
我们正在研发一款能"自己找果、自己摘果"的智能采摘机器人。它融合了视觉识别和自动驾驶技术,能在果园里自由移动、精准定位成熟果蔬,并利用机械臂完成自动采摘。🌱
这意味着未来农场不再需要大量人工采摘,机器人就能在高温、雨天或夜间持续作业,极大提升效率与安全性。🤖
智慧农业正在加速到来,让科技真正"长在地里"!🚀
机器人人正悄然成长中,成为一枚农田勤劳的"新农人"。
深圳市普蓝机器人技术团队面向智慧农业场景,研发出一款融合"机器视觉、传感器技术、人工智能与自动驾驶系统"的智能果蔬采摘机器人,为传统农业注入科技动能。

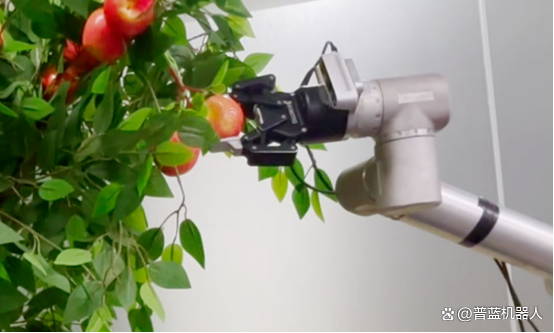
这台被称为"自主移动果蔬采摘机器人"的设备,不仅能够自主巡航、精准识果,还能灵巧地伸出机械臂完成抓取动作,实现从"发现"到"采摘"的全流程自动化作业。
智慧农业果树采摘机器人正在悄无声息重构农业生产的模式,让"智慧农田"真正落地。

一、智慧农田的新物种:让机器人成为真正的"农作助手"
传统果蔬采摘严重依赖人力,不仅成本高、效率低,还面临劳动力短缺与作业强度大的双重挑战。普蓝机器人决定自主研发果蔬采摘机器人正是针对这一痛点研发。
该机器人搭载了高性能工控机、激光雷达、深度视觉摄像头、高精度定位模块与多组传感器,通过自主计算与实时感知,能够在农田、果园、温室等复杂环境中稳定运行。它不仅能看清前方的路,还能识别果实的成熟程度、位置与采摘角度,实现高效、安全的自动作业。
这不仅是一次技术创新,更是农业生产方式的一次革新。机器人正逐渐成为智慧农业的重要科技设施。
二、自主导航:在复杂农田中"看清路、走得稳"
农田并非平坦的柏油路,而是坑洼不平、植被密集、光照复杂的自然环境。
普蓝机器人自主研发高精度导航与SLAM(同步定位与地图构建)系统,让采摘机器人在无外部定位信号弱的情况下,也能"认路前行"。
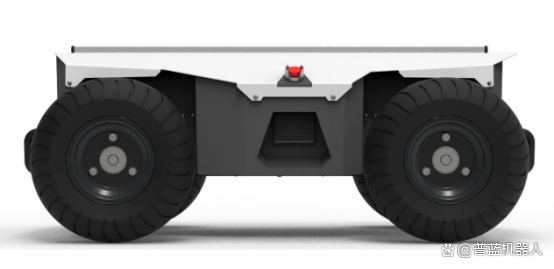
机器人移动底盘能够实时感知环境,自动规划最优路径,并灵活避开障碍物。无论是湿滑泥地还是狭窄通道,它都能精准控制车体保持稳定姿态,平稳运行。
在复杂地形中,机器人通过融合激光雷达与视觉导航的多传感器信息,实现厘米级定位精度,为果园作业提供可靠的自动驾驶能力。
这意味着,未来农田中的机器人不再需要人工遥控,而能像自动驾驶汽车一样,自主地行走与作业。
三、精准识别:让机器人拥有"农民的眼睛"
视觉识别,自主采摘成熟的果实,是采摘机器人核心功能之一。
普蓝机器人采用深度学习的机器视觉算法,结合高清摄像头与深度传感器,实现对果实颜色、形状、体积及光泽度的多维度识别。
通过模型训练,机器人可以区分成熟与未熟果实,甚至能够识别果实遮挡、重叠等复杂情况。
系统在采摘前会自动分析果实成熟度,并基于设定标准决定是否执行采摘动作。
这种"精准识果"的能力,不仅保证了采摘效率,也确保了采摘品质的稳定性。
相比传统人工采摘,机器人更客观、更持久,不受环境与疲劳影响,是智慧农业中最可靠的"识果专家"。
四、精准抓取:机械臂的"眼脑手"协作
采摘的最后一步,是抓取。看似简单的"伸手摘果",其实是机器人领域中最复杂的动作之一。
普蓝机器人配备了多自由度机械臂系统,具备自主运动规划与控制能力。
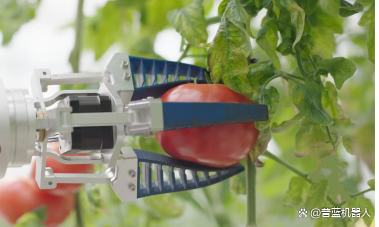
通过"力控 + 视觉引导 + 手眼协调"技术,机械臂能够根据果实位置自主规划路径,并实时调整角度与力度,做到"轻柔而精准"。
从正逆运动学到动力学建模,从关节空间到笛卡尔坐标系,机械臂能在空间中灵活移动,确保采摘动作既高效又安全。
无论是悬挂的西红柿、低位的草莓,还是枝繁叶茂中的苹果,机器人都能通过柔性末端执行器实现自然、无损的抓取。
力反馈系统让它像人类一样"有感觉" ,确保果实不被挤压、不被损伤,实现高质量采摘。

五、科研赋能农业:从实验室到田间地头
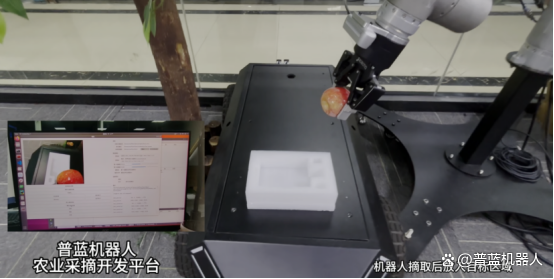
普蓝机器人的果蔬采摘机器人并非简单或传统的农业设备,而是一整套智能农业自动化科研平台 。
它兼容多种传感器接口与采摘算法,适合科研院校在农业机器人、计算机视觉、机械臂控制、路径规划与AI算法优化等方向开展研究。
通过持续的数据采集与算法迭代,机器人可以不断优化识别精度与作业路径,实现"边工作边学习"。
这不仅为农业自动化提供了可验证的实验基础,也推动了机器人技术在实际农业中的落地转化。
六、让科技真正生长在土地上
深圳市普蓝机器人技术团队在实现果蔬采摘作业的智能化、精准化与无人化。通过在感知、识别、导航与抓取等核心环节的技术创新,机器人能够在复杂农田环境中完成自主作业,为农业自动化与科研实验提供高效、可靠的技术支撑。
从视觉识别到自主导航,从机械臂控制到自动驾驶,普蓝果蔬采摘机器人集成了当下最前沿的智能技术,代表了智慧农业装备发展的新方向。
它不仅是科技的结晶,更是农业现代化的象征。
当机器人学会在田间行走、观察、采摘,我们看到的,不仅是科技改变农业的过程,更是人类与自然共生方式的进化。
未来,深圳市普蓝机器人将继续以科研为驱动,让科技真正"扎根土地",让每一片农田都能拥有智慧的力量。