### 文章目录
- [@TOC(文章目录)](#文章目录 @TOC 前言 一、批处理法与递推法比较 二、递推最小二乘法 三、MATLAB实现 1.Step1 2.Step2 3.Step3 4.Step4 5.Step5andStep6 6.Step7 7.完整代码 四、结果展示)
- [前言](#文章目录 @TOC 前言 一、批处理法与递推法比较 二、递推最小二乘法 三、MATLAB实现 1.Step1 2.Step2 3.Step3 4.Step4 5.Step5andStep6 6.Step7 7.完整代码 四、结果展示)
- [一、批处理法与递推法比较](#文章目录 @TOC 前言 一、批处理法与递推法比较 二、递推最小二乘法 三、MATLAB实现 1.Step1 2.Step2 3.Step3 4.Step4 5.Step5andStep6 6.Step7 7.完整代码 四、结果展示)
- [二、递推最小二乘法](#文章目录 @TOC 前言 一、批处理法与递推法比较 二、递推最小二乘法 三、MATLAB实现 1.Step1 2.Step2 3.Step3 4.Step4 5.Step5andStep6 6.Step7 7.完整代码 四、结果展示)
- [三、MATLAB实现](#文章目录 @TOC 前言 一、批处理法与递推法比较 二、递推最小二乘法 三、MATLAB实现 1.Step1 2.Step2 3.Step3 4.Step4 5.Step5andStep6 6.Step7 7.完整代码 四、结果展示)
- [1.Step1](#文章目录 @TOC 前言 一、批处理法与递推法比较 二、递推最小二乘法 三、MATLAB实现 1.Step1 2.Step2 3.Step3 4.Step4 5.Step5andStep6 6.Step7 7.完整代码 四、结果展示)
- [2.Step2](#文章目录 @TOC 前言 一、批处理法与递推法比较 二、递推最小二乘法 三、MATLAB实现 1.Step1 2.Step2 3.Step3 4.Step4 5.Step5andStep6 6.Step7 7.完整代码 四、结果展示)
- [3.Step3](#文章目录 @TOC 前言 一、批处理法与递推法比较 二、递推最小二乘法 三、MATLAB实现 1.Step1 2.Step2 3.Step3 4.Step4 5.Step5andStep6 6.Step7 7.完整代码 四、结果展示)
- [4.Step4](#文章目录 @TOC 前言 一、批处理法与递推法比较 二、递推最小二乘法 三、MATLAB实现 1.Step1 2.Step2 3.Step3 4.Step4 5.Step5andStep6 6.Step7 7.完整代码 四、结果展示)
- [5.Step5andStep6](#文章目录 @TOC 前言 一、批处理法与递推法比较 二、递推最小二乘法 三、MATLAB实现 1.Step1 2.Step2 3.Step3 4.Step4 5.Step5andStep6 6.Step7 7.完整代码 四、结果展示)
- [6.Step7](#文章目录 @TOC 前言 一、批处理法与递推法比较 二、递推最小二乘法 三、MATLAB实现 1.Step1 2.Step2 3.Step3 4.Step4 5.Step5andStep6 6.Step7 7.完整代码 四、结果展示)
- [7.完整代码](#文章目录 @TOC 前言 一、批处理法与递推法比较 二、递推最小二乘法 三、MATLAB实现 1.Step1 2.Step2 3.Step3 4.Step4 5.Step5andStep6 6.Step7 7.完整代码 四、结果展示)
- [四、结果展示](#文章目录 @TOC 前言 一、批处理法与递推法比较 二、递推最小二乘法 三、MATLAB实现 1.Step1 2.Step2 3.Step3 4.Step4 5.Step5andStep6 6.Step7 7.完整代码 四、结果展示)
前言
既上一章的继续学习,延续上一章的风格。
一、批处理法与递推法比较
批处理最小二乘法(Batch Least Squares, BLS)和递推最小二乘法(Recursive Least Squares, RLS)是最小二乘估计的两种核心实现方式,核心差异在于数据处理方式(一次性处理所有数据 vs 逐次更新数据),进而导致两者在适用场景、性能、资源占用等方面各有优劣。
这是我通过AI整理的两种方法的优缺点,如下:

简单理解:
批处理最小二乘(BLS):离线一次性处理全量数据,实现简单、精度高,但内存占用和计算复杂度随数据量增加而升高,无实时性,适合静态系统离线拟合。
递推最小二乘(RLS):逐次处理新增数据,实时性强、内存占用固定(与数据量无关),能跟踪时变参数,但实现稍复杂、理论上有微小累积误差,适合在线系统、大数据量或时变场景。
核心选择:离线高精度用 BLS,在线 / 时变 / 大数据用 RLS。
二、递推最小二乘法
这里直接给出该方法公式,这个公式可以根据批处理法公式推理过来,推理过程比较复杂,不是我们的学习要求。
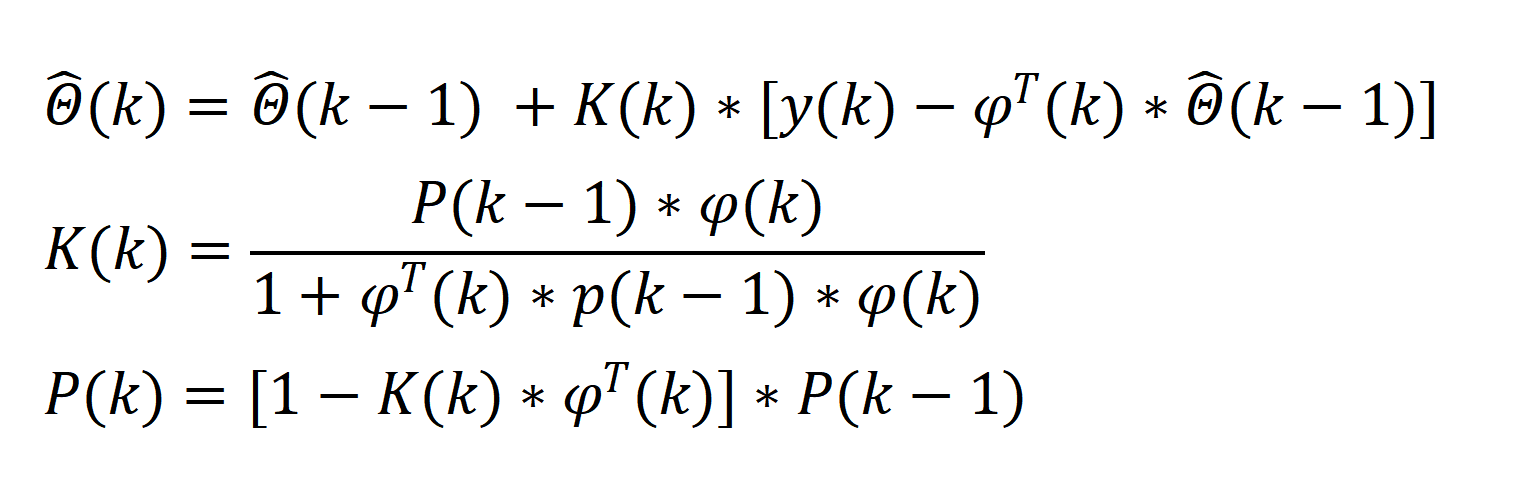
Θ(k)是我们估计的参数,P(k)和K(k)都是中间变量,其中P(0)和Θ(0)定义如下:

接下来还是和上文一样,给定一个具体的系统方程,来验证递推最小二乘法的性能。

算法步骤:
Step1 表示系统的输入参数矩阵和输出参数矩阵
Step2 确定输入输出矩阵大小、输入信号、噪声信号
Step3 完成其他变量初始化
Step4 实现递推最小二乘法公式
Step5 更新数据
Step6 步进加1,返回Step4,继续循环
Step7 打印结果
三、MATLAB实现
1.Step1
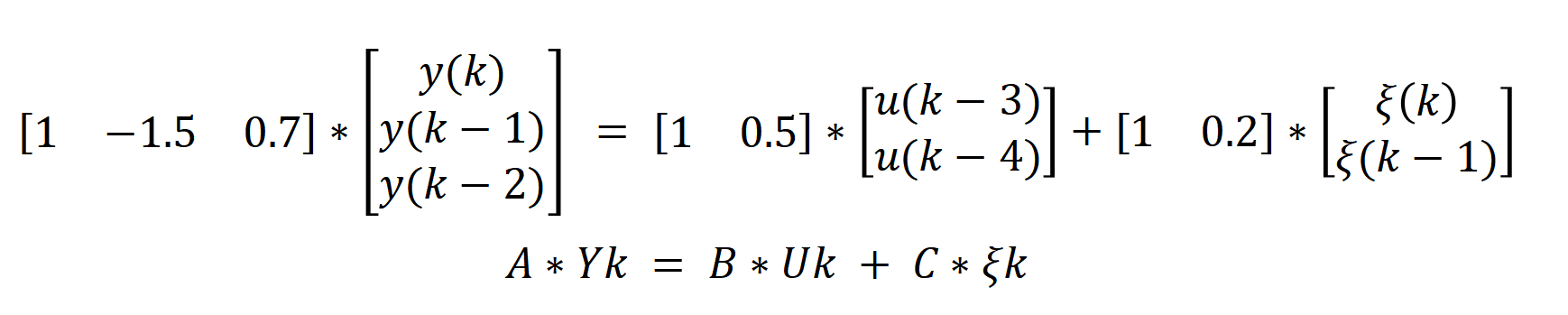
将矩阵整理成以下形式
代码实现如下
c
clear; close all;
A = [1 -1.5 0.7];
B = [1 0.5];
C = [1 0.2];
d = 3;
na = length(A) - 1; %2
nb = length(B) - 1; %1d、na、nb的含义见往文。
2.Step2
c
L = 400;
uk = zeros(d+nb, 1);
yk = zeros(na, 1);
u = randn(1,L);
white_noise = sqrt(0.1)*randn(1,L+1);
white_noise(1) = 0;L就是参数估计次数,uk和yk的表达式如下,元素初始为0

输入信号u设定为正态分布,white_noise 也就是ξ(k)设定为期望为0,方差为0.1的高斯分布。因为方程中有ξ(k-1)项,所以共有L+1项,令white_noise(k) 代表ξ(k-1);
3.Step3
c
theta = [A(2:na+1) B]';
thetak_1 = zeros(na+nb+1,1);
thetak = zeros(na+nb+1,L);
P =10^10*eye(na+nb+1);theta也就是Θ(k),thetak用来记录估计的k时刻Θ参数,thetak_1用来记录估计的k-1时刻Θ参数,保持和theta同类型矩阵,元素初始化为0。P按要求初始化即可

4.Step4
c
for k = 1:L
phik = [-yk; uk(d: d+nb)];
y_now = phik' * theta + white_noise(k+1)+0.2*white_noise(k);
%递推最小二乘法
K_now = P * phik / (1+phik'*P*phik);
thetak(:,k) = thetak_1 + K_now*(y_now - phik'*thetak_1);
P = (eye(na+nb+1) - K_now*phik')*P;为了方便求y(k)可以将方程写成如下形式。phik 就是φ(k)。y_now 就是计算的当前输出值,K_now 是当前中间变量K(k)的值,thetak(:,k)用于计算当前参数估计的Θ(k)值,并且所有的值都合并到一个矩阵中,方便后期打印。

5.Step5andStep6
c
%更新数据
thetak_1 = thetak(:,k);
%输入信号更新begin
for i = d+nb:-1:2
uk(i) = uk(i-1);
end
uk(1) = u(k);
%输入信号更新end
%输出信号更新begin
for i = na:-1:2
yk(i) = yk(i-1);
end
yk(1) = y_now;
%输出信号更新end
end6.Step7
c
plot(1:L,thetak);
xlabel('k');
ylabel('参数估计a,b');
title('递推最小二乘法仿真')
legend('a_1','a_2','b_0','b_1');
axis([0 L -2 1.5]);7.完整代码
c
clear; close all;
A = [1 -1.5 0.7];
B = [1 0.5];
C = [1 0.2];
d = 3;
na = length(A) - 1; %2
nb = length(B) - 1; %1
L = 400;
uk = zeros(d+nb, 1);
yk = zeros(na, 1);
u = randn(1,L);
white_noise = sqrt(0.1)*randn(1,L+1);
white_noise(1) = 0;
theta = [A(2:na+1) B]';
thetak_1 = zeros(na+nb+1,1);
thetak = zeros(na+nb+1,L);
P =10^10*eye(na+nb+1);
for k = 1:L
phik = [-yk; uk(d: d+nb)];
y_now = phik' * theta + white_noise(k+1)+0.2*white_noise(k);
%递推最小二乘法
K_now = P * phik / (1+phik'*P*phik);
thetak(:,k) = thetak_1 + K_now*(y_now - phik'*thetak_1);
P = (eye(na+nb+1) - K_now*phik')*P;
%更新数据
thetak_1 = thetak(:,k);
%输入信号更新begin
for i = d+nb:-1:2
uk(i) = uk(i-1);
end
uk(1) = u(k);
%输入信号更新end
%输出信号更新begin
for i = na:-1:2
yk(i) = yk(i-1);
end
yk(1) = y_now;
%输出信号更新end
end
plot(1:L,thetak);
xlabel('k');
ylabel('参数估计a,b');
title('递推最小二乘法仿真')
legend('a_1','a_2','b_0','b_1');
axis([0 L -2 1.5]);四、结果展示
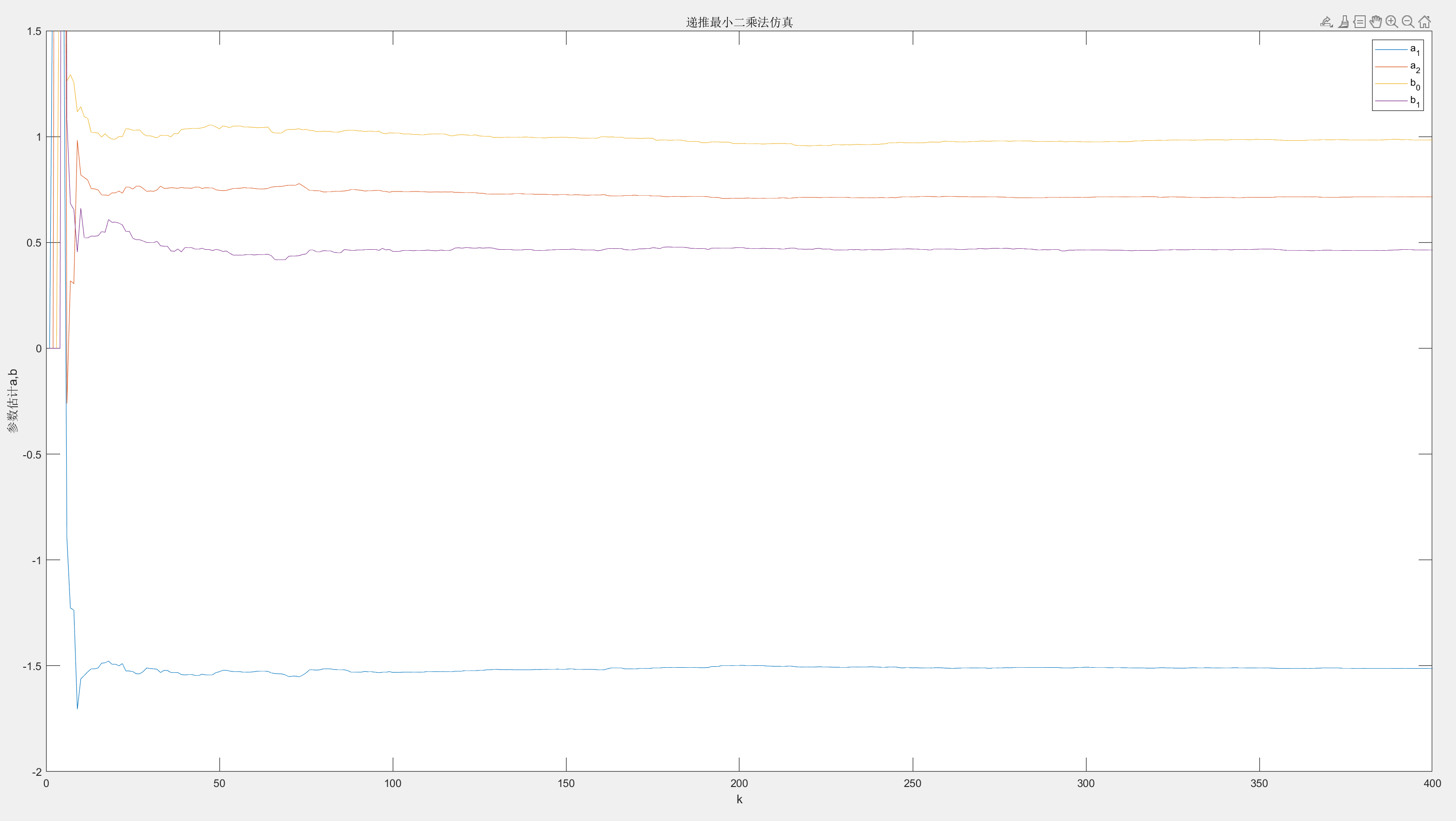
可以看出从25次数据往后估计的值和理论值是非常接近的。去除噪声如下
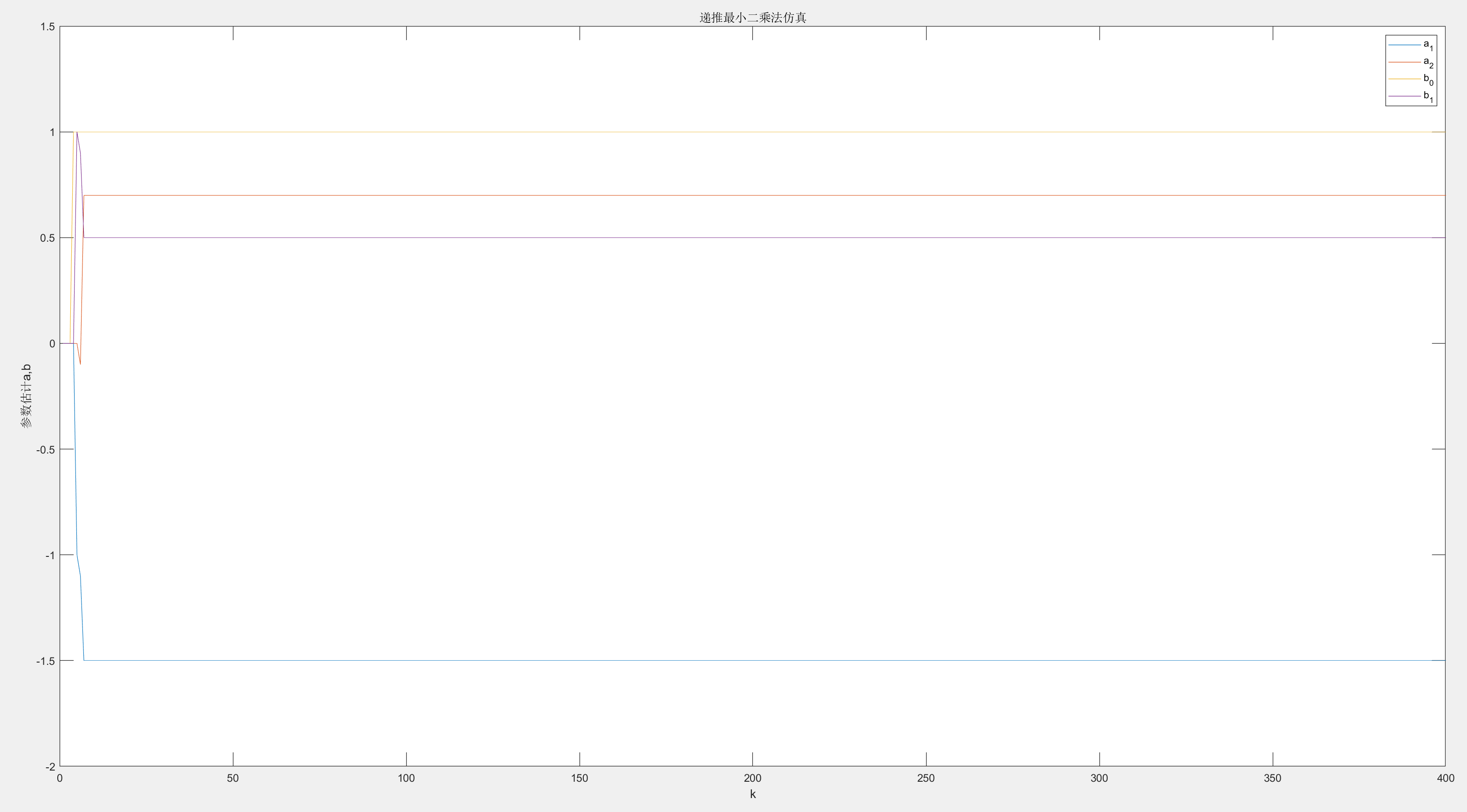
可以看出大约10次左右估计值就完全等于理论值,代表递推法成功。