
本代码实现了在二维空间中使用四个锚点进行单目标定位的GDOP(几何定位精度)和CRLB(克拉美罗下界)计算。通过网格扫描法,计算不同位置的GDOP,并以等值线图的形式进行可视化。同时,代码还计算了目标真实位置的理论CRLB,从而评估定位精度。该方法为定位系统的性能评估提供了重要的理论依据。
文章目录
以下是一个基于MATLAB的二维定位GDOP和CRLB计算示例,适用于单目标和四锚点场景。代码结合TDOA定位原理,包含GDOP等值线可视化:
matlab
% 二维定位GDOP与CRLB计算(单目标,四锚点)
% 2025-03-09/Ver1
%% 参数设置
clear; clc; close all;
rng(0); % 固定随机种子
% 锚点配置(正方形布局)
anchorPos = [0, 0; % 锚点1
100, 0; % 锚点2
100, 100; % 锚点3
0, 100]; % 锚点4 (单位:米)
% 目标真实位置
truePos = [60, 40]; % 测试目标位置
% 测量误差参数运行结果:
代码下载链接:
https://download.csdn.net/download/callmeup/92201448
关键说明:
-
GDOP计算原理
- 通过网格扫描生成测试点网格(-50m到150m)
- 构建几何矩阵H,计算费舍尔信息矩阵(FIM)的逆矩阵
- GDOP定义为协方差矩阵迹的平方根: G D O P = t r ( C R L B ) GDOP = \sqrt{tr(CRLB)} GDOP=tr(CRLB)
-
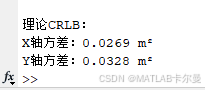
CRLB理论计算
- 基于真实目标位置计算雅可比矩阵
- 使用克拉美-罗下界公式: C R L B = F I M − 1 CRLB = FIM^{-1} CRLB=FIM−1
-
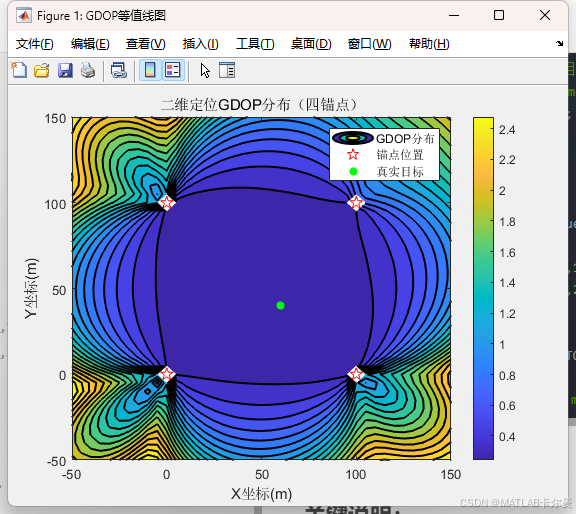
可视化功能
- 生成GDOP等值线图,直观显示不同区域定位精度
- 红色三角形标注锚点位置,绿色星号表示目标真实位置
运行结果说明
- GDOP分布图显示锚点布局对精度的影响,最小GDOP通常出现在锚点包围区域中心
- CRLB输出给出理论最小位置方差,可作为算法性能评估基准
更多定位相关代码,见专栏文章:
https://blog.csdn.net/callmeup/category_12794805.html
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者