第四章:相机模块与云台模块
在第三章:任务管理器与航点任务/热点任务中,我们学会了如何为无人机规划复杂的自动化飞行路径
既然无人机已经能够自主飞行,那么它的"视觉"系统呢?如何让它拍照、录像或将相机指向特定方向?
这就是**相机模块(CameraModule)和云台模块(GimbalModule)**的用武之地!它们是无人机的"眼睛"和"颈部",让你能够通过编程控制相机及其稳定云台。
什么是"相机模块"和"云台模块"?(无人机的视觉与指向控制系统)
想象你的无人机配备了一个连接在可移动头部(云台)上的高品质相机。你有一个相机控制面板,上面有"拍照"、"开始录像"、"调整曝光"等按钮,以及变焦旋钮。
你还有另一个云台控制面板,可以俯仰、平移或复位云台位置。
在Onboard-SDK中,CameraModule和GimbalModule对象正是这些专属控制面板。
-
CameraModule:代表无人机上的单个相机,提供所有相机专属功能的控制权,例如:- 拍照(单张、连拍、间隔拍摄)
- 录像
- 调整曝光参数(ISO、快门速度、光圈、EV值)
- 控制变焦
- 设置对焦
-
GimbalModule:代表单个云台(固定相机的机械稳定器),可精确控制相机朝向,例如:- 旋转相机(俯仰、横滚、偏航)
- 将云台复位到默认位置
为什么需要这些模块?
现代大疆无人机可能配备多个相机和云台(例如主相机、热成像相机或上视相机,各带独立云台)。CameraModule和GimbalModule为每个设备提供了清晰独立的接口。
这些模块由两个更高级的组件管理:
CameraManager:统管所有CameraModule实例GimbalManager:统管所有GimbalModule实例
可以把CameraManager想象成主摄影部门,GimbalManager是主摄像部门。每个部门都有随时待命的专家(即各个CameraModule和GimbalModule对象)来执行具体指令。
第一个视觉任务:拍照并下视相机
让我们为无人机布置一个简单的视觉任务:用主相机拍摄单张照片,然后将相机向下倾斜
首先确保已准备好Vehicle对象(如第一章:飞行器所示)。本示例不需要飞行控制权限,因为相机/云台操作通常无需飞行权限(但如需边飞行边拍照则需获取权限)。
cpp
#include <dji_vehicle.hpp>
#include <dji_linux_helpers.hpp>
#include <dji_camera_manager.hpp> // CameraManager
#include <dji_gimbal_manager.hpp> // GimbalManager
#include <iostream>
// ... 在主函数中 ...
LinuxSetup linuxEnvironment(argc, argv);
DJI::OSDK::Vehicle* vehicle = linuxEnvironment.getVehicle();
if (vehicle == NULL) {
std::cout << "飞行器未初始化,退出。\n";
return -1;
}
// 假设已完成激活(如第一章所示)
// DJI::OSDK::ACK::ErrorCode activateAck = vehicle->activate(...);
// ... 错误检查 ...
int functionTimeout = 1; // SDK函数通用超时时间
// 主相机/云台通常位于PAYLOAD_INDEX_0
const DJI::OSDK::PayloadIndexType mainPayloadIndex = DJI::OSDK::PAYLOAD_INDEX_0;第一步:初始化相机和云台模块
使用相机或云台前,需要通过各自的管理器初始化其模块。这告诉SDK你要控制的具体设备。
cpp
// ... 飞行器初始化后 ...
// 从Vehicle获取CameraManager和GimbalManager
DJI::OSDK::CameraManager* cameraManager = vehicle->cameraManager;
DJI::OSDK::GimbalManager* gimbalManager = vehicle->gimbalManager;
// 初始化主相机模块
std::cout << "初始化主相机模块...\n";
DJI::OSDK::ErrorCode::ErrorCodeType cameraInitRet =
cameraManager->initCameraModule(mainPayloadIndex, "MyMainCamera");
if (cameraInitRet != DJI::OSDK::ErrorCode::SysCommonErr::Success) {
std::cout << "初始化相机模块失败!错误: " << std::hex << cameraInitRet << std::endl;
return -1;
}
std::cout << "主相机模块初始化完成。\n";
// 初始化主云台模块
std::cout << "初始化主云台模块...\n";
DJI::OSDK::ErrorCode::ErrorCodeType gimbalInitRet =
gimbalManager->initGimbalModule(mainPayloadIndex, "MyMainGimbal");
if (gimbalInitRet != DJI::OSDK::ErrorCode::SysCommonErr::Success) {
std::cout << "初始化云台模块失败!错误: " << std::hex << gimbalInitRet << std::endl;
return -1;
}
std::cout << "主云台模块初始化完成。\n";第二步:设置相机为拍照模式并拍摄单张照片
相机通常有"拍照"、"录像"或"回放"等模式。要拍照,我们需先确保相机处于SHOOT_PHOTO模式,然后发出SINGLE拍照指令。
cpp
// ... 模块初始化后 ...
// 设置相机工作模式为拍照
std::cout << "设置相机模式为拍照...\n";
DJI::OSDK::ErrorCode::ErrorCodeType setModeRet =
cameraManager->setModeSync(mainPayloadIndex, DJI::OSDK::CameraModule::WorkMode::SHOOT_PHOTO, functionTimeout);
if (setModeRet != DJI::OSDK::ErrorCode::SysCommonErr::Success) {
std::cout << "设置相机模式失败!错误: " << std::hex << setModeRet << std::endl;
return -1;
}
std::cout << "相机模式已设为拍照。\n";
sleep(1); // 给相机切换模式的时间
// 开始拍摄单张照片
std::cout << "拍摄单张照片...\n";
DJI::OSDK::ErrorCode::ErrorCodeType shootPhotoRet =
cameraManager->startShootPhotoSync(mainPayloadIndex, DJI::OSDK::CameraModule::ShootPhotoMode::SINGLE, functionTimeout);
if (shootPhotoRet != DJI::OSDK::ErrorCode::SysCommonErr::Success) {
std::cout << "拍照失败!错误: " << std::hex << shootPhotoRet << std::endl;
return -1;
}
std::cout << "照片已拍摄!请检查无人机SD卡。\n";
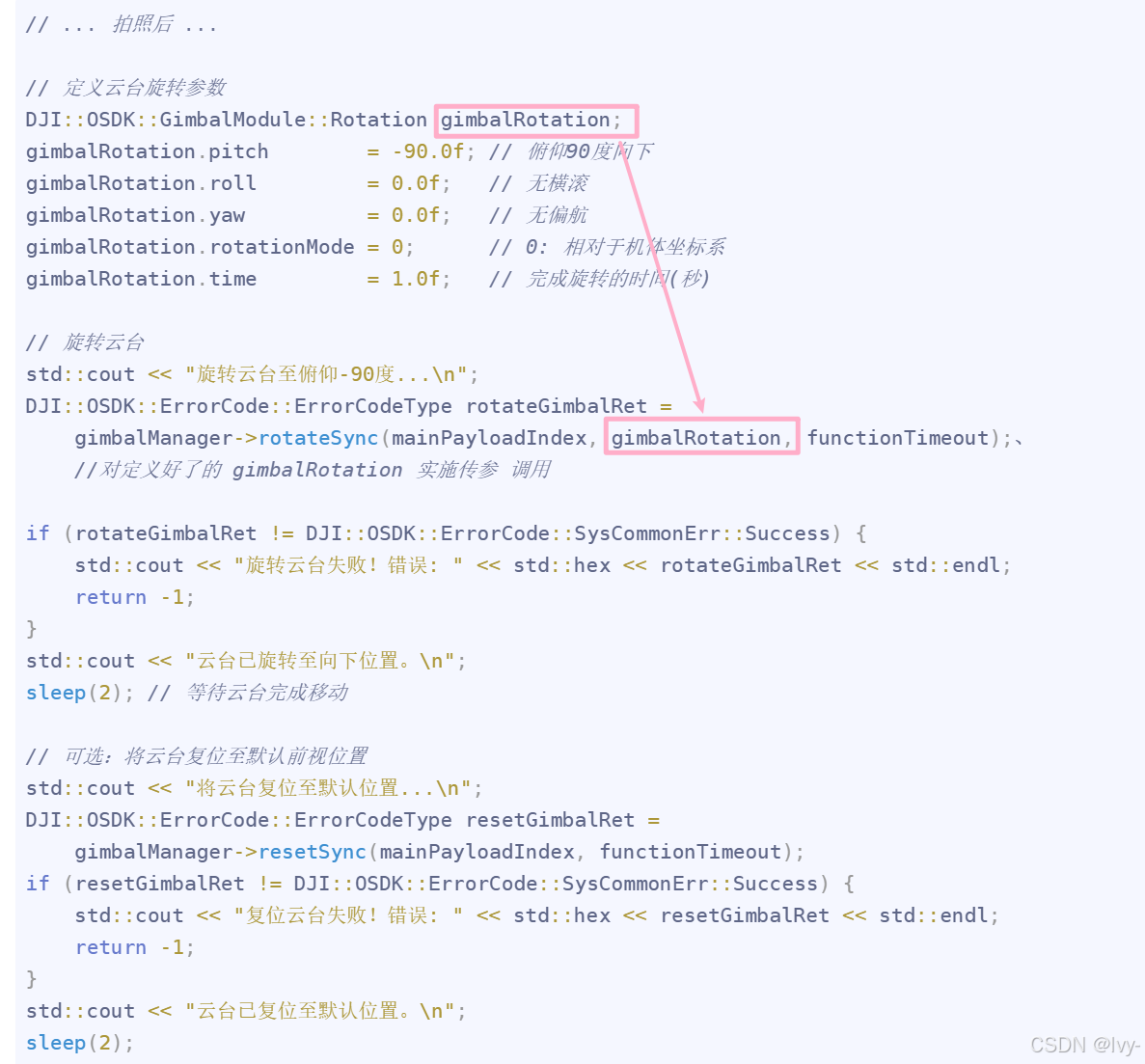
sleep(2); // 给无人机处理照片的时间第三步:旋转云台使相机向下
现在让我们控制云台使相机垂直向下。通常这是-90度的俯仰角。
内部机制:相机/云台模块如何通信
与其他核心SDK组件一样,CameraManager、GimbalManager及其各自的Module对象都由Vehicle对象精心协调,并依赖底层的连接器(Linker)与无人机硬件通信。
初始化流程
从第一章:飞行器可知,Vehicle::init()是主初始化器。它会创建相机和云台的管理器。
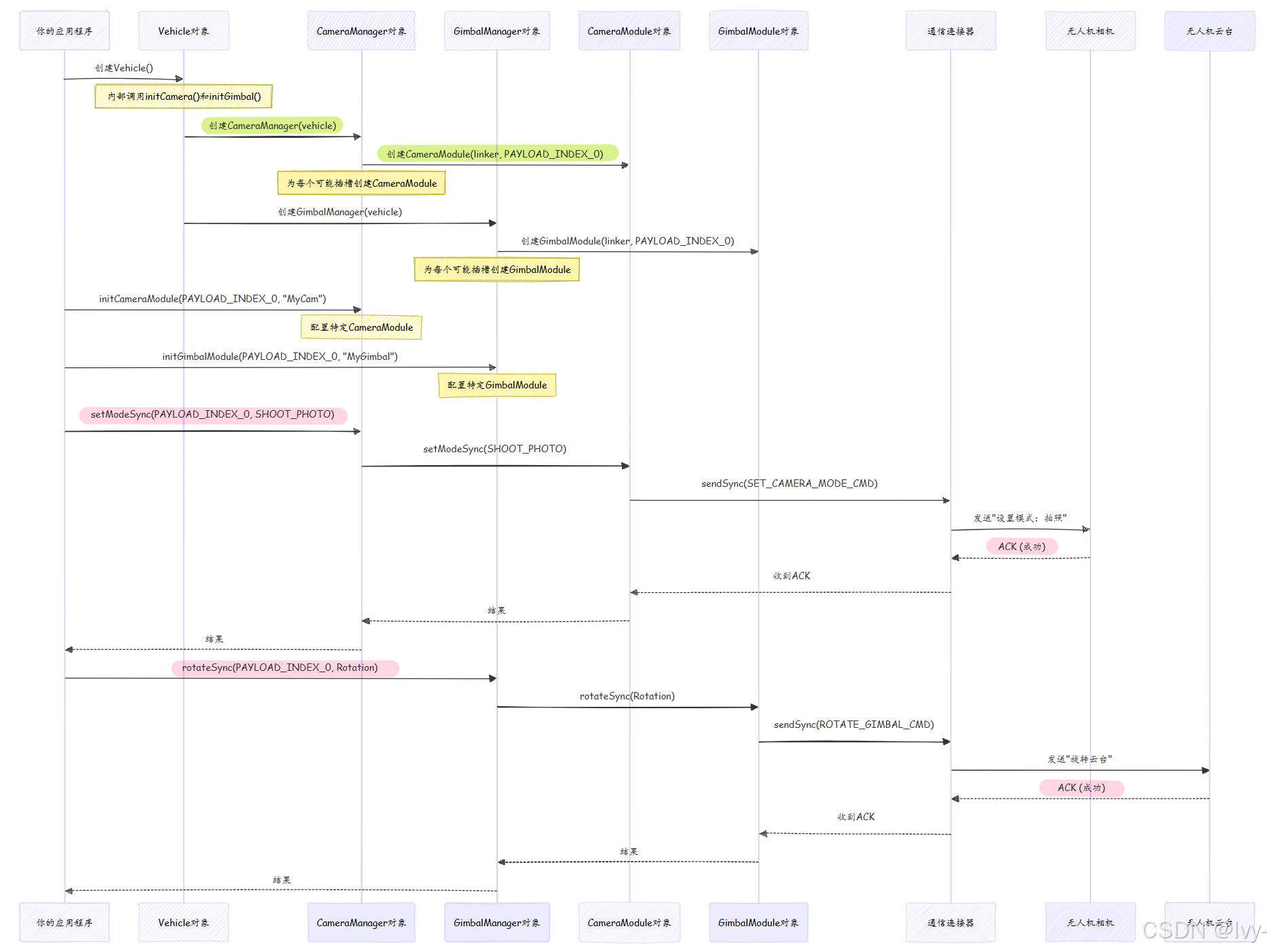
(层层封装调用 架构设计)
结论
CameraModule和GimbalModule是无人机实现视觉与指向控制的专业工具
-
通过与各自的管理器交互,可以精确控制拍照、录像、曝光参数、变焦和云台朝向。
-
这种模块化设计让你能轻松控制特定设备,实现高级成像与检测任务。
现在我们已经能够控制无人机飞行及其相机,接下来让我们探索如何获取超越基础遥测的高级感知能力