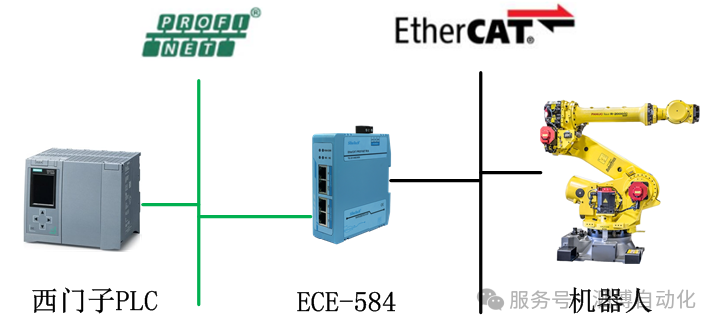
在智能产线中,跨协议设备的高效协同是一大难点。当产线中既有西门子PROFINET系统,又配有EtherCAT机器人(如FANUC、埃斯顿、汇川)时,协议壁垒使数据互通变得复杂。通常,机器人EtherCAT可分为主站与从站两种应用场景。当其作为从站时,可通过TEC-380网关轻松接入PROFINET网络;但当其作为EtherCAT主站时,如何与西门子PLC实现稳定、实时的数据交互?
这正是ECE-584网关的解决之道!!!!!
ECE-584的三大核心能力,直击痛点
- 双主站接入架构,快速搭建数据桥梁PROFINET网络: 作为PROFINET从站,可通过GSD文件被西门子PLC轻松集成到TIA Portal项目中EtherCAT网络: 作为EtherCAT从站,支持ESI一站式配置,方便与FANUC、埃斯顿、汇川等机器人控制器快速建立通讯
- EtherCAT协议兼容性,覆盖主流机器人品牌支持EtherCAT主站设备:完美适配FANUC、埃斯顿、汇川等主流机器人厂商的EtherCAT接口
- 高实时性与稳定性ECE-584采用西门子PROFINET芯片,数据交换<10ms,满足绝大多数工业场景对实时性的苛刻要求,保障生产线稳定、流畅运行
场景一:机器人状态监控与控制
PLC通过ECE-584,可以实时读取机器人的:
- 当前坐标、速度、扭矩、运行状态
- 报警代码与信息
同时,PLC可以实时向机器人下发:
- 启动、停止、复位
- 指令程序号选择
场景二:柔性化生产管理

当生产线上需要切换不同工件时,PLC只需通过ECE-584向机器人发送一个"配方号",机器人即可自动调用对应的加工程序,实现产线的快速换型,真正实现柔性制造