具身机器人VLA算法入门及实战(一):具身智能系统及VLA
-
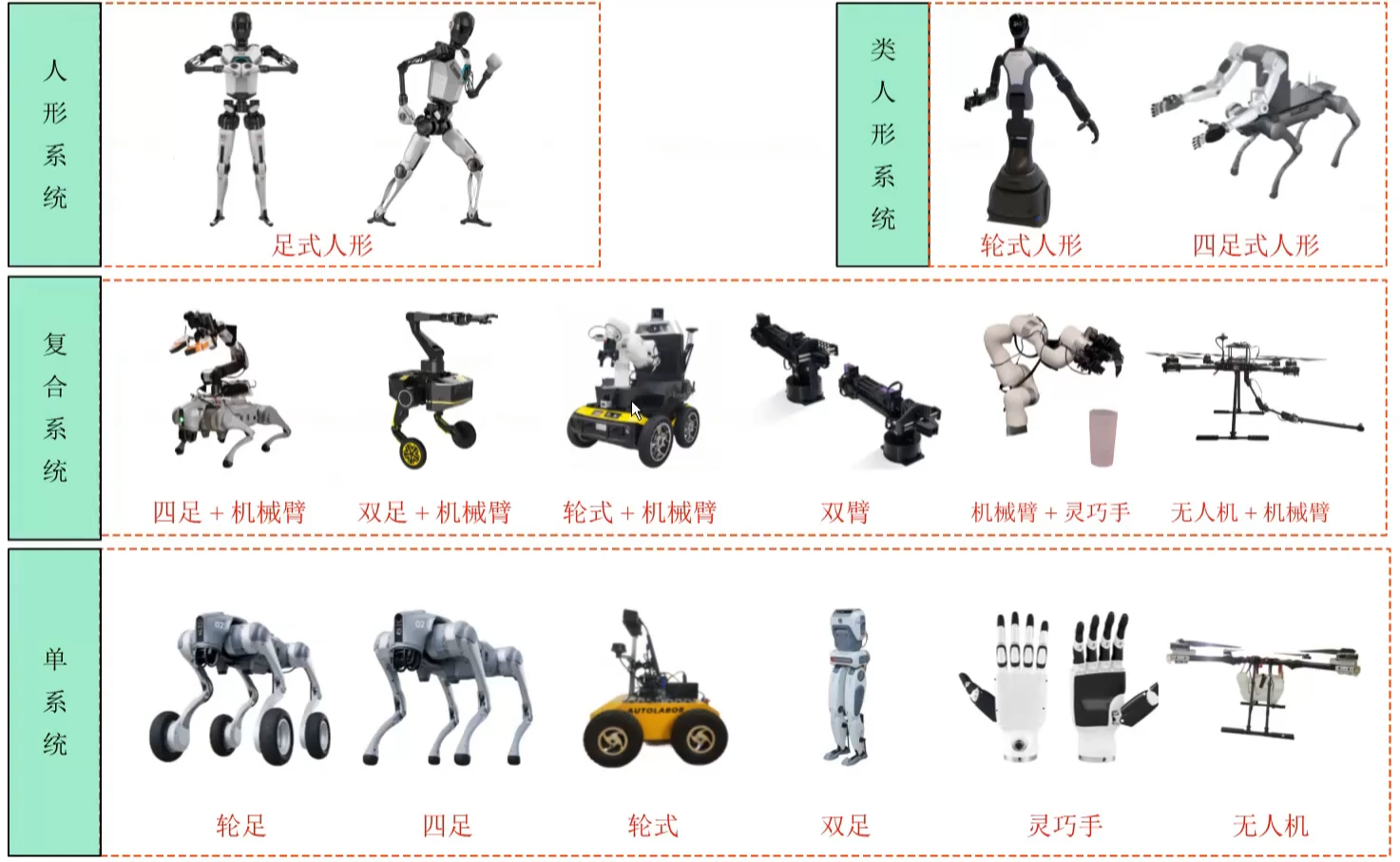
- 一、常见具身智能系统
- 二、具身智能数据获取方式
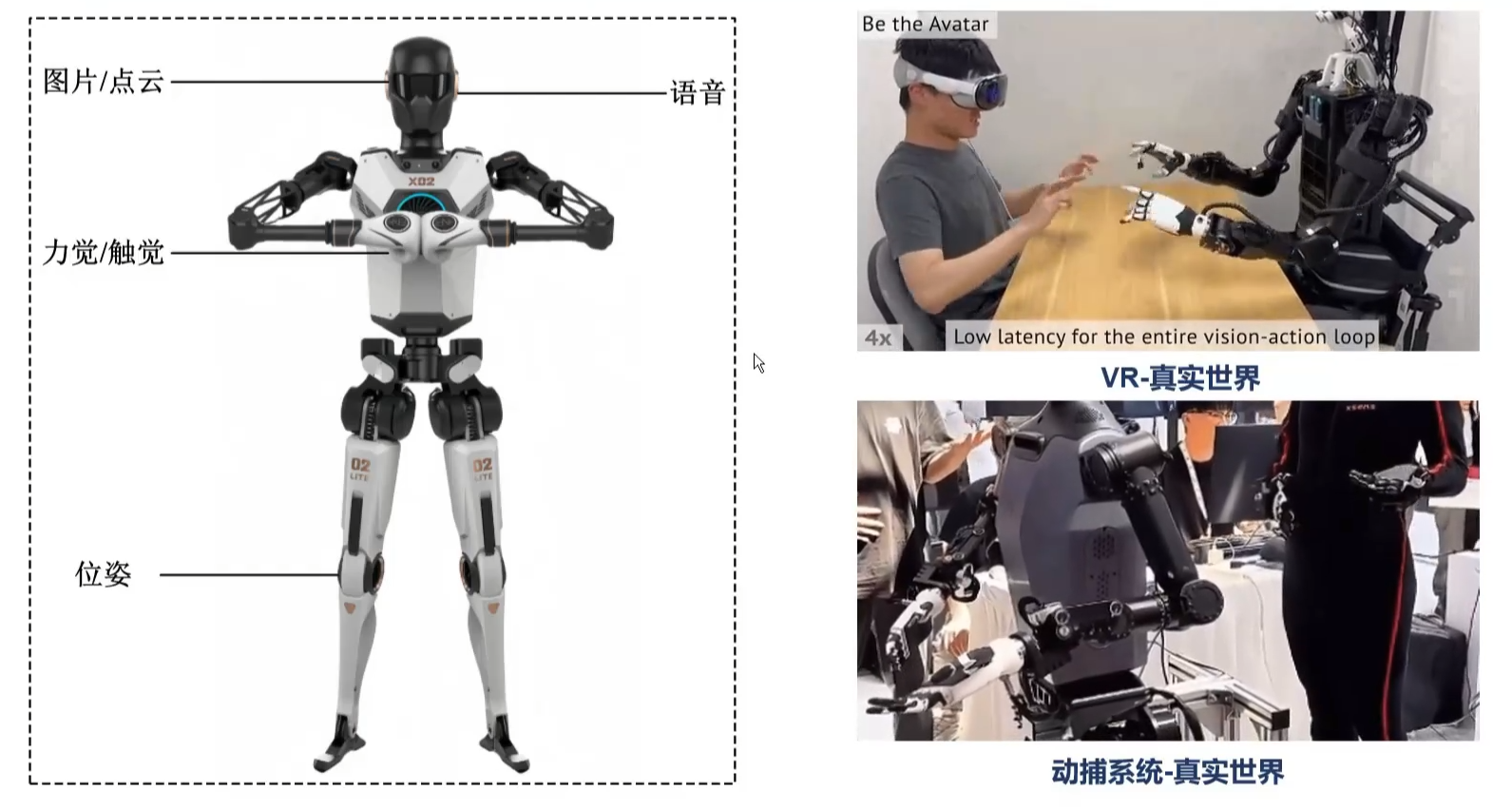
- 三、具身智能-感知系统
- 四、具身智能学习方式
- 五、工业机器人及应用需求
- 六、VLA架构及开源项目
-
- [6.1 VLA架构](#6.1 VLA架构)
- [6.2 开源项目](#6.2 开源项目)
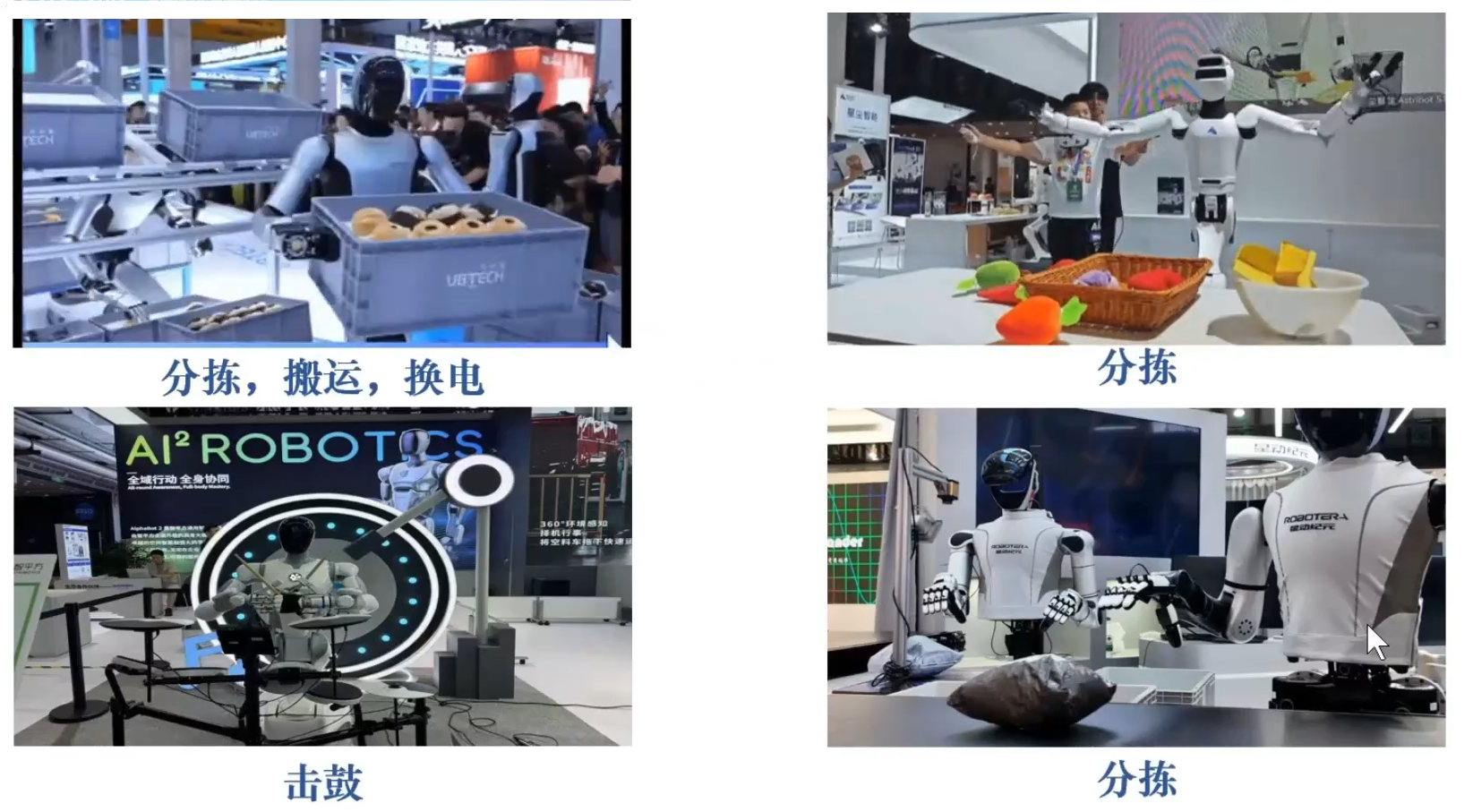
- 七、机器人操作案例
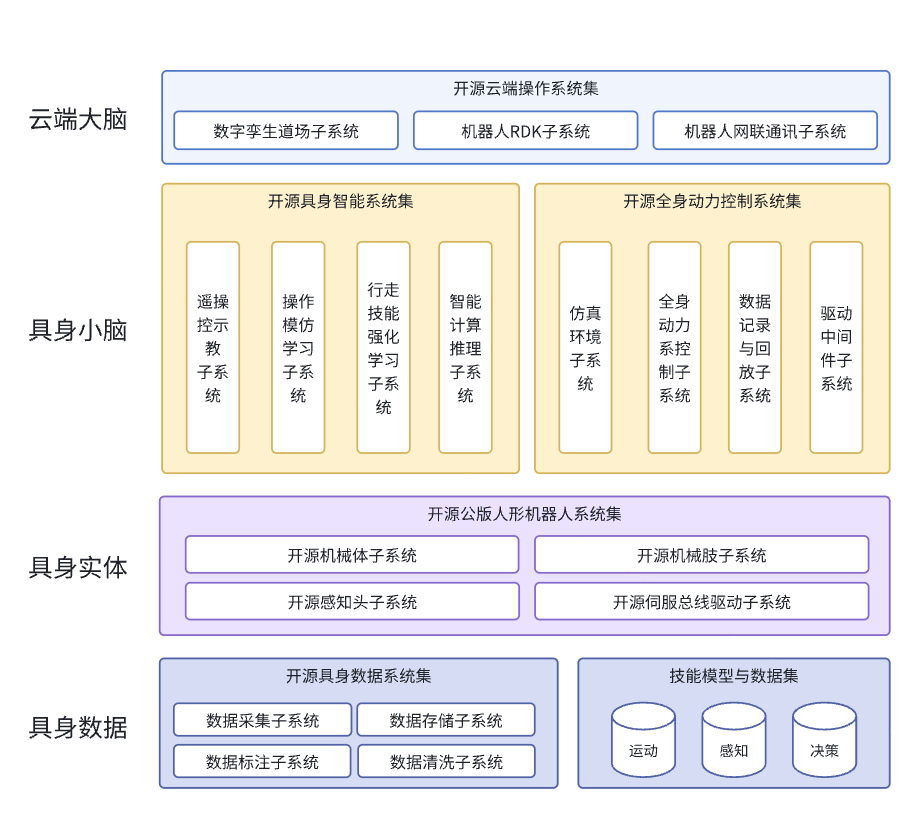
一、常见具身智能系统
二、具身智能数据获取方式
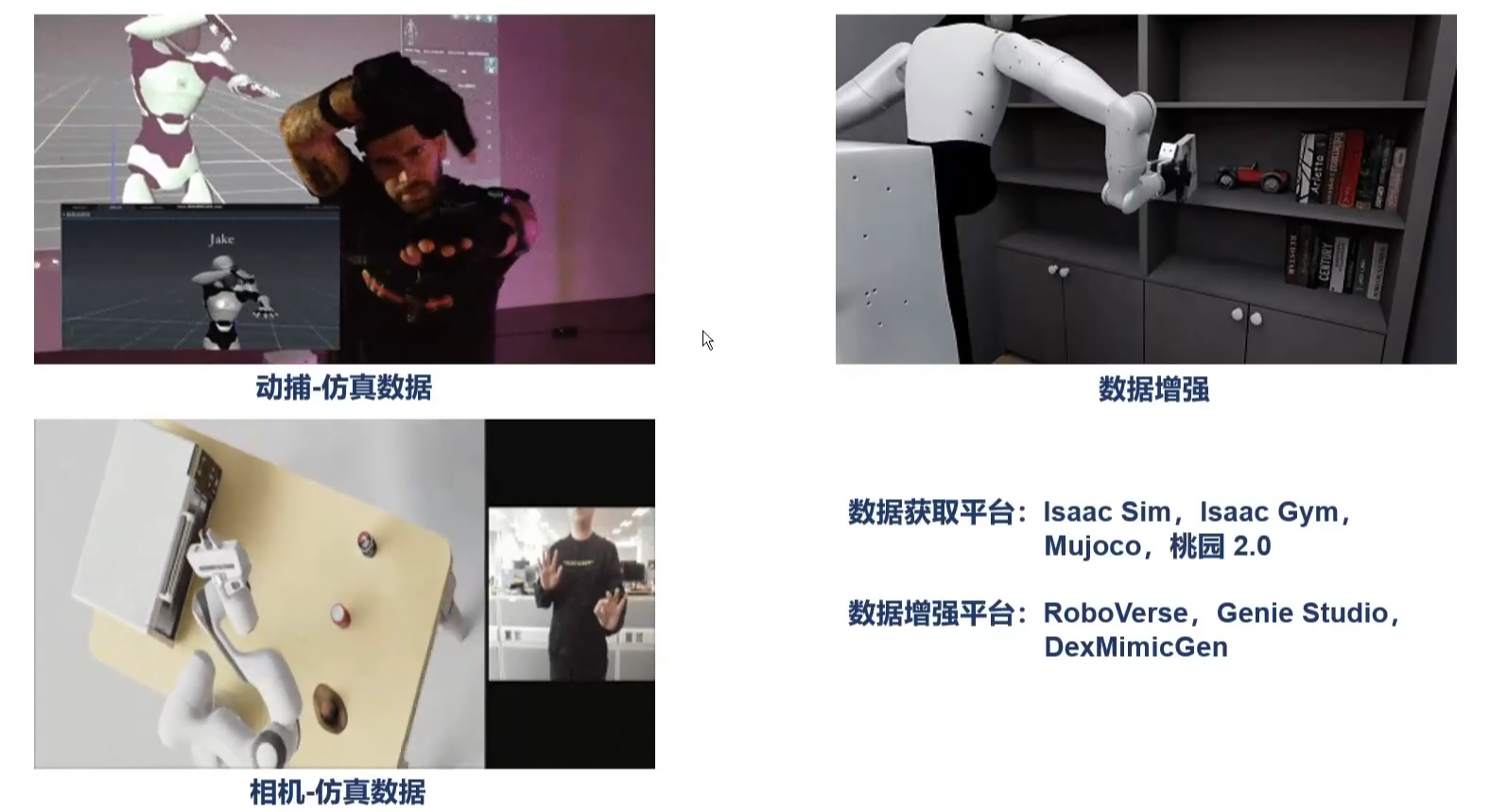
数据获取平台: Isaac Sim, Isaac Gym, Mujoco, 桃园 2.0
数据增强平台: RoboVerse, Genie Studio, DexMimicGen
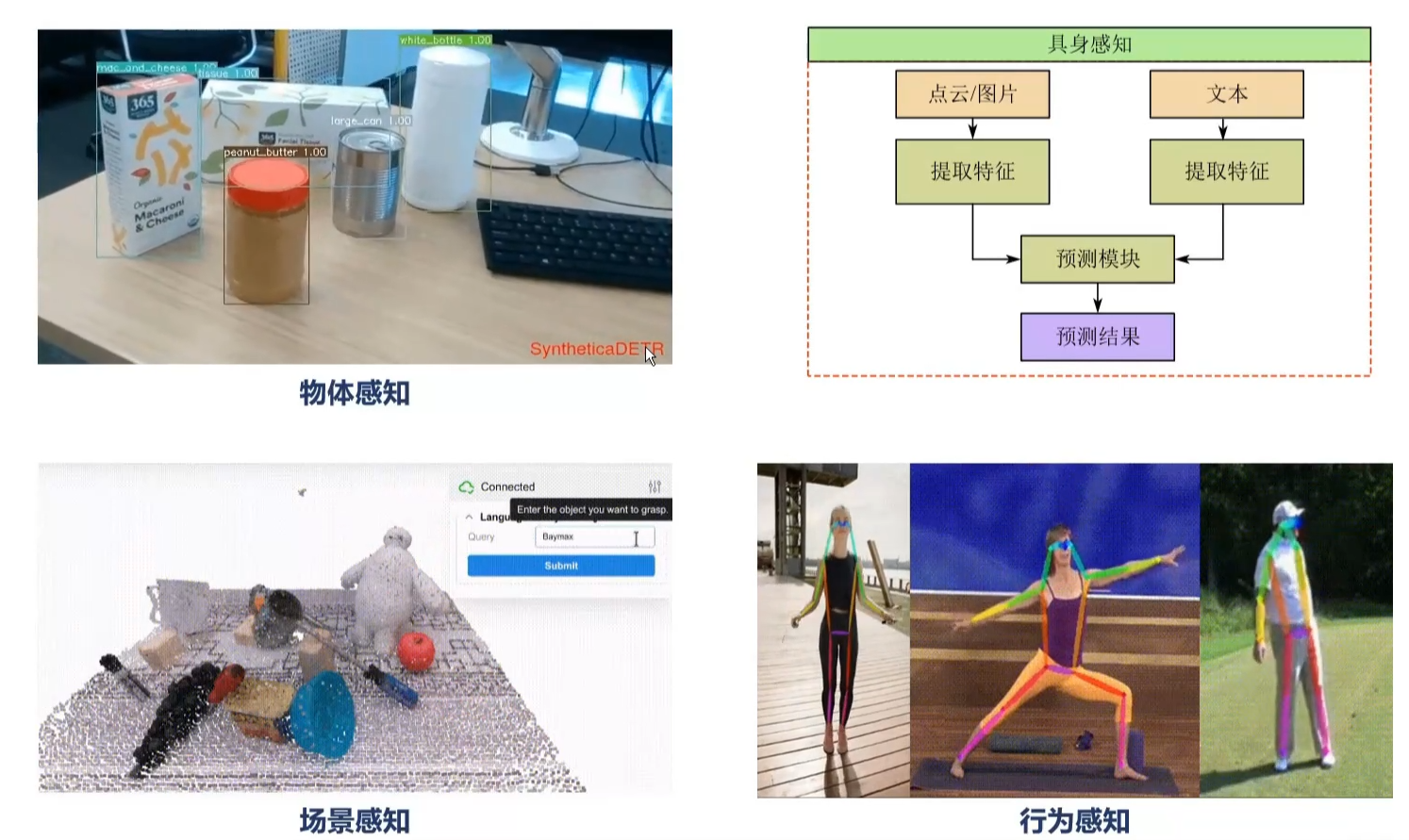
三、具身智能-感知系统
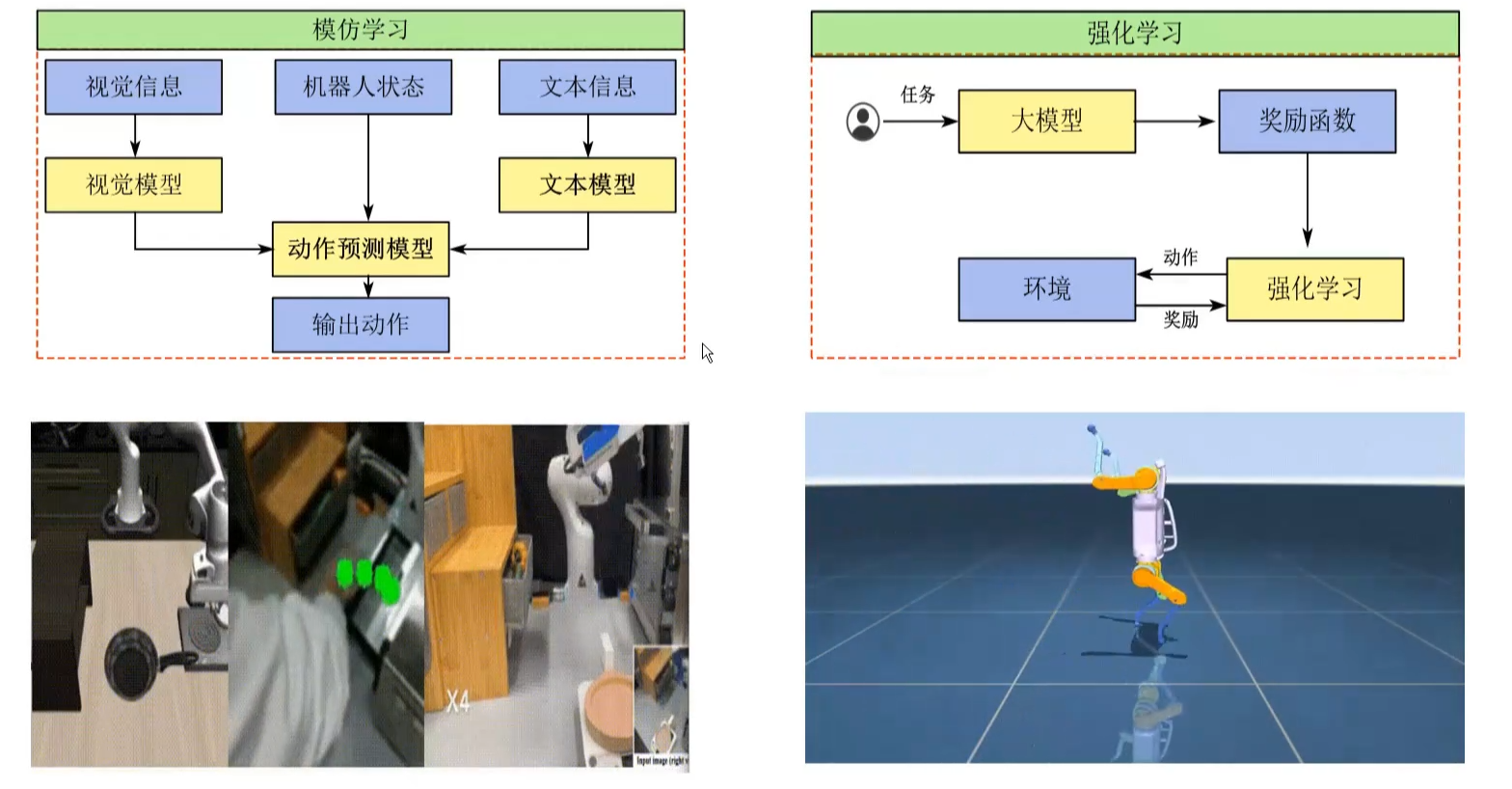
四、具身智能学习方式
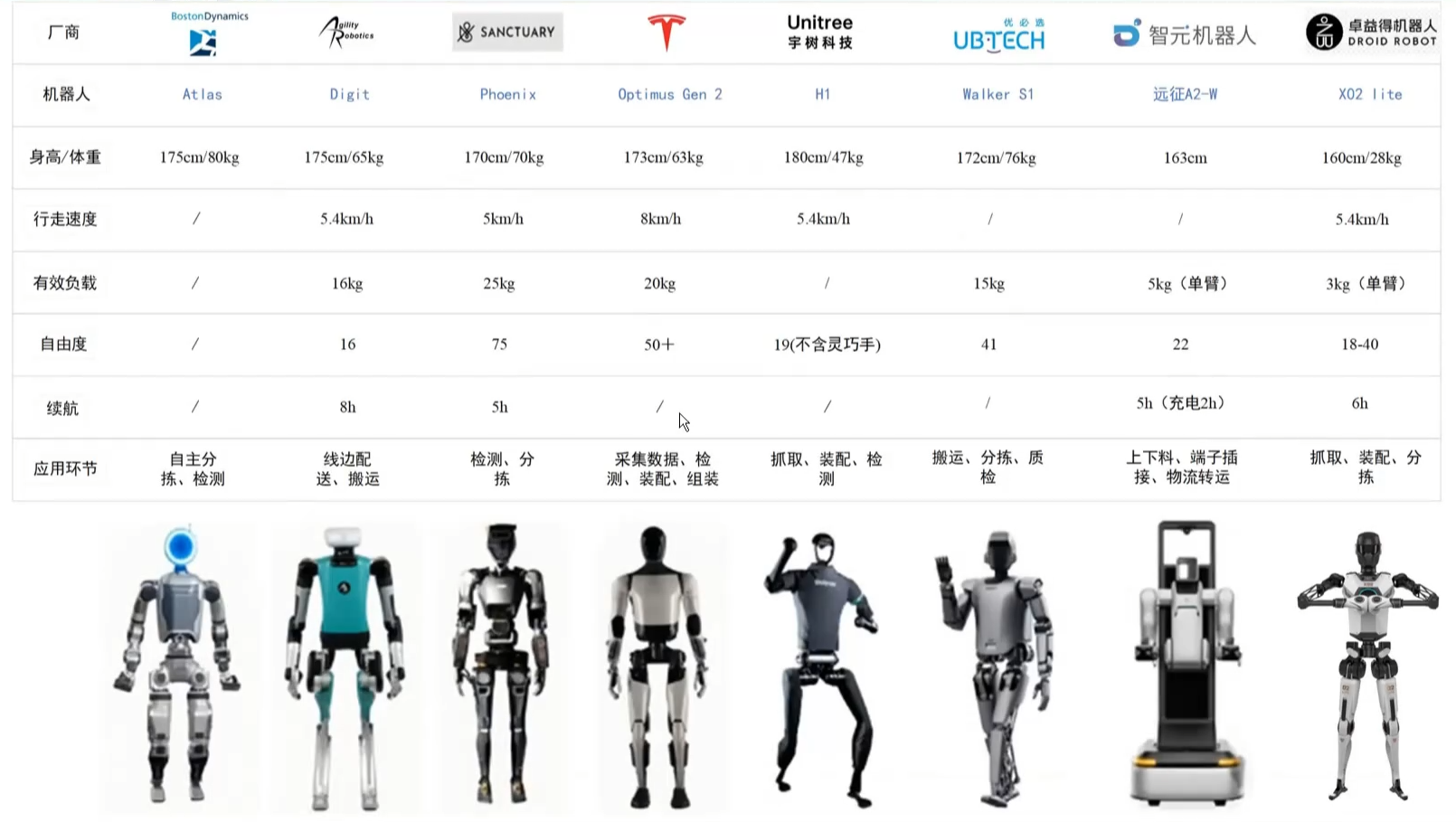
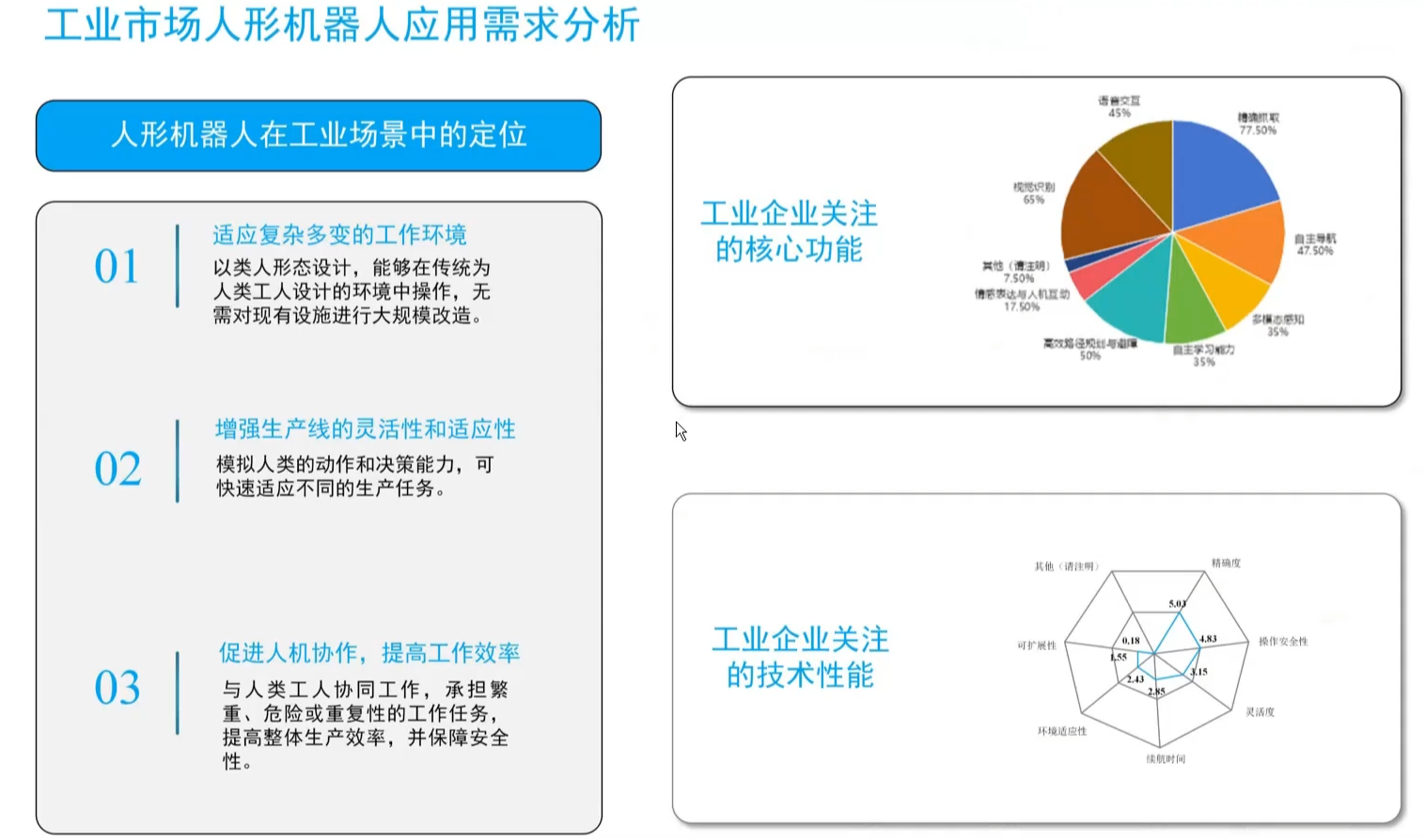
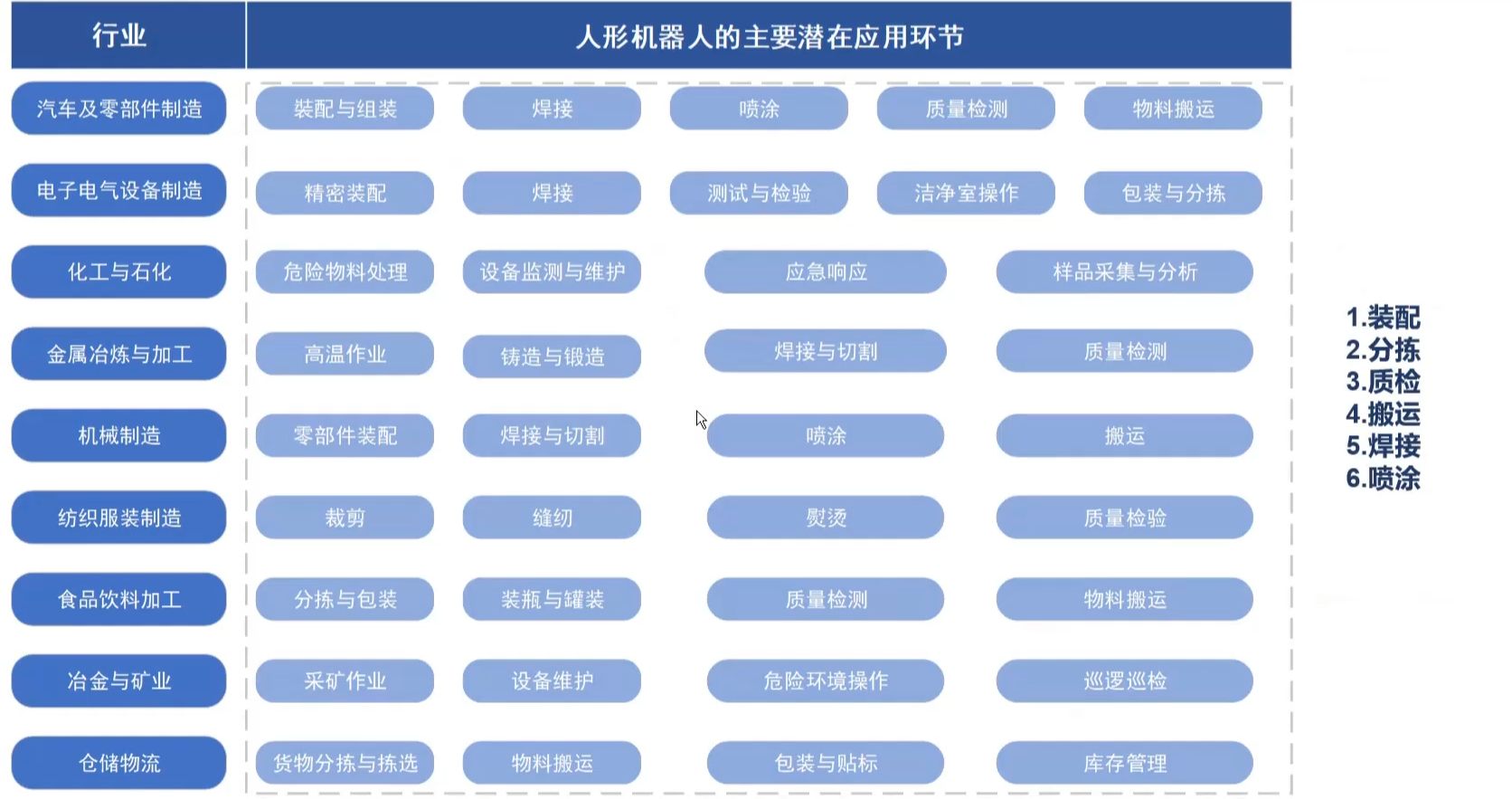
五、工业机器人及应用需求
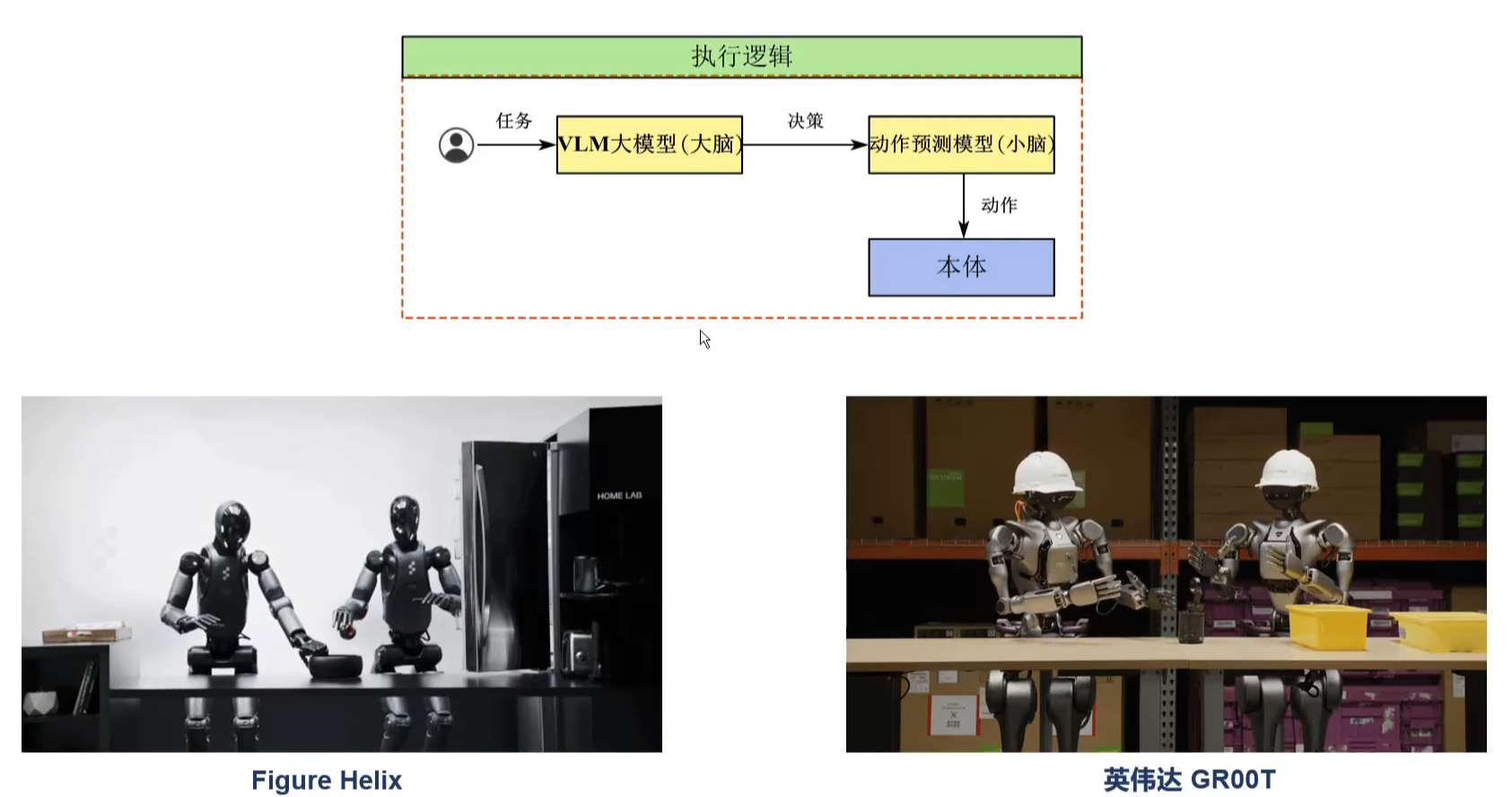
六、VLA架构及开源项目
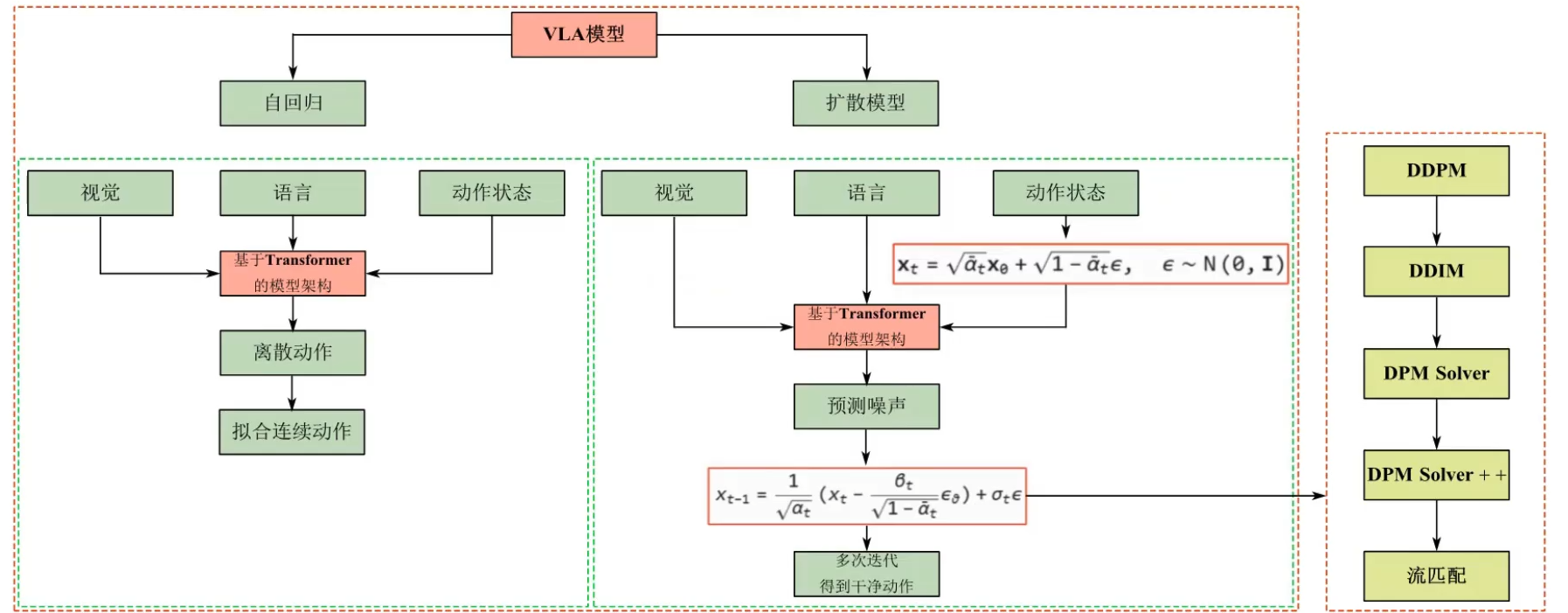
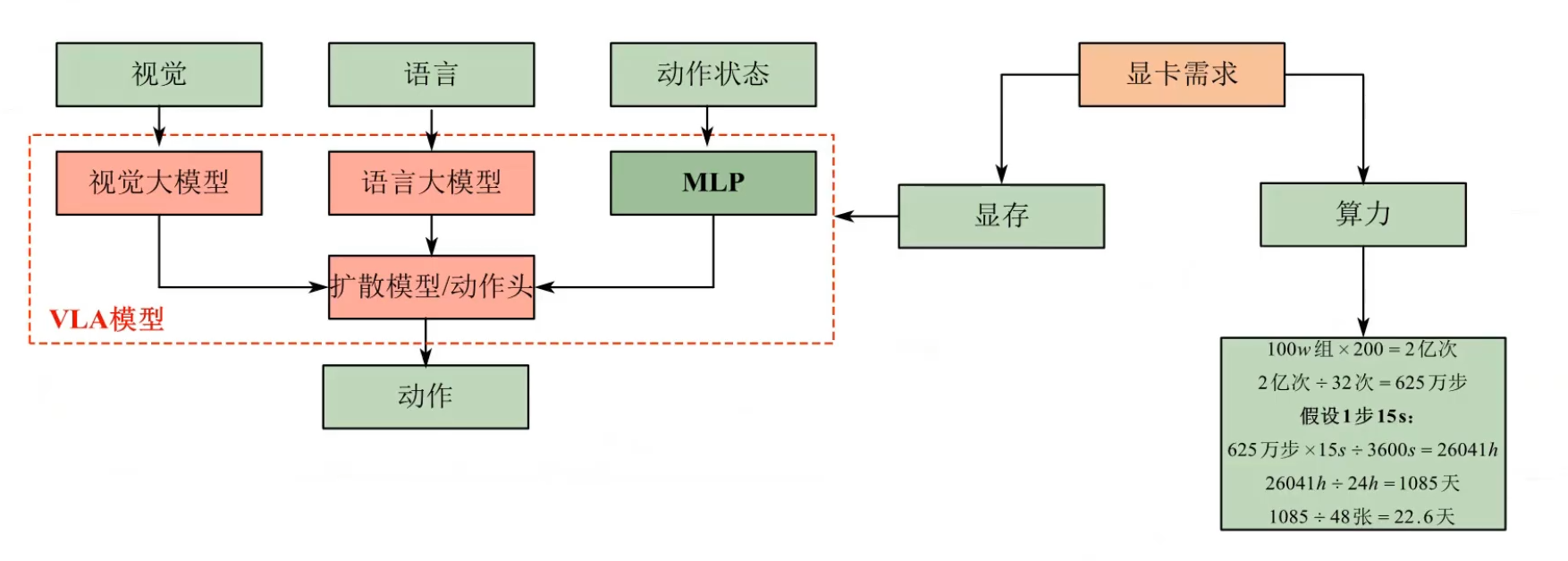
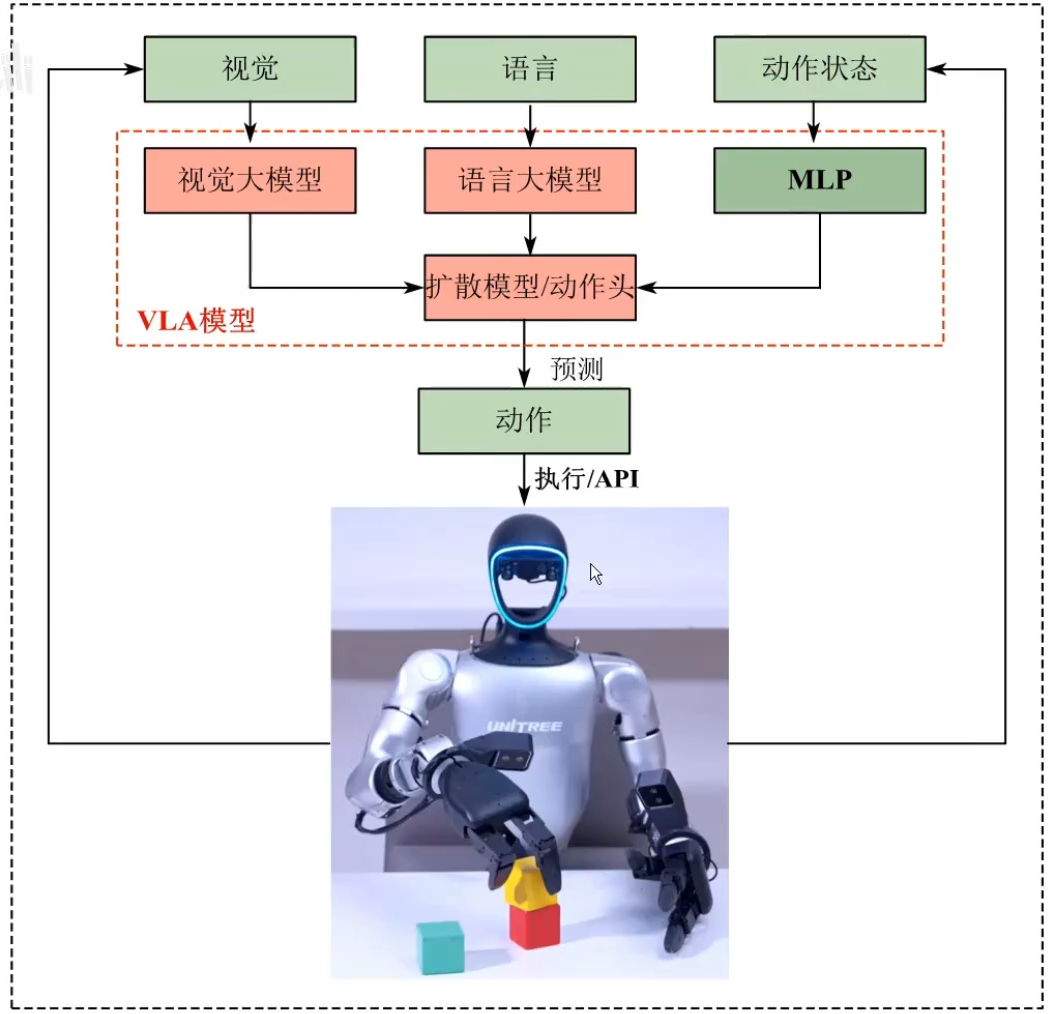
6.1 VLA架构
6.2 开源项目
-
智元机器人(远征A1)
- EI-Brain框架
- 云端超脑(任务级)+大脑(任务级+技能级)+小脑(指令级)+脑干(伺服级)
- EI-Brain框架
-
Openloong(青龙)
- 由人形机器人(上海)有限公司、国家地方共建人形机器人创新中心与开放原子开源基金会(OpenAtom Foundation)共同运营的开源项目。本仓库提供了一套基于 MPC 与 WBC 的仿人机器人控制框架,可部署在 Mujoco 仿真平台上。基于国家地方共建人形机器人创新中心"青龙"机器人模型,提供行走、跳跃、盲踩障碍物三种运动示例,在实物样机上实现了机器人的行走 、盲踩障碍两种运动。
- 项目特点
- 易部署 提供全面的代码运行环境部署解决方案,以便用户能够轻松配置其所需的工作环境,本代码仓库包含了主要依赖,无需进行众多第三方库的安装,简化整个部署过程。
- 可扩展 控制框架结构采用分层模块化设计,旨在提高系统的可维护性和可扩展性,系统各功能模块在逻辑和功能上具有明确的界限,为二次开发提供了更加友好的环境,使开发人员能够更轻松地对系统进行功能定制和扩展。
- 易理解 代码结构简洁,遵循针对功能进行模块封装的代码设计原则,应用总线进行模块间数据交互,减少封装冗余,有助于降低代码复杂度;算法实现采用"读取-计算-写入"的简单逻辑,提高代码的可理解性。
- 开源地址:https://github.com/loongOpen
- 项目详情:https://github.com/loongOpen/OpenLoong/
-
UMI(Stanford)
-
DexCap(Stanford)
- 灵巧手+模仿学习+扩散策略
七、机器人操作案例