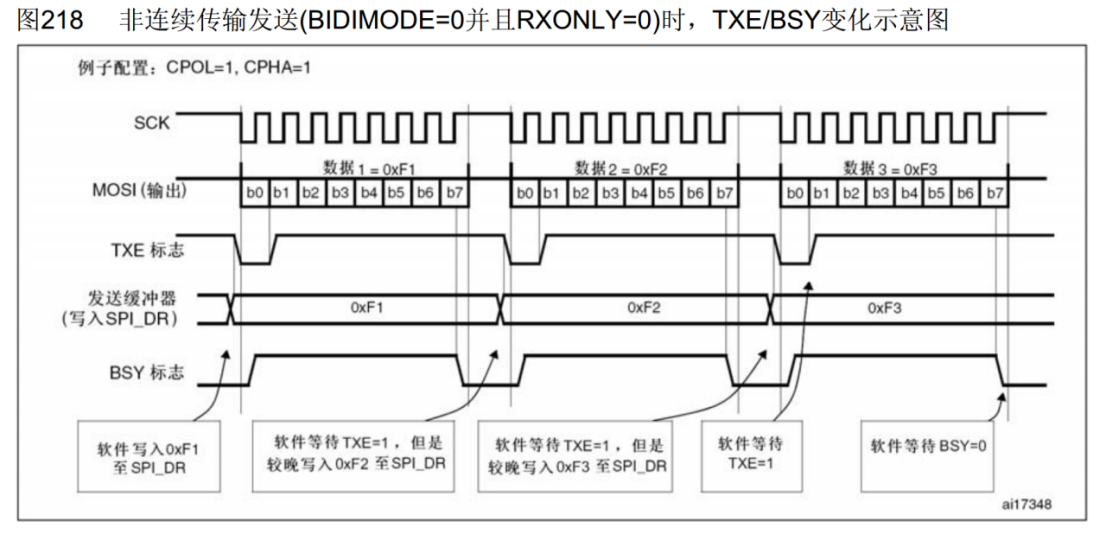
5.非连续传输
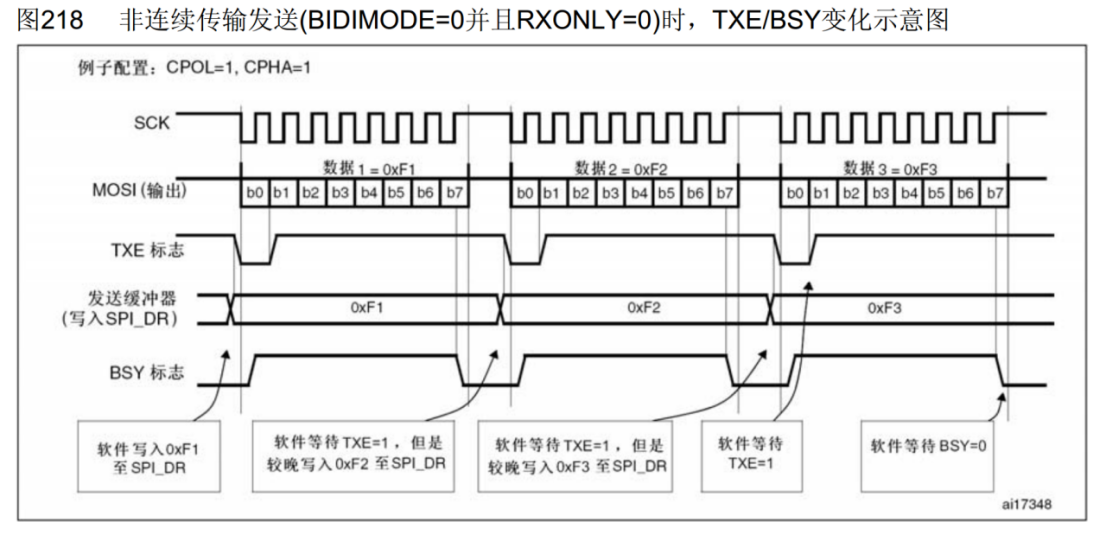
这个图使用了模式3演示
流程:1.等待TXE为1;2.写入发送的数据至TDR;3.等待RXNE为1;4.读取RDR的数据。之后交换字节,都是重复这4步,将这四步封装为一个函数,调用一次交换一个字节
6.软件/硬件波形对比


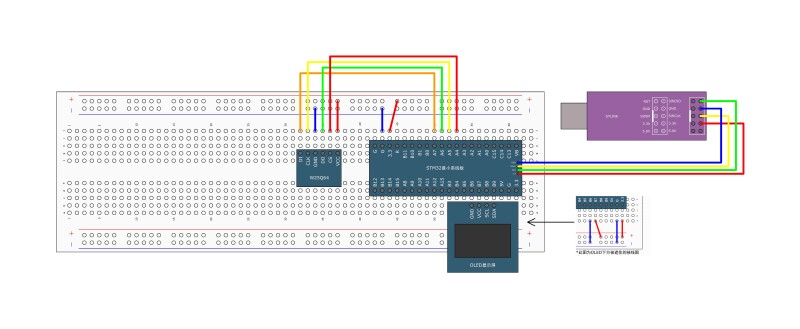
7.硬件SPI读写W25Q64
第一步:按图接线到面包板上
第二步:复制软件SPI读写W25Q64代码,将底层代码MySPI修改为硬件触发(非连续传输)即可,其他模块无需更改
第三步:SPI模块修改
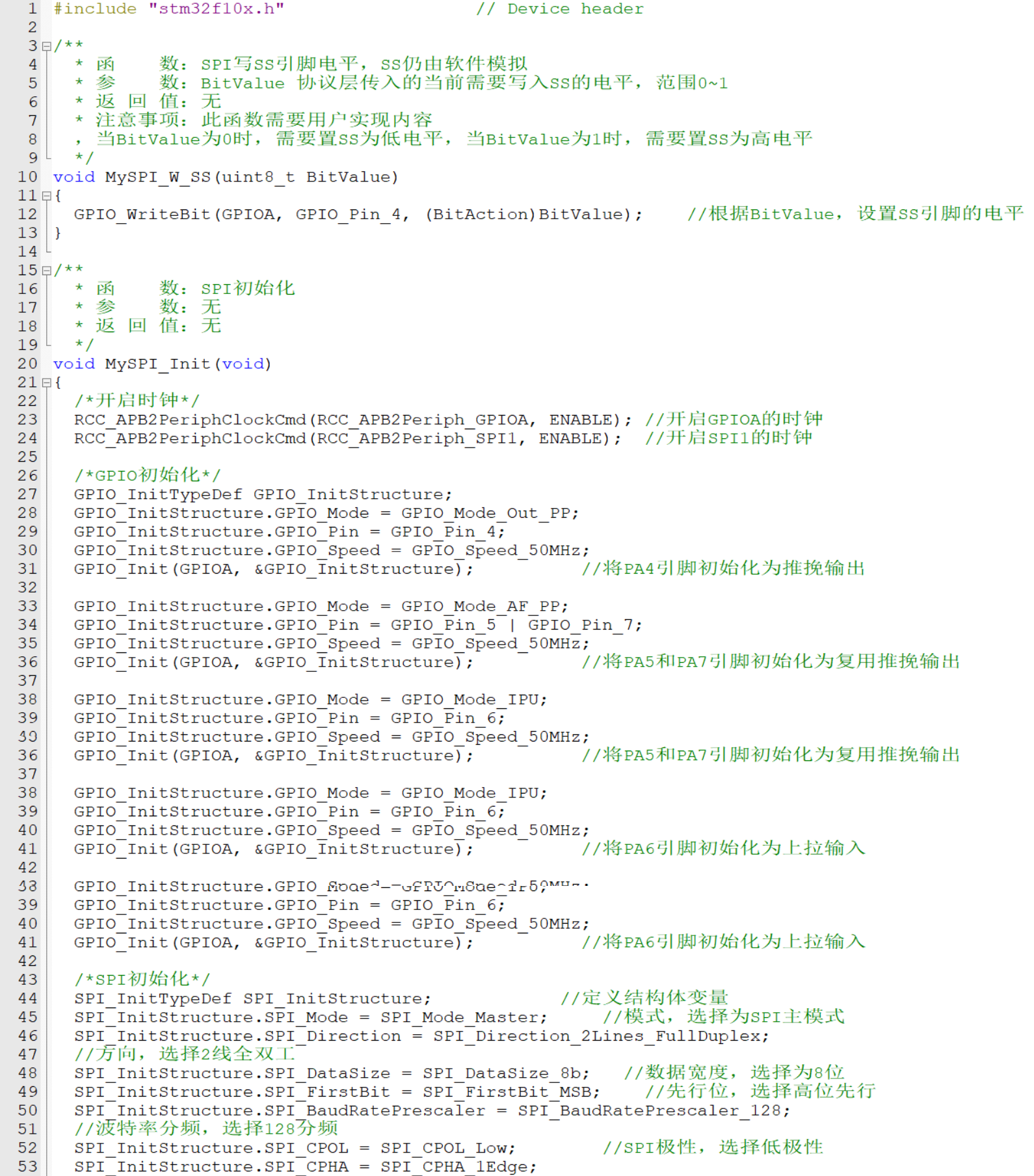
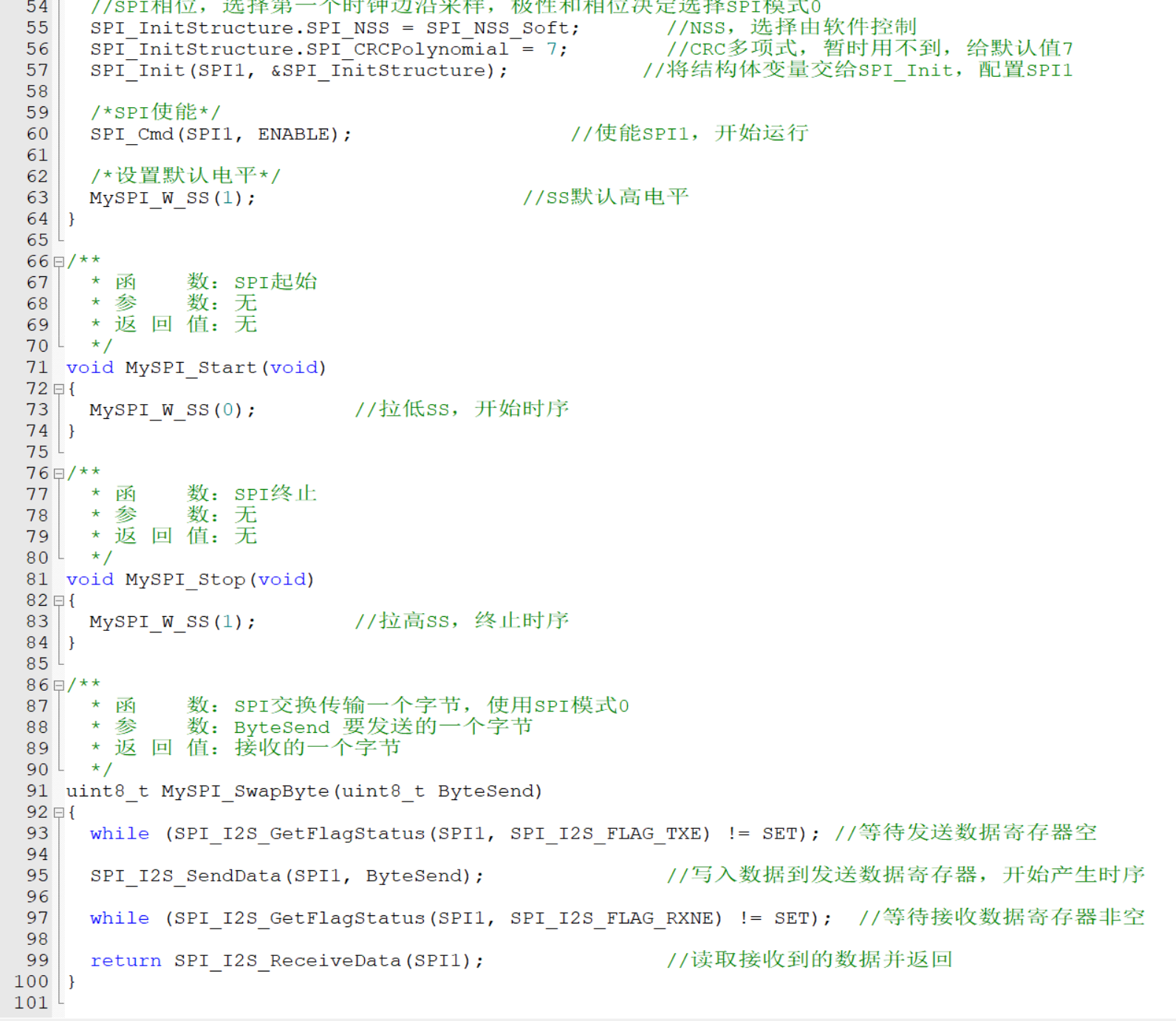
初始化步骤:1.开启时钟,开启SPI和GPIO的时钟;2.初始化GPIO口,其中SCK、MOSI是由硬件外设控制的输出信号,所以配置为复用推挽输出,MISO是硬件外设的输入信号,配置为上拉输入,SS是软件控制的输出信号,配置为通用推完输出;3.配置SPI外设,使用一个结构体选参数;4.开关控制
其他不用修改,这里的标志位不用手动清除,自动清除了,但是在STM32的大部分标志位是需要手动清除的
硬件SPI读写W25Q64完整代码
8.SPI相关库函数
恢复缺省配置、初始化
结构体变量初始化
外设使能
中断使能
DMA使能
写DR数据寄存器
读DR数据寄存器
获取标志位、清除标志位、获取中断状态、清除中断挂起位
剩下的都是I2S和一些很少使用的库函数







