摘要 : 本文面向 IIoT 开发者 ,深度解析机器人梯控系统 的架构解耦 实践。我们探讨了 EC6200 机器人梯控系统 如何通过非侵入式 状态感知、边缘调度 软件与 API 对接 实现 OT/IT 解耦 ,保障无障碍自主乘梯 。
导语 : 机器人梯控系统 的本质是 OT(电梯控制)与 IT(机器人调度)的安全通信与解耦 。开发者 的目标是建立一个既能高效调度机器人,又不对电梯控制系统产生任何干扰的高可靠性 架构。
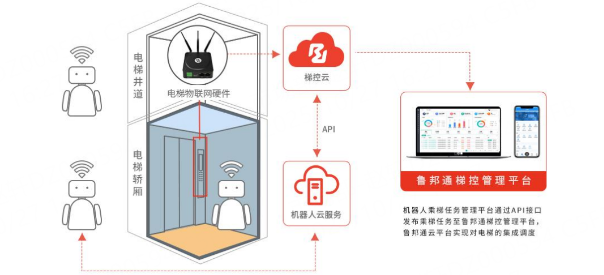
开发者实践:机器人梯控的 API 对接与 MQTT 边缘调度解耦

一、 核心挑战:高可靠通信与 OT/IT 解耦
机器狗应用 实现无障碍自主乘梯 ,必须解决两大架构挑战:
- 通信可靠性 :电梯井道信号屏蔽,通信中断。
- OT 安全红线 :必须采用非侵入式 采集,实现无损安装 。
二、 核心原理:非侵入式采集与状态解耦
机器人梯控系统 (EC6200)通过非侵入式 采集,实现了电梯状态的彻底解耦:
- 非侵入式采集 :采用外部传感器和模块,实现无损安装 ,获取电梯运行状态 和楼层信息 。
- 自主学习 :系统具备电梯运行状态的自主学习和自行校准 能力 。
- OT/IT 解耦 :将复杂的电梯状态数据转化为标准化数据,供机器人调度系统通过 API 调用。
三、 边缘调度:实现多机多梯的协同
机器狗应用 的效率核心在于边缘调度 :
- 调度算法 :内置自主电梯调度核心算法 ,管理所有机器人的乘梯请求,进行多梯调度、多机乘梯 。
- 通信协议 :支持平台 API 对接 和硬件直连 (MQTT/HTTPS),实现与多品牌机器人 (如 AGV、机器狗)的无缝集成 。
- 高可靠性 :通过 全井道信号覆盖 和网络备份,保障调度指令的即时送达。
常见问题解答 (FAQ)
- 问题1 :非侵入式 采集如何保障电梯安全?
- 答 :通过外部传感器感知状态,实现了免破线无损安装 ,确保电梯的核心控制系统不受影响。
- 问题2 :边缘调度 的核心算法是什么?
- 答 :自主电梯调度核心算法 ,用于管理多机排队、派梯和解决人机混用模式 下的冲突。
- 问题3 :高可靠性 如何保障?
- 答 :通过 全井道 Wi-Fi 覆盖 和蜂窝网络备份,保障调度指令的即时送达。
总结 : 机器人梯控系统 的 IIoT 架构 ,以非侵入式 采集为起点,以边缘调度 和 API 对接 实现 OT/IT 解耦 。这为机器狗应用 的规模化落地提供了安全、高效的基础设施。