介绍:接上一章节。本章节重点介绍如何在 STM32C8T6 上实现 PWM 驱动直流电机 的控制。通过按键输入实现控制逻辑,利用 PWM(脉宽调制)信号调节电机转速,并根据需求改变电机的转动方向,从而完成简易电机控制系统的构建与应用实践。
目录
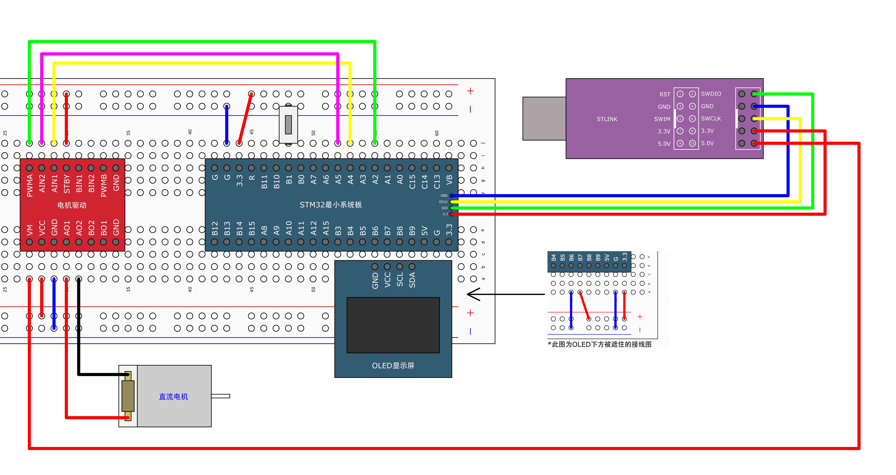
一、接线图
二、TB6612说明
由于直流电机属于大功率器件,STM32 的 GPIO 引脚无法直接提供足够的驱动电流,因此必须借助专用的电机驱动芯片进行功率放大和方向控制。我们选择使用 TB6612 驱动模块,它是一款性能稳定的双路 H 桥直流电机驱动芯片,可同时驱动两台直流电机,并支持正反转与转速调节等功能。
TB6612 不仅具有较高的输出电流能力,还具备低功耗、响应速度快等优点,非常适合与 STM32 进行配合使用。在控制方式上,我们通过 STM32 的 PA4 和 PA5 引脚输出高低电平 来切换电机的转动方向,同时利用 PWM 输出并修改 CCR 寄存器的值 调整 PWM 占空比,实现对电机转速的精准控制。因此,TB6612 既保证了系统的安全性和可靠性,又大大简化了电机控制的硬件设计。
三、相关代码编写
1.初始化:
void Motor_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
PWM_Init();
}2.直流电机速度设置(正反直接可以定义)
void Motor_SetSpeed(int8_t Speed)
{
if (Speed >= 0)
{
GPIO_SetBits(GPIOA, GPIO_Pin_4);
GPIO_ResetBits(GPIOA, GPIO_Pin_5);
PWM_SetCompare3(Speed);
}
else
{
GPIO_ResetBits(GPIOA, GPIO_Pin_4);
GPIO_SetBits(GPIOA, GPIO_Pin_5);
PWM_SetCompare3(-Speed);
}
}3.主函数示例
int main(void)
{
OLED_Init();
Motor_Init();
Key_Init();
OLED_ShowString(1, 1, "Speed:");
while (1)
{
KeyNum = Key_GetNum();
if (KeyNum == 1)
{
Speed += 20;
if (Speed > 100)
{
Speed = -100;
}
}
Motor_SetSpeed(Speed);
OLED_ShowSignedNum(1, 7, Speed, 3);
}
}四、程序现象
本程序的运行效果为:每次按下按键,直流电机的转速都会逐级提升;当转速达到设定阈值后,系统会自动切换电机的转动方向,并从较低转速重新开始递增,实现正反转循环控制的效果。
At the end of this article, applaud yourself again!!