提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
Ubuntu18.04 D435i RGB相机标定
- 一、环境配置
- 二、RGB相机标定
- [三、IMU标定见(【Ubuntu18.04 D435i RGB相机与IMU标定详细版(二)】)](#三、IMU标定见(【Ubuntu18.04 D435i RGB相机与IMU标定详细版(二)】))
- [四、RGB与IMU联合标定(【Ubuntu18.04 D435i RGB相机与IMU标定详细版(三)】)](#四、RGB与IMU联合标定(【Ubuntu18.04 D435i RGB相机与IMU标定详细版(三)】))
一、环境配置
笔者的版本:ubuntu18.04、ros melodic
1、D435i驱动
源码:
c
git clone https://github.com/IntelRealSense/librealsense.git依赖:
c
sudo apt-get install git libssl-dev libusb-1.0-0-dev pkg-config libgtk-3-dev
sudo apt-get install libglfw3-dev libgl1-mesa-dev libglu1-mesa-dev at编译:
c
mkdir build && cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j8
sudo make install测试:
c
realsense-viewer成功!
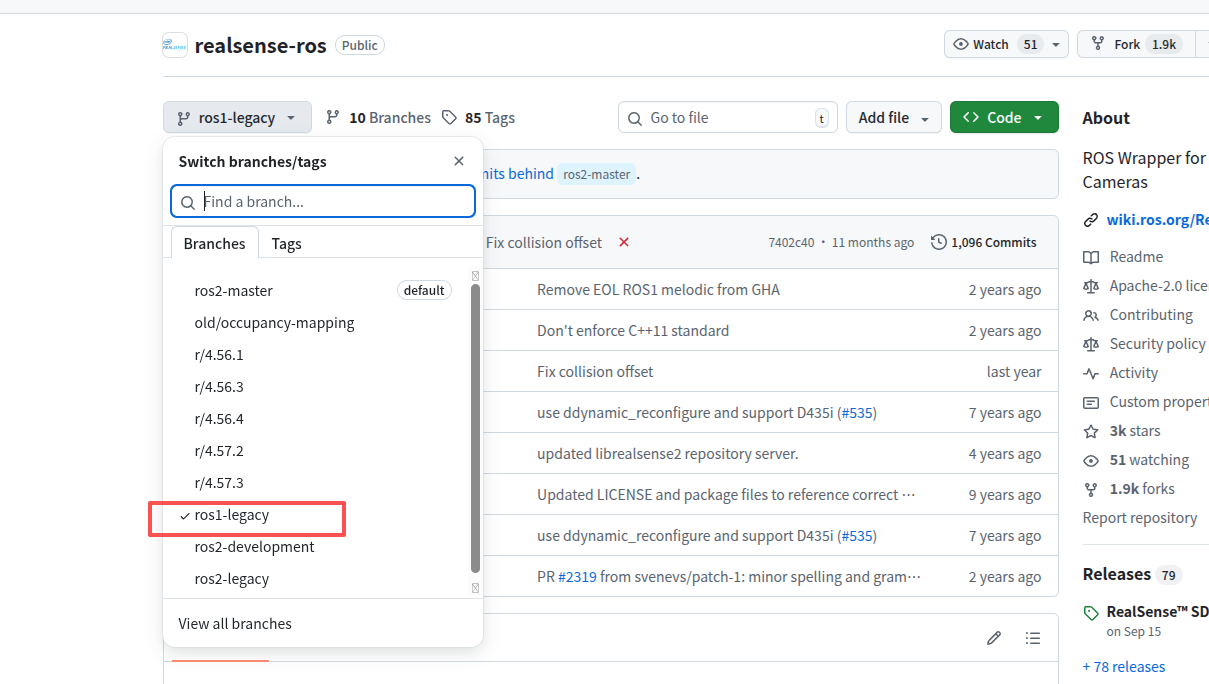
2、ROS包安装(注意笔者是ros1)
这里我选择ros1版本
编译:
c
mkdir -p realsense_ws/src
cd realsense_ws/src
#ros1对应的源码:
git clone -b ros1-legacy https://github.com/IntelRealSense/realsense-ros.git
git clone https://github.com/pal-robotics/ddynamic_reconfigure.git
cd .. && catkin_make添加环境依赖:
c
echo "source ~/realsense_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc测试安装是否成功:
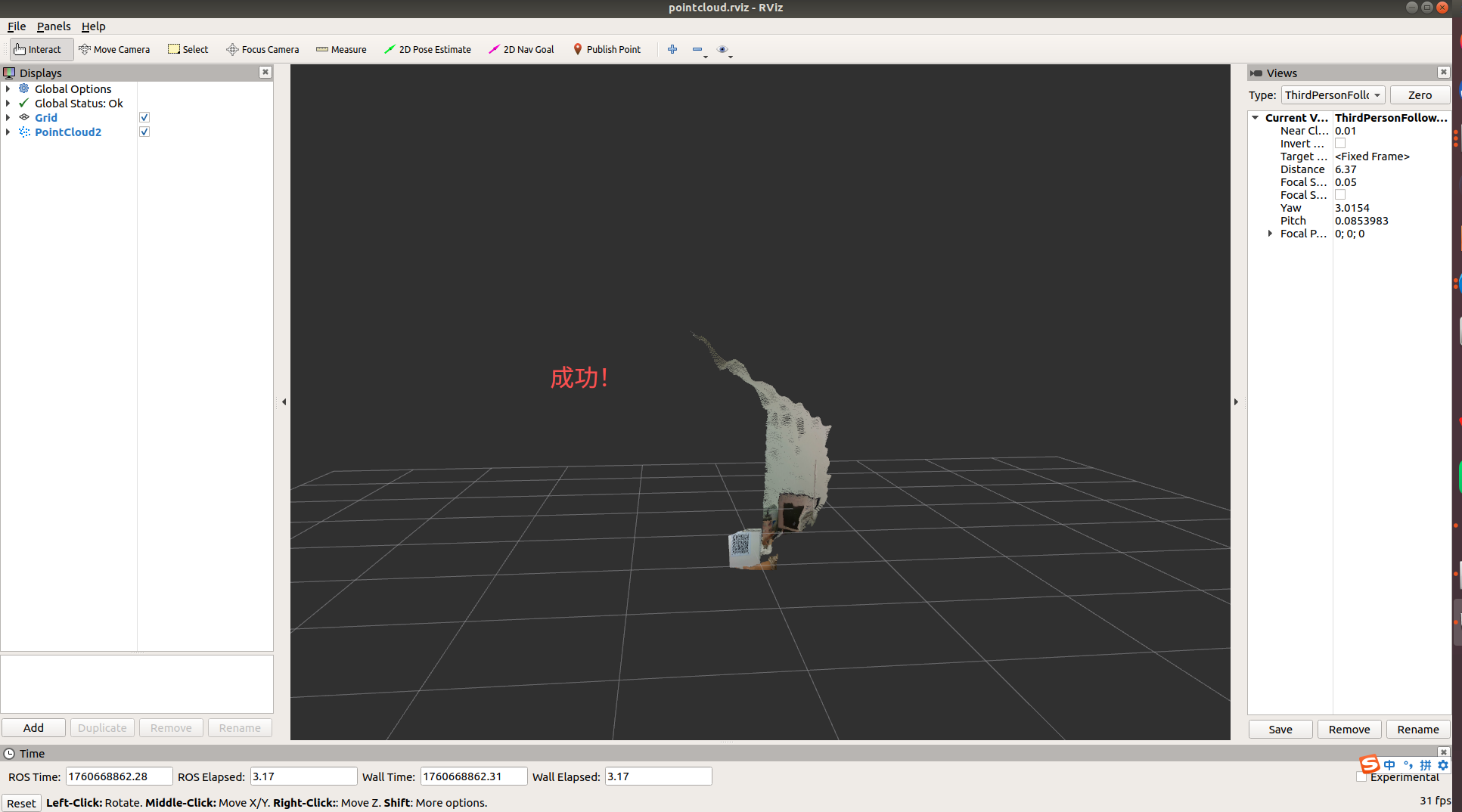
c
roslaunch realsense2_camera demo_pointcloud.launch 成功!
3、Kalibr工具安装
依赖:
c
sudo apt-get install python-setuptools python-rosinstall ipython libeigen3-dev doxygen libopencv-dev ros-melodic-vision-opencv ros-melodic-image-transport-plugins ros-melodic-cmake-modules software-properties-common libpoco-dev python-matplotlib python-scipy python-git python-pip ipython libtbb-dev libblas-dev liblapack-dev python-catkin-tools libv4l-dev python-pyx安装python-igraph:
c
sudo apt-get install -y libigraph0-dev注意笔者安装的是老版本的
c
sudo pip install python-igraph==0.7.0创建工作空间:
c
mkdir -p ~/kalibr_workspace/src
cd ~/kalibr_workspace下载源码
c
cd ~/kalibr_workspace/src
git clone https://github.com/ethz-asl/Kalibr.git编译
c
catkin_make -DCMAKE_BUILD_TYPE=Release设置环境变量
c
echo "source ~/kalibr_workspace/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc测试
c
rosrun kalibr kalibr_create_target_pdf --type checkerboard --nx 5 --ny 8 --csx 0.045 --csy 0.045成功
二、RGB相机标定
1.文件准备
创建一个文件夹,用来保存摄像头校正数据。
c
mkdir ~/calib_data/camera_calib
cd ~/calib_data/camera_calib下载标定版和yaml文件:
下载链接:https://github.com/ethz-asl/kalibr/wiki/downloads
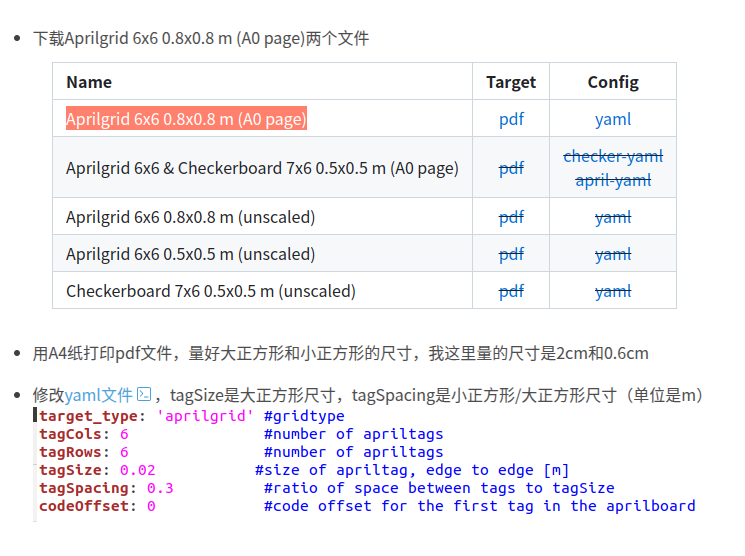
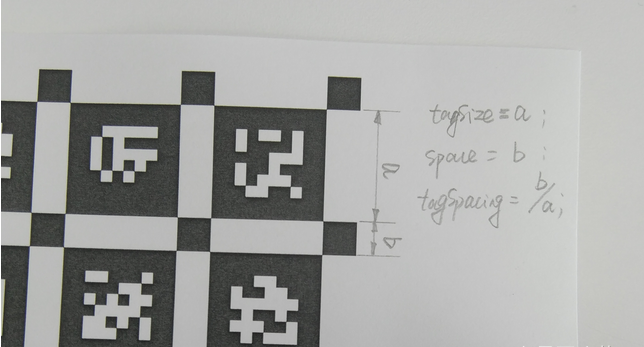
这里一定要注意根据自己的标定版,修改tagsize和tagspacing
2.录制摄像头标定rosbag
运行realsense相机
c
roslaunch realsense2_camera rs_camera.launch # D435i默认分辨率是1280*720,30fps,可以通过参数指定具体的分辨率
roslaunch realsense2_camera rs_camera.launch color_width:=640 color_height:=480 color_fps:=30
# 如果不指定帧率,无法成功修改分辨率,所以分辨率需要一起指定
# 理论上在这里同样可以修改帧率,但我遇到了报错,提示设备不支持,所以分辨率这里需要指定默认的30fps将话题重命名为color,并利用throttle工具降低录制RGB图像的频率至4Hz
c
rosrun topic_tools throttle messages /camera/color/image_raw 4.0 /color
# /camera/color/image_raw 表示原始的图像话题
# 4.0 表示新话题帧率
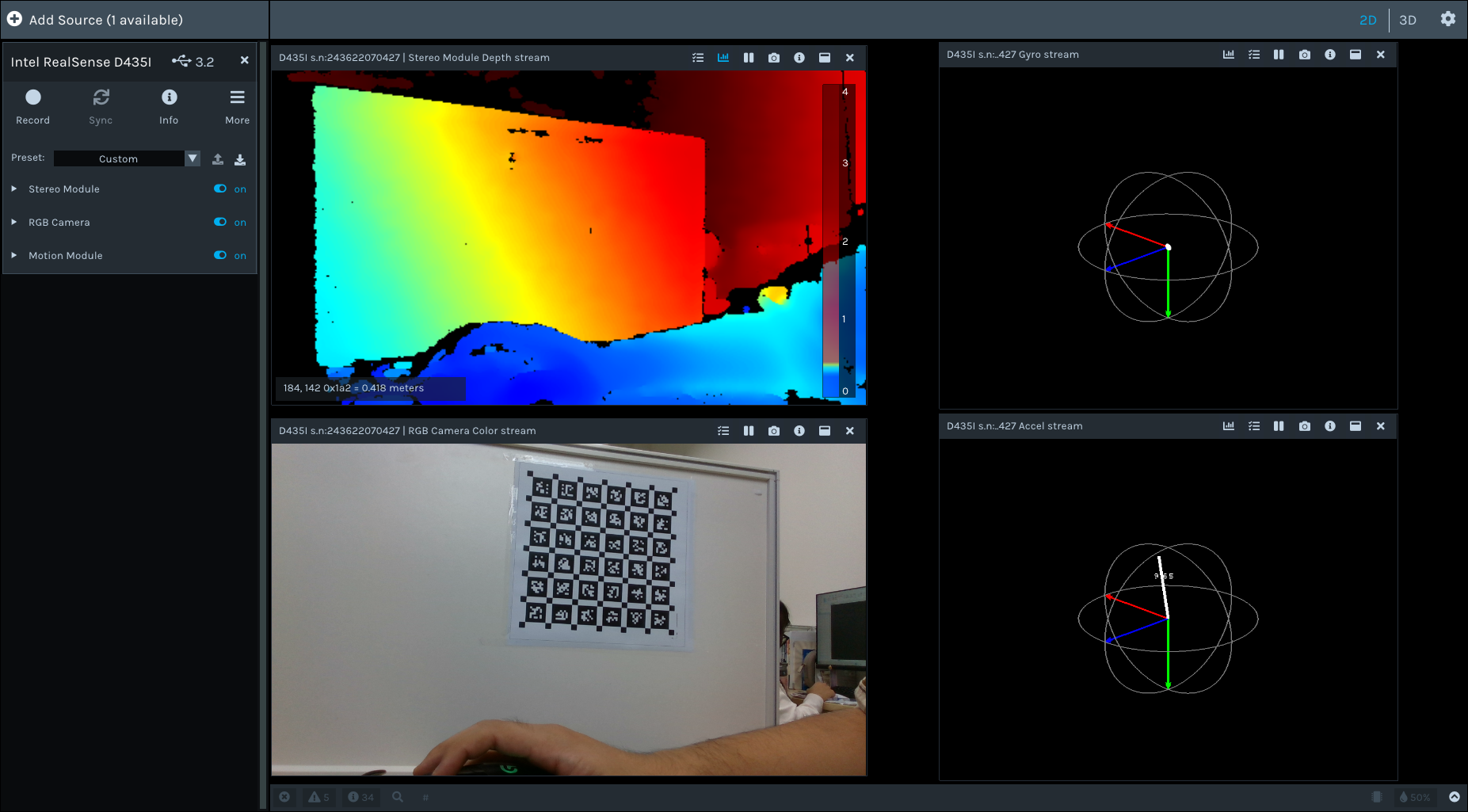
# /cam0/color/image_raw 表示映射的新话题名(与本文不一样,只做解释)打开rviz查看摄像头视角,录制的过程中调整相机的角度,各个方向都采集一下,但是拍到的棋盘格要完整。---
注意:fied frame : carmera_link
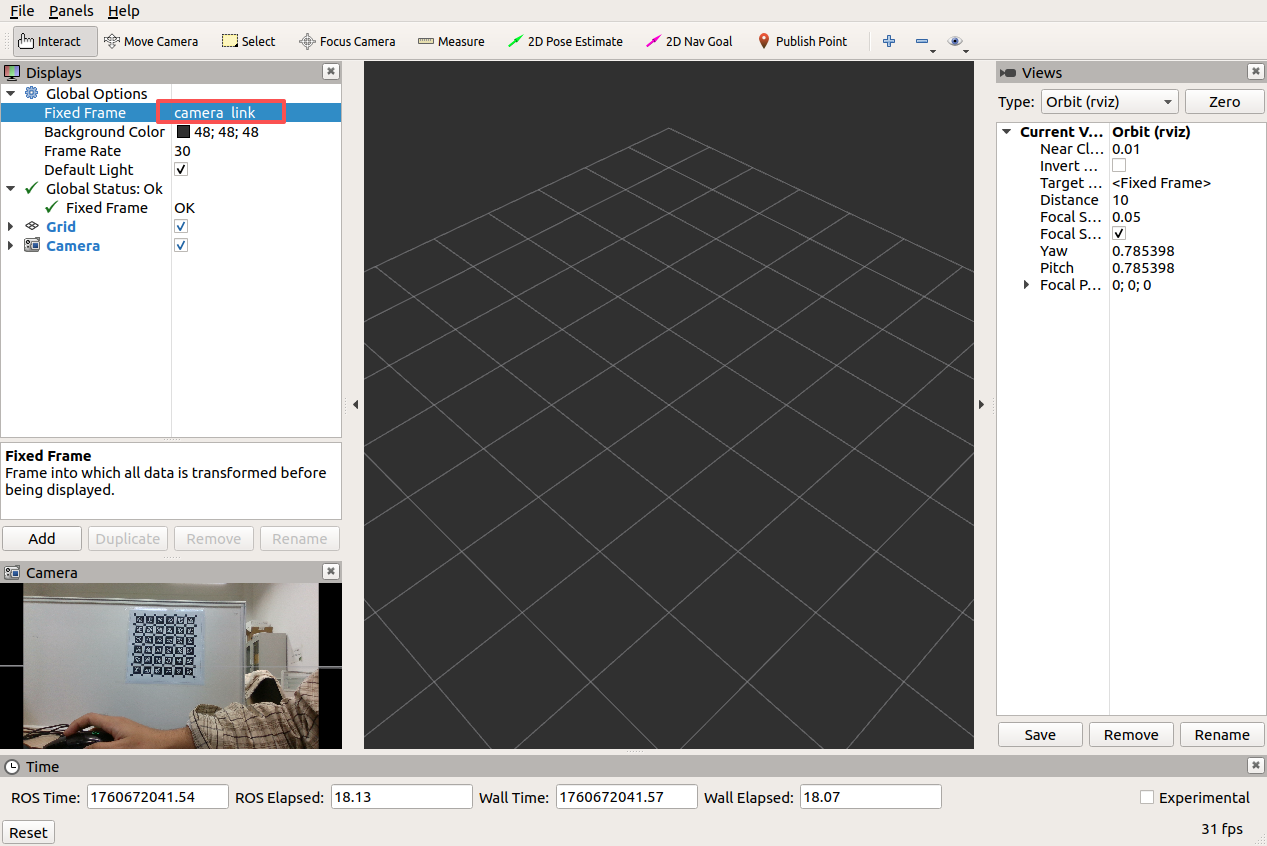
或者用rqt查看
c
rqt_image_view
进入自己想要保存包的文件夹,然后用rosbag录制,ctrl+c结束录制
-O为重命名包的名字,这里命名为camd435i
c
cd ~/calib_data/camera_calib
rosbag record -O camd435i /color
# 录制图像话题数据名称为camd435i
# 录制图像话题数据 4fps注意:录制完之后检查一下camd435i.bag的大小,如果很小说明没录制成功

3.开始标定
代码如下(示例):
c
cd ~/calib_data/camera_calib
c
rosrun kalibr kalibr_calibrate_cameras --target april_6x6_80x80cm.yaml --bag camd435i.bag --models pinhole-radtan --topics /color
#可视化 --show-extraction
#第 5 帧到第 150 帧 进行标定--bag-from-to 5 150
#用于同步图像和 IMU 数据(如果有) --approx-sync 0.044.标定结果
生成三个文件