写在最前面
四足机器狗的控制已经成熟到顶了,没什么好写的。为了系列文章的完整性还是简单写一下,主要重点做CAN总线性能瓶颈分析,以及升级到CANFD后如何进行优化设计。
更多机器人本体控制总线分析,请关注系列文章:
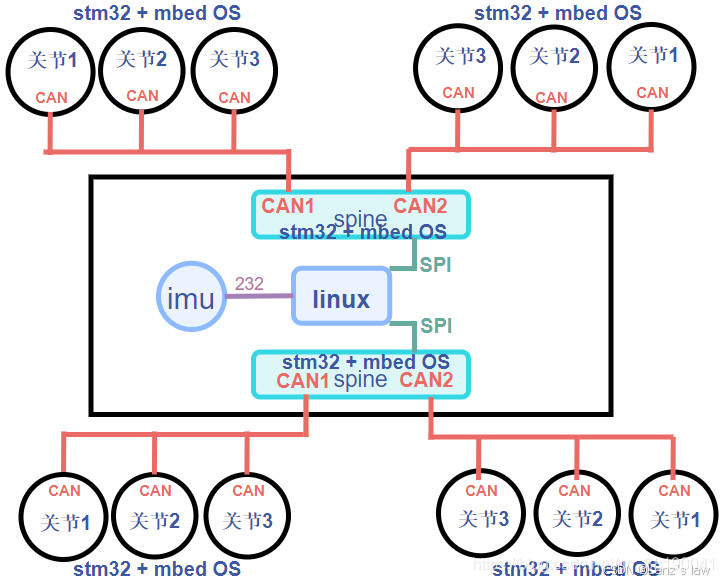
典型的四足机器狗控制架构(MIT Cheetah)
开源的MIT Cheetah四足机器狗可以说现存主流机器狗方案的鼻祖
采用了4条CAN2.0总线,分别控制4条腿,每条腿3个关节电机(包括后续小米的铁蛋,都是同样的方案)。
 图源:王崇卫 《MIT四足机器人MIT Cheetah的硬件框架》
图源:王崇卫 《MIT四足机器人MIT Cheetah的硬件框架》
电机控制需求
整机4条腿,每条腿3个关节,总共12个关节电机
电机控制频率1KHz
关节控制命令:8字节
关节状态上报:5字节
CAN2.0总线负载率计算
关节电机采用CAN2.0 1Mbps波特率,每条总线控制3个电机
|-------------|----------|----------|--------------|
| CAN数据长度 | 单帧耗时 | 帧/每秒 | 总线占用时间/S |
| 8字控制命令 | ~110us | 1000*3 | 330ms |
| 5字节电机回复 | ~85us | 1000*3 | 255ms |
| 合计 ||| ~585ms |
总线负载率:约58.5%
总线通讯帧率: 6000帧/秒
其他条件不变,如果电机回复状态也采用8字节,总线负载率约为 66%
为保证CAN总线实时性,减少竞争,负载率不能过高(一般控制在50%-80%)。MIT方案控制CAN总线负载率在60%左右,是比较合理的。
以上计算和分析也解释了为什么使用CAN2.0总线的机器狗,几乎都采用4组CAN总线,一条总线控制一条腿的3个电机。(再多确实CAN2.0总线带宽不够了)
基于CANFD优化控制方案
虽然采用4路CAN2.0总线控制12关节的方案在四足机器狗领域应用以及非常成熟。但随着机器狗功能性越来越多样化,背挂执行器和传感器的增加,使得4路CAN2.0总线还是力不从心。
1M/5M CANFD单路可控2条腿

如果通讯协议不变,仅升级CAN2.0 1Mbps波特率到CANFD 1M/5M波特率。
单路CANFD总线可轻松控制2条腿,6个电机,下面计算负载率(为了考虑余量,电机回复也采用8字节)。
|-------------|----------|----------|--------------|
| CAN数据长度 | 单帧耗时 | 帧/每秒 | 总线占用时间/S |
| 8字控制命令 | ~50us | 1000*6 | 300ms |
| 8字节电机回复 | ~50us | 1000*6 | 300ms |
| 合计 ||| ~600ms |
总线负载约:60%
总线通讯帧率:1.2万帧/秒
可以看出升级到CANFD 1M/5M 波特率后,单路总线控制6电机也完全没有压力。
如果还是采用4条CANFD总线,剩余2条可以考虑接其他外挂的机械手等执行器,也可以考虑做控制冗余。