注:本文参考课件来自 CMU
代码参考:https://github.com/Liwx1014/HikDualCamera_Stereo/blob/main/stereo_rectification.py
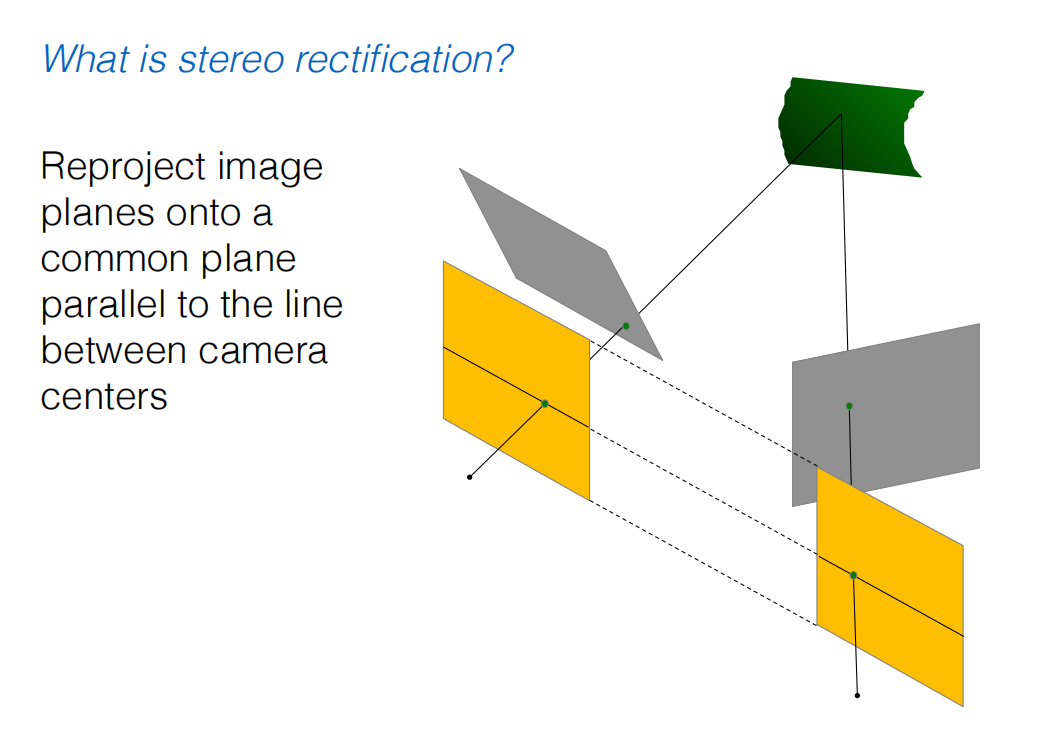
什么是立体矫正
立体矫正的前提条件
- 为了实现几何上最精确、最理想的立体矫正(如课件中描述的流程),前提条件是需要知道两个相机的内参。
- 即使完全不知道内外参数,也有一种方法可以进行矫正,尽管其结果在几何意义上不那么"纯粹"。
情况一:已校准的相机 (Calibrated Case) - 需要内参
这正是CMU课件中隐含的标准流程。
- 需要什么参数?
- 内参矩阵 K (Intrinsic Matrix) :你必须知道两个相机各自的 内参矩阵
K。这个矩阵包含了相机的焦距 (fx,fy)、主点坐标 (cx,cy) 和像素的倾斜因子。这些参数通常通过一次性的相机标定过程(例如使用棋盘格)来获得。
- 内参矩阵 K (Intrinsic Matrix) :你必须知道两个相机各自的 内参矩阵
- 为什么需要内参?
- 为了计算基础矩阵 E (Essential Matrix) :矫正流程的第一步是计算
E。E矩阵的定义是建立在归一化图像坐标系 下的,这个坐标系是一个与像素无关的、以米为单位的度量空间。要将像素坐标(u, v)转换到归一化坐标,就必须使用内参矩阵K的逆矩阵:x_normalized = K⁻¹ * x_pixel。 - 为了进行精确的分解 :只有从
E矩阵分解,才能得到真实的、具有物理意义 的相对旋转矩阵R和(单位化的)平移向量T。这些都是三维欧几里得空间中的变换。 - 为了生成最终的变换 :在最后一步应用变换时,我们计算的单应性矩阵
H = K * R_rect * K⁻¹也依赖于K。这个变换确保了矫正过程是一个纯粹的"虚拟相机旋转",能够保持场景的几何结构(例如直线仍然是直线)。
- 为了计算基础矩阵 E (Essential Matrix) :矫正流程的第一步是计算
- 流程总结 (已校准) :
像素点 -> (需要 K) -> 归一化点 -> (8点法) -> E矩阵 -> (分解) -> R, T, R_rect -> (需要 K) -> 最终矫正图像
所以,在这种最标准、效果最好的方法中,内参是绝对必要的 。而外参(两个相机间的相对R和T)是作为流程的一部分被计算出来的,你不需要提前知道。
情况二:未校准的相机 (Uncalibrated Case) - 可以不需要内外参
如果你的相机没有经过标定,完全不知道内参 K 怎么办?还能进行矫正吗?
答案是:可以 ,但我们处理的对象不再是 E 矩阵。
- 核心变成基本矩阵 F (Fundamental Matrix) :
- 在不知道内参的情况下,八点法计算出的不再是
E矩阵,而是基本矩阵 F 。F矩阵直接关联两个视图的像素坐标 ,它的约束方程是x'_pixelᵀ * F * x_pixel = 0。 F和E的关系是F = K'⁻ᵀ * E * K⁻¹。可以看到,F包含了E(几何关系) 和K,K'(相机内部投影特性) 的所有信息。
- 在不知道内参的情况下,八点法计算出的不再是
- 如何用 F 进行矫正?
- 即使只有
F,我们仍然可以计算出极点 e (通过求解Fe = 0)。 - 既然有了极点,我们就可以构建一个投影变换矩阵 H (而不是一个纯粹的旋转矩阵),这个变换同样可以将极点
e映射到无穷远处(1, 0, 0)。 - 将这个投影变换
H应用于两幅图像,同样可以使极线变成水平。
- 即使只有
- 这种方法的优缺点是什么?
- 优点:非常灵活,你不需要对相机进行任何预先的标定。只要能找到8对以上的匹配点,就能完成矫正。
- 缺点 :
- 产生投影畸变 :因为应用的变换
H是一个普适的投影变换,它不保证是纯粹的旋转。因此,矫正后的图像可能会出现更多的透视畸变。例如,图像中的正方形可能不再是正方形。 - 无法恢复真实尺度 :从
F无法直接分解出度量意义上的R和T。因此,后续计算出的视差图,虽然可以反映深度的相对关系,但很难恢复出具有真实物理单位(如米)的深度值。
- 产生投影畸变 :因为应用的变换
结论与总结
| 特性 | 已校准方法 (使用 E) | 未校准方法 (使用 F) |
|---|---|---|
| 核心矩阵 | 基础矩阵 (Essential Matrix) E |
基本矩阵 (Fundamental Matrix) F |
| 前提条件 | 需要两个相机的内参矩阵 K | 不需要任何相机参数 (只需要点匹配) |
| 计算对象 | 归一化图像坐标 | 像素坐标 |
| 矫正变换类型 | 纯旋转 (欧几里得变换) | 投影变换 (Homography) |
| 矫正后图像质量 | 几何失真小,更"自然" | 可能引入更多透视畸变 |
| 后续应用 | 可进行度量三维重建 | 主要用于计算视差,进行相对深度估计 |
总而言之,要实现课件中那种高质量、几何精确的立体矫正,前提就是已经通过相机标定获取了两个相机的内参矩阵 K。 这是在学术研究和工业应用(如自动驾驶、高精度测量)中的首选方法。
立体矫正的总体目标
在开始之前,我们再次明确立体矫正目标:通过对两幅原始图像进行透视变换(主要是旋转),生成两幅新的、经过矫正的图像。在新图像中,任何一个3D点在两幅图上的投影都位于同一水平线上。

上图:未校正,对应点不匹配。右图:矫正后的图像对,所有对应点都位于水平的极线上。

立体矫正算法详解
第一步:估算基础矩阵 E (Estimate E)
- 任务 : 找到描述两个摄像头坐标系之间几何关系的基础矩阵E (Essential Matrix)。
- 原理 : 基础矩阵
E是一个3x3的矩阵,它蕴含了两个摄像头之间的全部相对位姿信息,即旋转矩阵 R 和 平移向量 T 。它通过一个被称为极线约束 的核心方程x'^T * E * x = 0来连接左右图像中的对应点x和x'。 - 方法 : 如课件所述,通常使用 "八点法" (8-point algorithm) 。你需要从两张图片中找出至少8对可靠的匹配点。将这8对点的坐标代入极线约束方程,你就能得到一个线性方程组。通过奇异值分解 (SVD) 求解这个方程组,可以得到最符合所有匹配点的基础矩阵
E。SVD在这里的作用是找到在有噪声情况下最稳健的解。 - 输入: 至少8对在左右图像中匹配的像素点坐标。
- 输出 : 3x3的基础矩阵
E。
第二步:估算极点 e (Estimate the epipole e)
- 任务 : 找到极点 e。极点是一个摄像头的光心在另一个摄像头成像平面上的投影。它是所有极线的汇聚点。
- 原理 : 根据基础矩阵的定义,极点
e位于E的零空间中,满足方程Ee = 0。我们的目标是把这个点"推"到无穷远处,从而让所有汇聚于此的极线变得相互平行。 - 方法 : 同样地,通过对
E进行奇异值分解 (SVD) ,可以非常容易地找到它的零空间,从而解出极点e的坐标。 - 输入 : 基础矩阵
E。 - 输出 : 极点向量
e。
第三步:根据极点 e 构建矫正旋转矩阵 R_rect (Build R_rect from e)
- 任务 : 这是矫正过程的核心。我们需要构建一个旋转矩阵
R_rect,它能将当前的摄像头坐标系旋转到一个新的、"已矫正"的坐标系。在这个新坐标系里,原来的极点e会被旋转到(1, 0, 0)方向,也就是新的X轴的无穷远处。 - 原理与方法 (参考课件第42页):
- 定义新的X轴 (r₁) : 让新的X轴方向直接指向原来的极点方向。因此,
r₁就是单位化的极点向量e。r₁ = e / ||e||。 - 定义新的Y轴 (r₂) : 新的Y轴必须与新的X轴
r₁垂直。一个巧妙的构造方法是取r₁与原始坐标系Z轴(通常是光轴方向[0, 0, 1]^T)的叉乘。这会产生一个同时垂直于r₁和原始Z轴的向量,确保了新的Y轴是水平的。 - 定义新的Z轴 (r₃) : 新的Z轴必须同时垂直于新的X轴和Y轴。通过计算
r₃ = r₁ × r₂即可得到,这样(r₁, r₂, r₃)就构成了一个标准正交基(一个旋转矩阵的行或列)。
- 定义新的X轴 (r₁) : 让新的X轴方向直接指向原来的极点方向。因此,
- 输入 : 极点向量
e。 - 输出 : 3x3的矫正旋转矩阵
R_rect。
第四步:将 E 分解为 R 和 T (Decompose E into R and T)
- 任务 : 从我们第一步得到的基础矩阵
E中,分解出原始两个摄像头之间的相对旋转矩阵R 和平移向量T。 - 原理 : 基础矩阵
E本身是由R和T构成的 (E = [T]_× R)。通过对E进行SVD,可以反解出R和T。需要注意的是,分解会产生四组可能的(R, T)解,你需要通过一些额外的几何约束(例如,将一个3D点投影到两个相机中,确保它在两个相机的前方)来确定唯一正确的解。 - 输入 : 基础矩阵
E。 - 输出 : 原始的相对旋转矩阵
R和平移向量T。
第五步:设置左右相机的最终矫正矩阵 (Set R₁ and R₂)
- 任务: 确定最终要应用到左右两幅图像上的总旋转量。
- 原理 :
- 左相机 : 它只需要进行矫正旋转即可。所以,左相机的最终旋转矩阵
R₁ = R_rect。 - 右相机 : 为了与矫正后的左相机对齐,右相机需要进行两步旋转:首先,它需要应用原始的相对旋转
R来和左相机的原始姿态对齐;然后,再和左相机一样,应用矫得旋转R_rect。因此,右相机的最终旋转矩阵R₂ = R_rect * R。
- 左相机 : 它只需要进行矫正旋转即可。所以,左相机的最终旋转矩阵
- 输入 :
R_rect和R。 - 输出 : 左相机的矫正矩阵
R₁和右相机的矫正矩阵R₂。
第六、七、八步:应用变换,生成新图像 (Warp images)
- 任务 : 将原始图像的每个像素根据
R₁和R₂变换到新的矫正图像平面上。这个过程也叫图像 warping。 - 原理 : 我们不能简单地移动像素。正确的做法是:
- 创建一个空白的矫正后图像。
- 遍历新图像中的每一个像素
p'。 - 将这个像素
p'的坐标通过其对应的逆旋转矩阵 (R₁⁻¹或R₂⁻¹) 变换回原始相机的坐标系中。 - 将变换后的坐标投影到原始图像上,找到对应的源像素
p。 - 由于
p的坐标很可能不是整数,需要使用双线性插值等方法来计算其精确的颜色值。 - 将这个颜色值赋给新图像的像素
p'。
- 方法 (更实用) : 如课件第47页所述,这个过程在实践中通常通过计算一个单应性矩阵 H (Homography Matrix) 来完成。对于左相机,
H₁ = K * R₁ * K⁻¹,其中K是相机的内参矩阵。这个H₁矩阵可以直接将原始左图的像素坐标映射到矫正后左图的像素坐标。对右相机也同理 (H₂ = K * R₂ * K⁻¹)。然后使用这个单应性矩阵来"扭曲"原始图像,生成矫正后的图像。 - 输入 : 原始左右图像,
R₁,R₂,以及相机内参矩阵K。 - 输出: 两幅已经过立体矫正的、极线水平对齐的新图像。
完成以上所有步骤后,我们就得到了一对理想的立体图像,可以非常高效地进行下一步的立体匹配 (Stereo Matching),从而计算出密集的深度图。
当对原始左右图像进行立体矫正后,实际上是创建了一个新的、理想化的虚拟立体相机。在这个虚拟系统中,左右两个相机的是平行的,成像平面是共面的。两个虚拟相机的内参矩阵变得完全相同,基线则在物体世界中定义,两个原始相机之间的光心距离,这个值在矫正中不会改变,通常从平移向量中计算而来。
工程实践-如何处理不完美
处理不完美的矫正(即存在垂直偏移)是工程实践中必须面对的挑战。一个鲁棒的双目测距系统不会假设矫正是完美的,而是会建立一套"多层防御"体系来应对这个问题。
以下是在整个双目测距流程中,从前到后可以采取的改进措施,分为预防、适应、修复三个层次。
层次一:预防------从根源上最小化垂直偏移
这是最重要、最有效的一步。与其下游补救,不如上游根治。
- 进行超高精度的相机标定 :
- 增加标定图像数量和质量:使用几十张甚至上百张清晰、光照均匀、无运动模糊的图像。确保标定板出现在视野的各个角落和不同深度,因为镜头畸变在图像边缘最严重。
- 使用高精度标定板:确保标定板本身是平的,打印精度高。
- 优化畸变模型 :除了标准的5个畸变参数(
k1, k2, p1, p2, k3),可以考虑使用包含更高阶径向畸变(k4, k5, k6)的模型,特别是对于广角镜头,这能显著减少边缘的残余畸变。 - 全局优化 (Bundle Adjustment):使用"光束法平差"来同时优化所有内外参,最小化全局重投影误差,这能得到最一致、最精确的参数。
- 保证硬件平台的刚性与同步 :
- 刚性连接:使用坚固的金属支架固定两个相机,并在设计上考虑抗振动和热胀冷缩,确保它们的相对位姿在标定后不会改变。
- 硬件同步:必须使用硬件触发来保证两个相机的快门在微秒级别上同步。对于动态场景,任何不同步都会引入额外的、看似垂直偏移的误差。
层次二:适应------让立体匹配算法更"宽容"
即使做到了最好的预防,微小的误差(例如0.5个像素)可能依然存在。下一步是让核心的立体匹配算法能够容忍这些误差。
- 对于传统算法 (如SGM, Block Matching) :
- 二维搜索窗口:这是最核心的改进。放弃严格的1D水平线搜索,改为在一个小的2D矩形区域内搜索。
- 具体实现 :对于左图的点
(x, y),在右图的搜索区域从[x_min, x_max]的一条线,扩展为[x_min, x_max] × [y - N, y + N]的一个矩形。 - N的取值 :
N是你预估的最大垂直偏移量,通常设为1或2个像素。设置得太大,会急剧增加计算成本和误匹配的概率;设置得太小,则无法容忍误差。这是一个需要权衡的参数。 - 代价 :计算复杂度会乘以
(2N+1)倍,对实时性是巨大挑战。
- 对于深度学习算法 (如RAFT-Stereo) :
- 模型微调 (Finetuning) :这是非常有效的方法。创建一个包含不完美矫正的合成数据集 。你可以通过对完美矫正的图像对施加一个微小的、随机的垂直仿射变换来模拟垂直偏移。然后,用这个新的"有噪声"的数据集对预训练好的模型进行微调。网络会学会对这种微小的垂直偏移变得不敏感。
- 修改网络结构:更高级的方法是修改网络结构,例如将相关性查询从1D(沿水平线)扩展到局部2D区域。但这需要对模型本身进行深入修改,难度较高。
层次三:修复------后处理阶段识别并剔除错误
匹配完成后,由垂直偏移导致的错误匹配通常会表现为一些"异常值"。我们可以通过后处理手段来识别和修复它们。
- 强化左右一致性检查 (Left-Right Consistency Check) :
- 这是对抗不完美矫正的最强防线。一个因垂直偏移产生的错误匹配,几乎不可能在反向检查中也得到一致的结果。
- 因此,当存在垂直偏移风险时,必须执行左右一致性检查,并将不一致的点标记为无效。
- 引入唯一性约束 (Uniqueness Constraint) :
- 在匹配成本计算中,如果最佳匹配成本与次优匹配成本非常接近,说明这个匹配是模糊的、不可靠的。这在重复纹理区域很常见,也可能由垂直偏移导致。
- 设定一个阈值,如果
(cost_second_best / cost_best) < threshold,则认为该匹配有效,否则视为无效。
- 使用更智能的滤波和空洞填充 :
- 剔除小连通域 (Speckle Filtering):由错误匹配产生的视差区域通常是孤立的小噪点。可以剔除掉所有面积小于某个阈值的连通区域。
- 边缘保持滤波 :在剔除大量无效点后,视差图上会出现很多"空洞"。使用边缘保持的滤波算法,如加权中值滤波 或引导滤波 (Guided Filter),利用原始彩色图像的边缘信息来智能地填充这些空洞。
高级策略:在线自校准
对于那些硬件无法保证长期稳定(如车载、无人机)的系统,最先进的解决方案是:
- 在线自校准 (Online Self-Calibration) :系统在运行过程中,持续地跟踪稀疏特征点(如ORB, SIFT)。通过分析大量特征点的长期运动,可以反向推断出相机外参(
R和T)是否发生了微小的漂移。如果检测到漂移,系统可以动态地更新矫正矩阵,从而实时补偿硬件变化带来的误差。这本质上是一个简化的视觉SLAM(同步定位与建图)过程。
推荐的改进流程
- 第一优先级 :重新进行一次超高精度的标定。这是投入产出比最高的一步。
- 修改匹配算法 :在立体匹配步骤中,将1D搜索改为2D搜索 ,但将垂直范围
N限制在1或2个像素,以平衡效果和性能。 - 必做后处理 :严格执行左右一致性检查,并结合剔除小连通域和边缘保持滤波,生成最终的视差图。
- 长期方案 :对于要求高鲁棒性的系统,考虑实现一个轻量级的在线自校准模块。
通过这套组合拳,即使面对不完美的矫正,你的双目测距系统也能表现得更加稳健和精确。