REF:基于语义栅格约束的路径规划算法
1. SLAM建图
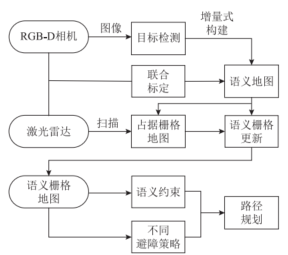
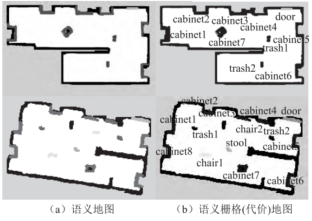
利用YOLOv5进行目标检测和RGB-D相机深度信息提取,获取环境的语义信息生成语义地图,与激光建图算法构建的占据栅格地图融合,通过栅格更新生成语义栅格地图。
2. 路径规划
-
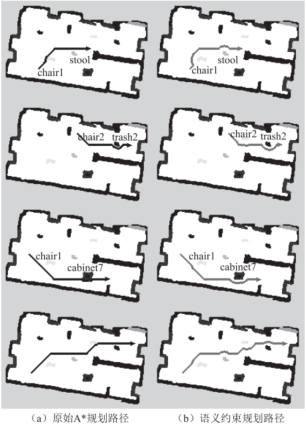
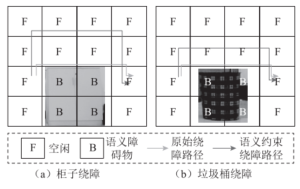
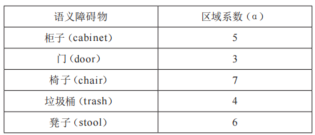
通过自适应蒙特卡洛定位(AMCL)实现二维场景下的机器人定位得到机器人位姿,并使用Astar算法进行全局路径规划,根据语义栅格,对不同语义物体设置不同的安全区域距离,调整绕障策略,对规划路径进行语义约束。
-
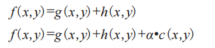
传统Astar算法的代价函数,由起点到当前点的实际代价g(x,y)和当前点到目标点的启发式估计代价h(x,y)构成,如式1,在此基础上,引入区域系数和绕障代价α•c(x,y),如式2
3. 实验对比