在地形测绘、灾害监测、生态评估等场景中,从遥感图像提取高度信息(高程数据)是核心需求。本文将从技术原理出发,用Python实现完整的高度提取流程,并汇总遥感处理中常用的工具库,帮你快速上手遥感数据处理。
一、核心实战:遥感图像高度提取(基于立体像对)
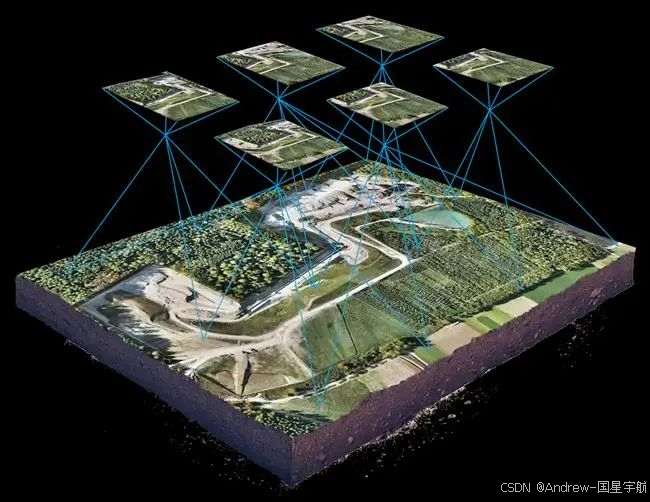
遥感图像提取高度的核心是立体像对(Stereo Pair)+ 视差计算------通过同一区域不同视角的两张图像,计算地物的像素位置差异(视差),再结合摄影测量原理推导高程。
1.1 技术原理速览
- 立体像对:同一区域的左、右两张遥感图(重叠度需>60%);
- 视差(Disparity):同一地物在左右图中的像素偏移,距离越近,视差越大;
- 高程公式 :已知相机参数(焦距f、基线距B,从图像元数据获取),高程计算为:
h=B⋅fd+h0h = \frac{B \cdot f}{d} + h_0h=dB⋅f+h0
其中,ddd为视差,h0h_0h0为参考高度(如海平面)。
1.2 环境准备
需安装基础依赖库,用于图像处理、遥感数据读写:
bash
pip install opencv-python numpy gdal matplotlib rasterio # 核心库1.3 完整代码实现(分步骤)
步骤1:读取遥感立体像对与地理信息
遥感图像常用TIFF格式,需保留地理坐标(用于后续结果映射),这里用gdal读取图像数据和地理变换参数:
python
import cv2
import numpy as np
from osgeo import gdal
import matplotlib.pyplot as plt
def read_rs_image(path):
"""读取遥感图像,返回灰度数组+地理变换参数"""
ds = gdal.Open(path) # 打开TIFF文件
if ds is None:
raise ValueError(f"无法读取图像:{path}")
# 读取图像数组(多通道转灰度)
arr = ds.ReadAsArray() # shape: (通道数, 高度, 宽度)
if len(arr.shape) == 3: # 多通道(如RGB)转灰度
arr = cv2.cvtColor(arr.transpose(1,2,0), cv2.COLOR_BGR2GRAY)
else:
arr = arr.transpose(1,2) # 单通道调整为 (高度, 宽度)
# 获取地理变换参数(用于后续保存高程图的坐标映射)
geo_transform = ds.GetGeoTransform() # (左上角x, x分辨率, 0, 左上角y, 0, -y分辨率)
return arr, geo_transform
# 读取左、右立体像对(需替换为你的文件路径)
left_img, left_geo = read_rs_image("left.tif")
right_img, right_geo = read_rs_image("right.tif")
# 查看图像尺寸(需确保左右图尺寸一致)
print(f"图像尺寸:左图{left_img.shape},右图{right_img.shape}")步骤2:立体匹配计算视差图
用OpenCV的SGBM(Semi-Global Block Matching) 算法计算视差------比基础块匹配更鲁棒,适合遥感图像的复杂地形:
python
def compute_disparity_map(left, right):
"""SGBM算法计算视差图"""
# SGBM参数(需根据图像分辨率调整,关键参数已标注)
window_size = 3 # 匹配窗口大小(奇数,分辨率高则调小)
min_disp = 0 # 最小视差值
num_disp = 128 # 视差范围(必须是16的倍数,范围越大越慢)
# 初始化SGBM匹配器
left_matcher = cv2.StereoSGBM_create(
minDisparity=min_disp,
numDisparities=num_disp,
blockSize=window_size,
P1=8 * 3 * window_size**2, # 平滑项:相邻像素视差差异惩罚(小值)
P2=32 * 3 * window_size**2, # 平滑项:远距离像素视差差异惩罚(大值)
disp12MaxDiff=1, # 左右视差一致性检查阈值
uniquenessRatio=15, # 视差唯一性阈值(过滤模糊匹配)
speckleWindowSize=100, # 噪声过滤窗口大小
speckleRange=32 # 噪声过滤视差范围
)
# 计算视差(结果需除以16转为实际视差值)
disparity = left_matcher.compute(left, right).astype(np.float32) / 16.0
return disparity
# 计算视差图
disparity_map = compute_disparity_map(left_img, right_img)
# 可视化视差图(用jet色表,值越大代表视差越大)
plt.figure(figsize=(8, 6))
plt.imshow(disparity_map, cmap="jet")
plt.colorbar(label="视差值(像素)")
plt.title("SGBM立体匹配视差图")
plt.axis("off")
plt.show()步骤3:视差图转高程图
根据摄影测量公式计算高程,需过滤无效视差(如负值、0,避免除以零错误):
python
def disparity_to_elevation(disparity, focal_len, baseline, h0=0):
"""视差图转换为高程图"""
# 1. 过滤无效视差(视差需为正,排除遮挡、噪声区域)
valid_mask = disparity > 1e-6 # 避免除以零
elevation = np.zeros_like(disparity, dtype=np.float32)
# 2. 高程公式:h = (基线距*焦距)/视差 + 参考高度
elevation[valid_mask] = (baseline * focal_len) / disparity[valid_mask] + h0
elevation[~valid_mask] = np.nan # 无效区域标记为NaN(后续可插值填充)
return elevation
# 相机参数(从遥感图像元数据获取,此处为示例值,需替换为实际值!)
focal_length = 1500 # 焦距(像素单位,从相机标定或图像元数据获取)
baseline = 50 # 基线距(米,两相机中心的距离)
h0 = 0 # 参考高度(如海平面,米)
# 计算高程图
elevation_map = disparity_to_elevation(disparity_map, focal_length, baseline, h0)步骤4:保存高程图为GeoTIFF(保留地理坐标)
将高程结果保存为标准GeoTIFF,方便后续用ArcGIS、QGIS等工具分析:
python
def save_elevation_tif(elevation, geo_transform, output_path):
"""保存高程图为GeoTIFF(保留地理坐标)"""
rows, cols = elevation.shape
# 1. 创建GeoTIFF驱动
driver = gdal.GetDriverByName("GTiff")
# 2. 创建输出文件(宽度、高度、波段数、数据类型)
out_ds = driver.Create(
output_path, cols, rows, 1,
gdal.GDT_Float32 # 浮点型,支持NaN
)
# 3. 设置地理变换参数(继承左图坐标)
out_ds.SetGeoTransform(geo_transform)
# 4. 写入高程数据
out_ds.GetRasterBand(1).WriteArray(elevation)
# 5. 标记NoData值(NaN对应GDAL的NoData)
out_ds.GetRasterBand(1).SetNoDataValue(np.nan)
# 6. 释放资源
out_ds.FlushCache()
print(f"高程图已保存至:{output_path}")
# 保存高程图
save_elevation_tif(elevation_map, left_geo, "elevation.tif")
# 可视化高程图(用terrain色表,模拟地形起伏)
plt.figure(figsize=(8, 6))
plt.imshow(elevation_map, cmap="terrain")
plt.colorbar(label="高程(米)")
plt.title("遥感图像提取的高程图")
plt.axis("off")
plt.show()1.4 关键注意事项(避坑指南)
- 数据质量是前提 :
- 立体像对应先做辐射校正 (消除光照差异)和几何校正(确保同名点对齐);
- 避免云雾、阴影区域(会导致视差计算错误)。
- 参数优化技巧 :
- 图像分辨率高 → 减小
window_size(如3),分辨率低 → 增大(如5); - 若视差图有大量空洞 → 增大
num_disp或减小uniquenessRatio。
- 图像分辨率高 → 减小
- 精度提升方法 :
- 用地面控制点(GCP)校准相机参数(焦距、基线);
- 对无效区域(NaN)用反距离加权(IDW)插值填充;
- 结合LiDAR数据或已有DEM验证精度。
二、扩展:遥感图像处理常用库汇总
除了上文的opencv-python、gdal,还有很多专用库可应对不同场景,按功能分类整理如下:
2.1 数据读写与基础处理
| 库名 | 核心功能 | 优势与适用场景 | 示例代码片段 |
|---|---|---|---|
rasterio |
遥感影像读写、坐标处理 | API更Python化,支持上下文管理器,替代GDAL | with rasterio.open("img.tif") as src: arr = src.read() |
geopandas |
矢量数据(Shapefile/GeoJSON)处理 | 与Pandas兼容,可裁剪影像至矢量边界 | gdf = gpd.read_file("roi.shp"); rasterio.mask.mask(src, gdf.geometry) |
xarray |
多维遥感数据(时序/多光谱)处理 | 支持标签索引,适合MODIS/Landsat时序分析 | ds = xarray.open_rasterio("time_series.tif"); ds.sel(band=1) |
2.2 光谱与高光谱处理
| 库名 | 核心功能 | 优势与适用场景 | 示例代码片段 |
|---|---|---|---|
spectral |
高光谱数据降维、端元分析、矿物识别 | 专为高光谱设计,支持ENVI格式 | img = spectral.open_image("hyper.hdr"); pca = spectral.principal_components(img) |
Py6S |
大气校正(消除大气散射/吸收影响) | 基于6S辐射传输模型,提升定量精度 | from Py6S import SixS; s = SixS(); s.atmos_profile = SixS.AtmosProfile.PredefinedType("MidlatitudeSummer") |
pyhdf |
HDF格式数据(MODIS/OMI卫星)读写 | 支持NASA卫星Level-1/2数据 | from pyhdf.SD import SD; hdf = SD("modis.hdf"); data = hdf.select("reflectance") |
2.3 地理投影与坐标转换
| 库名 | 核心功能 | 优势与适用场景 | 示例代码片段 |
|---|---|---|---|
pyproj |
坐标系转换(WGS84→UTM、高斯投影等) | 基于PROJ库,支持所有主流坐标系 | transformer = Transformer.from_crs("EPSG:4326", "EPSG:32650"); x,y = transformer.transform(30, 120) |
cartopy |
地理数据可视化(带投影的地图绘制) | 替代basemap,支持UTM/墨卡托等投影 |
ax = plt.axes(projection=ccrs.UTM(50)); ax.imshow(arr, transform=ccrs.UTM(50)) |
2.4 深度学习与语义分割
| 库名 | 核心功能 | 优势与适用场景 | 备注 |
|---|---|---|---|
torchgeo |
遥感专用深度学习库(数据集+模型) | PyTorch生态,支持EuroSAT/LoveDA数据集 | 适合快速搭建土地覆盖分类、变化检测模型 |
segmentation-models-pytorch |
语义分割模型(U-Net/DeepLab) | 支持多光谱输入,可加载预训练权重 | 需调整输入通道数(如4通道 Sentinel-2) |
tensorflow-graphics |
3D视觉工具(立体匹配、相机几何优化) | TensorFlow生态,适合提升视差计算精度 | 需一定3D数学基础 |
2.5 专业遥感工具包
| 库名 | 核心功能 | 优势与适用场景 | 备注 |
|---|---|---|---|
Orfeo Toolbox (OTB) |
全流程遥感处理(辐射校正、分类、变化检测) | 开源替代ENVI/ERDAS,支持Python绑定 | 需要单独安装OTB,再导入otbApplication |
scikit-image |
图像处理(滤波、分割、特征提取) | API清晰,与NumPy无缝兼容 | 适合遥感图像预处理(去噪、边缘检测) |
三、结语
本文从实战出发,覆盖了遥感图像高度提取的全流程,并汇总了不同场景的专用库。实际应用中,需根据数据类型(如高光谱、时序遥感)和需求(如精度、速度)选择合适的工具组合。