目录
[1.1 UdpServer类结构概要:](#1.1 UdpServer类结构概要:)
[1.2 主要成员函数讲解:](#1.2 主要成员函数讲解:)
[1.2.1 Init](#1.2.1 Init)
[(2)绑定(bind) socket](#(2)绑定(bind) socket)
[1.2.2 Run](#1.2.2 Run)
[2.1 概述过程:](#2.1 概述过程:)
[2.2 具体实现:](#2.2 具体实现:)
[2.2.2 接收信息 recv_message:](#2.2.2 接收信息 recv_message:)
[2.2.3 发送信息 send_message:](#2.2.3 发送信息 send_message:)
[3.1 打开服务端:](#3.1 打开服务端:)
[3.2 打开客户端:](#3.2 打开客户端:)
[3.3 展示通信效果:](#3.3 展示通信效果:)
1.服务端的实现Server:
1.1UdpServer类结构概要:
创建一个UdpServer类,其成员变量:
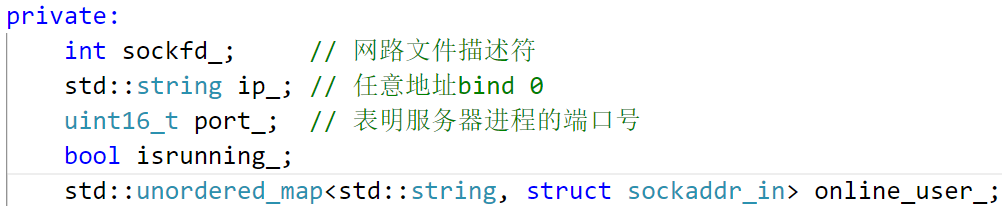
成员函数:
UdpServe ~UdpServe Init Run CheckUser Broadcat
1.2 主要成员函数讲解:
1.2.1 Init
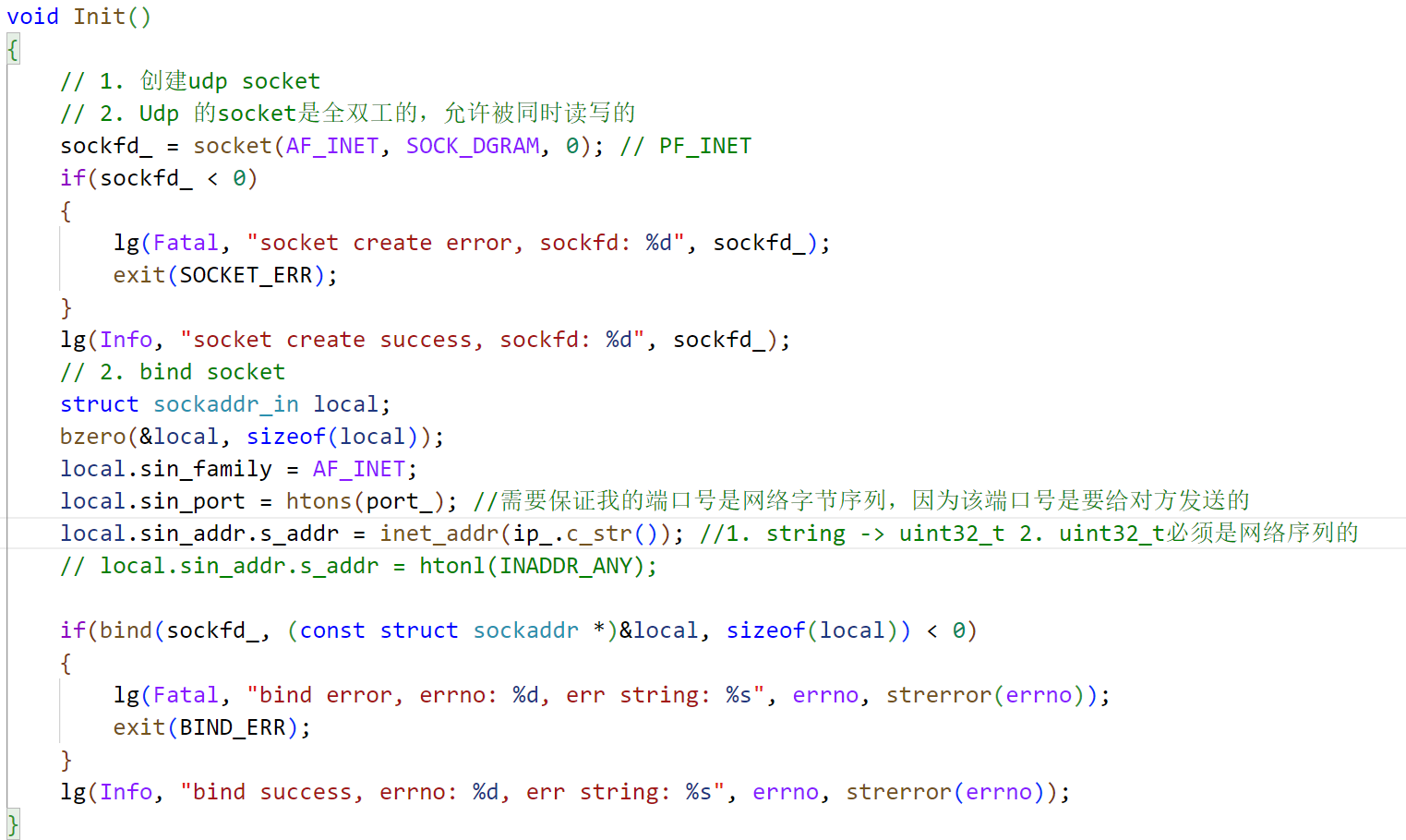
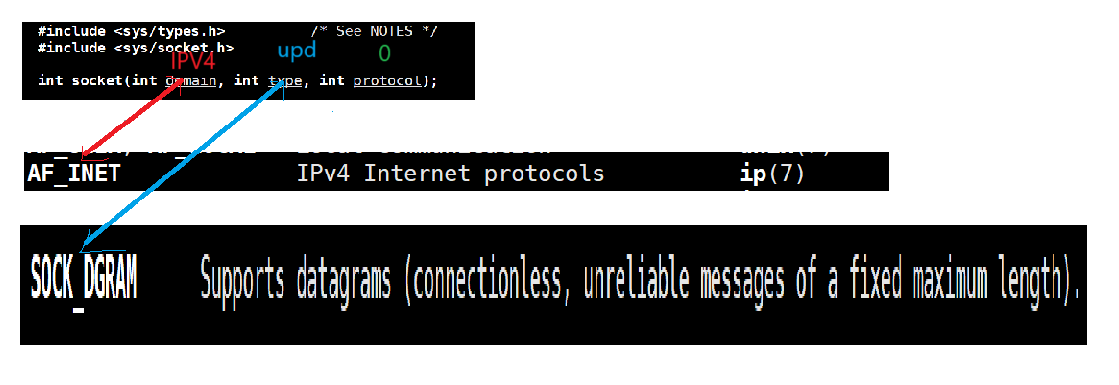
(1)创建udp_socket
(2)绑定(bind) socket
先初始化struct socketaddr_in local (sin_family sin_port sin_addr)
端口号和IP地址都要网络序列化(大端存储)
用到了htons()和inet_addr()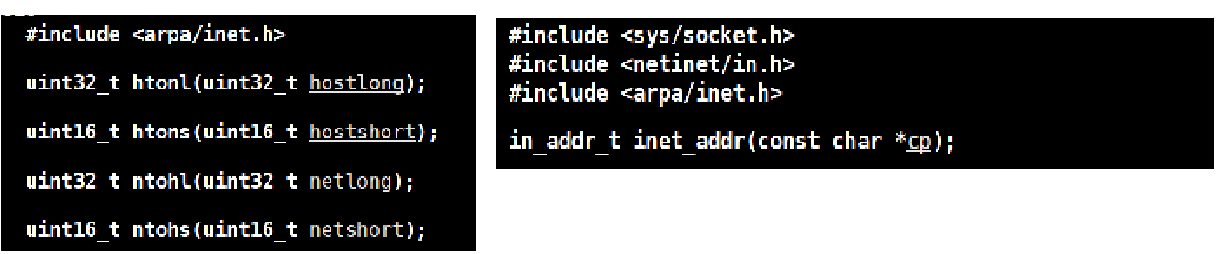
然后再bind

1.2.2 Run
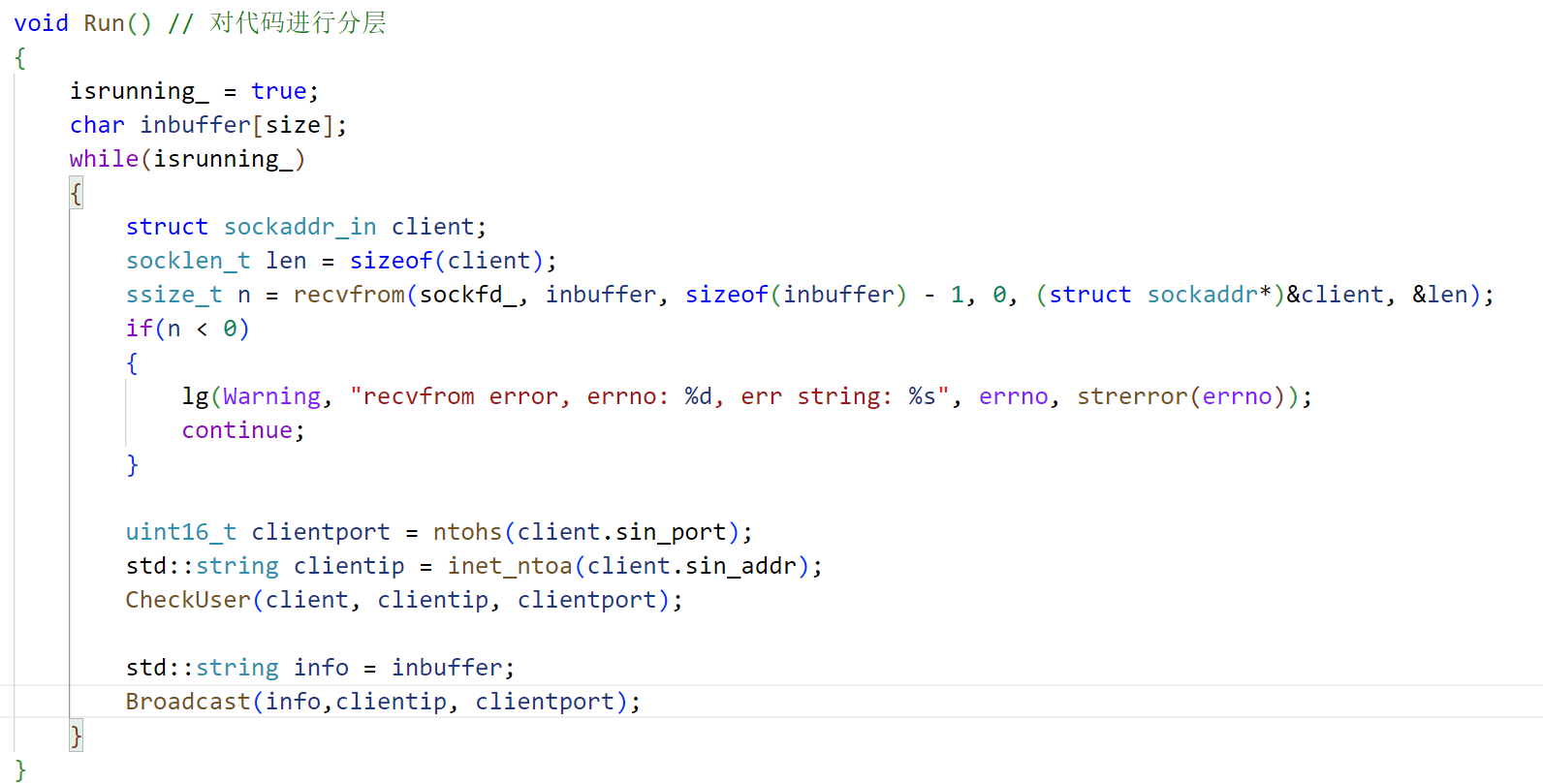
(1)接收客户端的消息:recvfrom

(2)检查用户是否第一次登入:CheckUser
通过unordered_map进行匹配查找。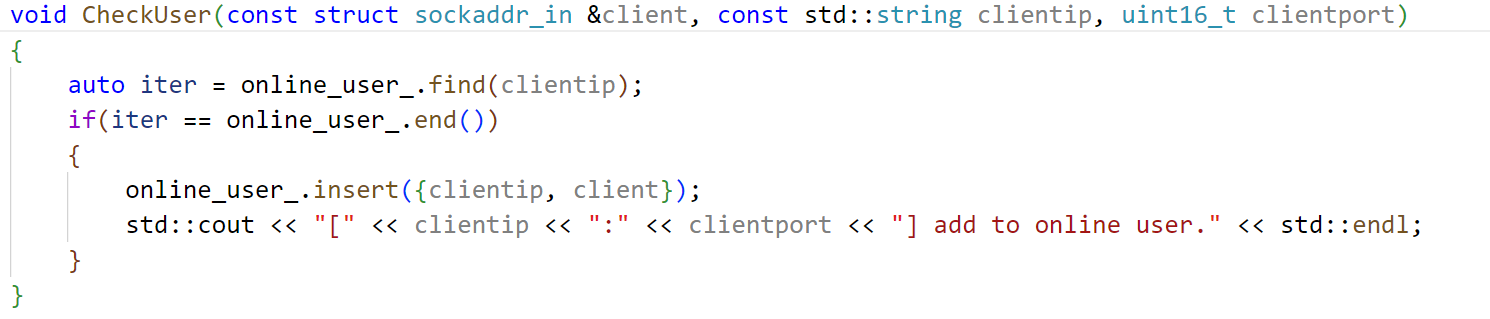
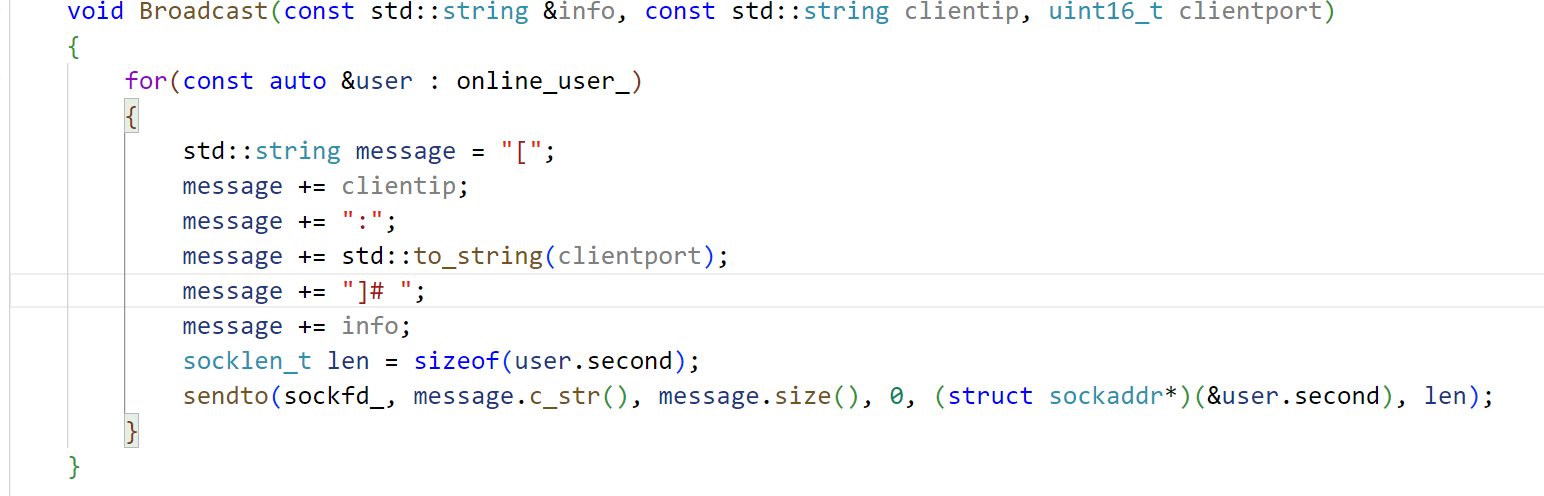
(3)广播消息:Broadcast
把接收到的消息发送给所有用户的客户端。
sendto() 发送消息给客户端
2.客户端的实现Client:
2.1 概述过程:
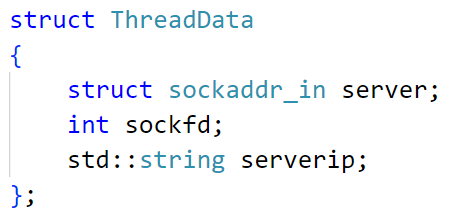
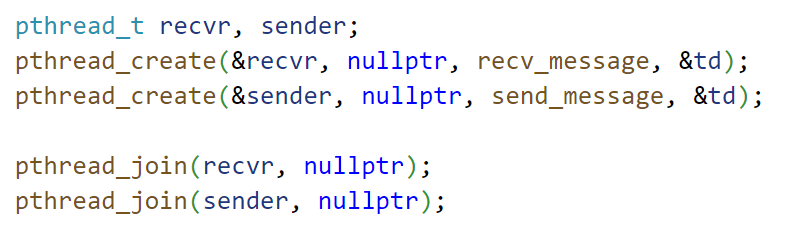
采用多线程的方式实现,客户端既可以发送消息,也能接收消息。所有创建了2个线程,并创建一个结构体【struct ThreadData】来描述线程信息。
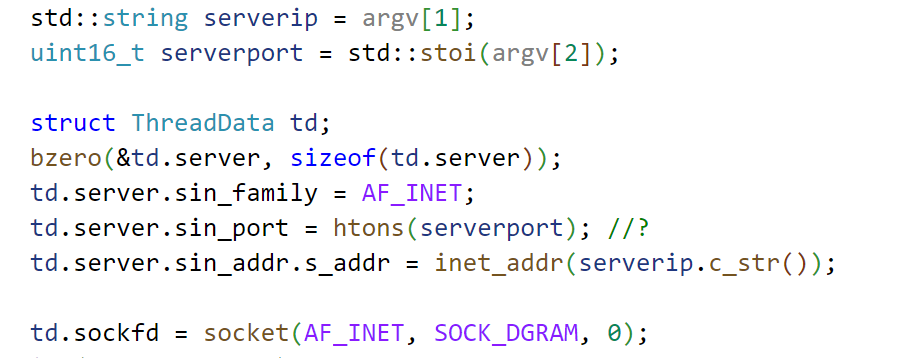
准备通信:还是和服务端一样创建socket,初始化服务端的各种成员,此处不需要手动bind,其客户端已经自动bind了。
然后让两个线程,一个发送信息,一个接收消息。
2.2 具体实现:
2.2.1 创建socke并初始化
2.2.2 创建线程:
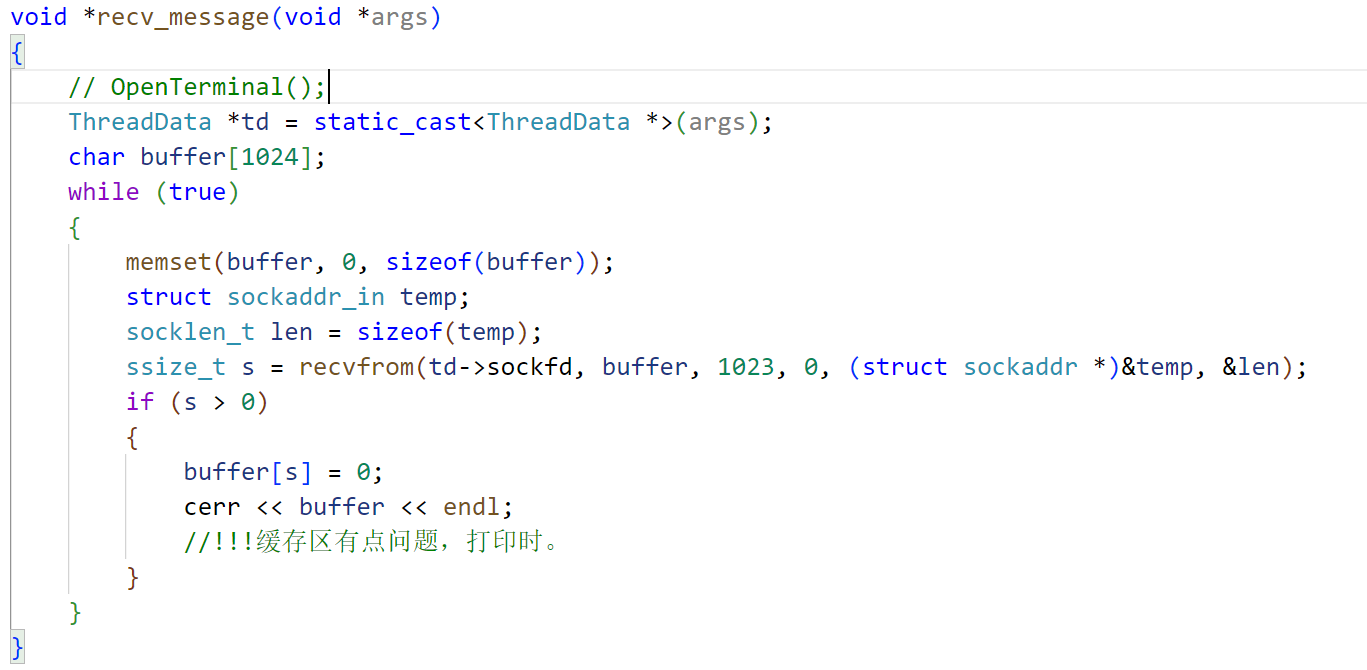
2.2.2 接收信息 recv_message:
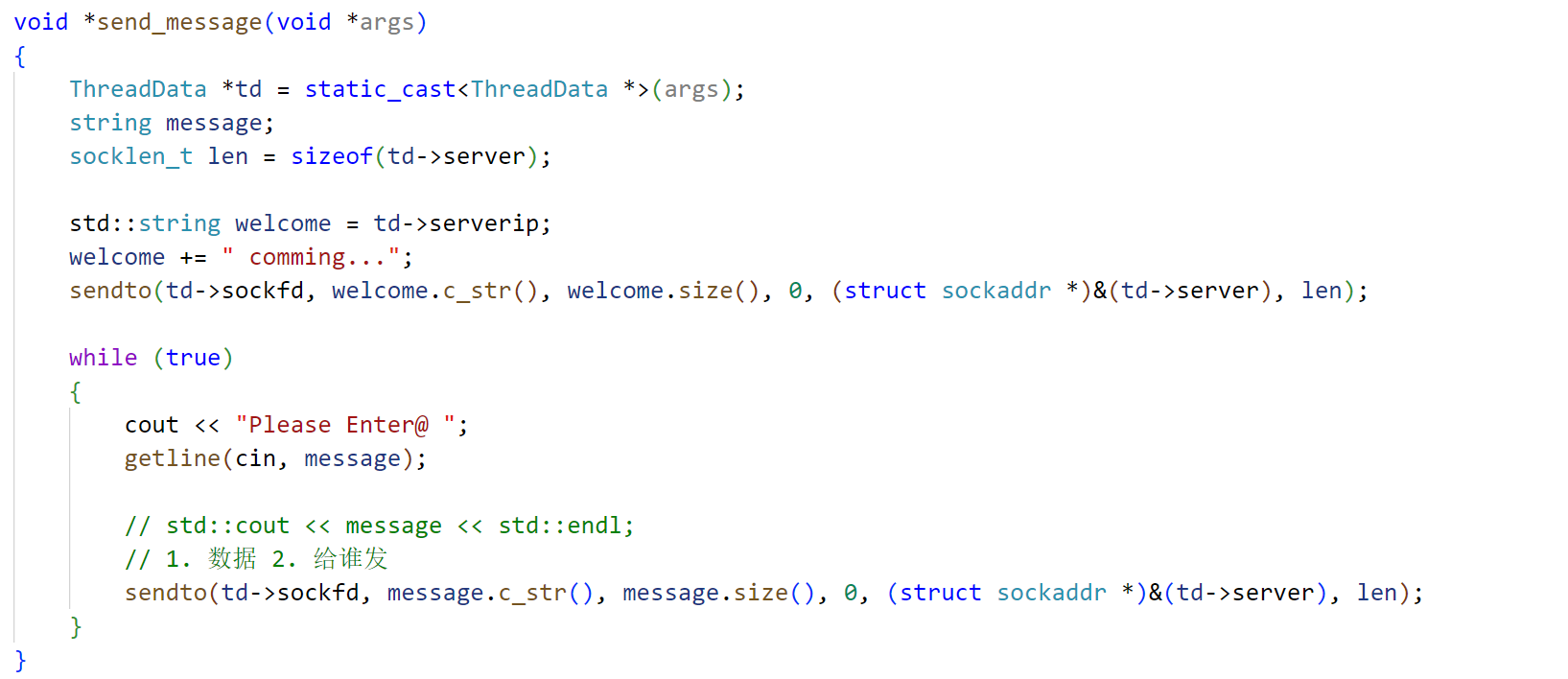
2.2.3 发送信息 send_message:
3.测试案例:
3.1 打开服务端:

3.2 打开客户端:
开启2个终端:【1】一个发送消息,【0】一个接收消息。
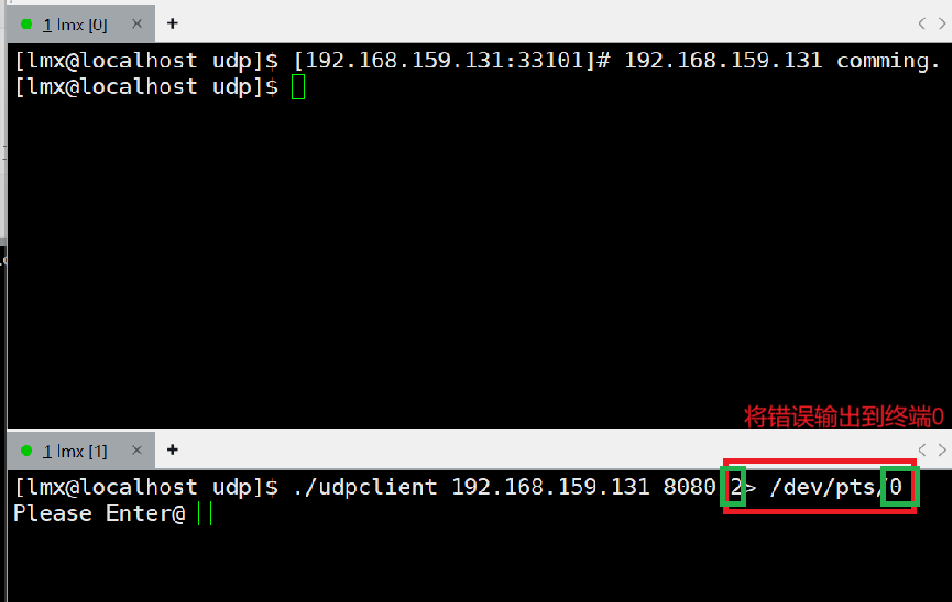
为什么要 2> 因为接收到消息后,打印到错误屏幕上,其文件描述符为2.

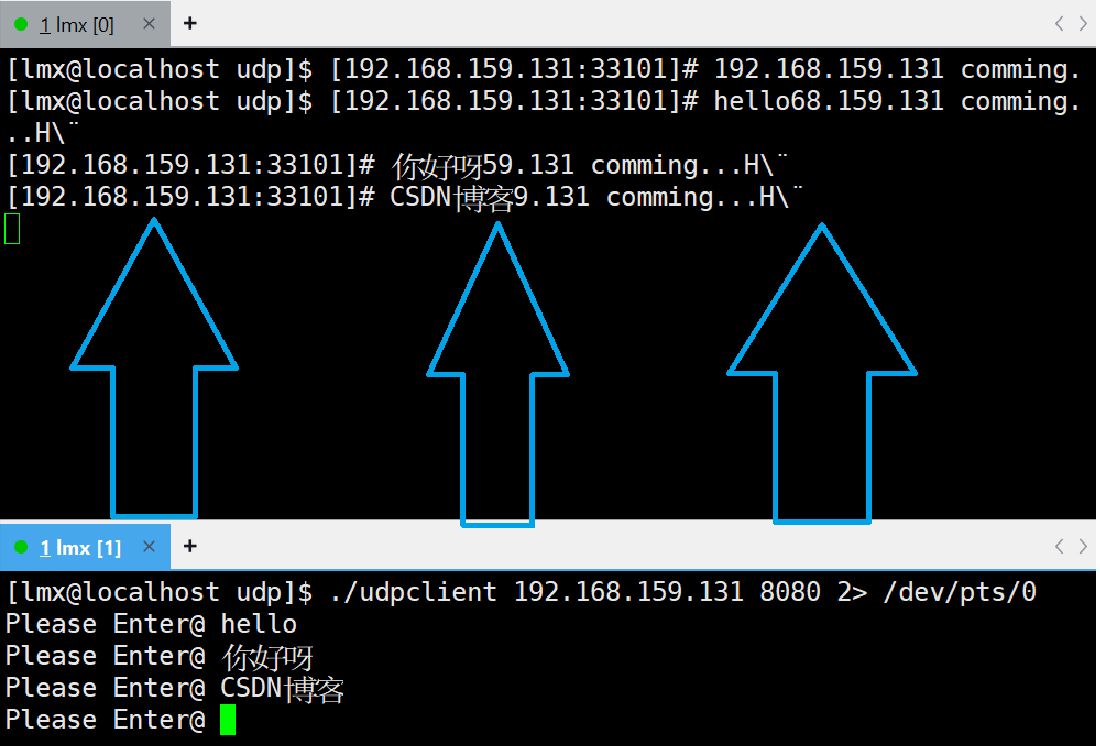
3.3 展示通信效果:
目前还存在终端缓存区问题。
4.完整代码:
全文代码:
