摘要 : 本文面向 IIoT 开发者 ,深度解析 EC6200 机器人梯控系统 的多机调度 架构。我们探讨了自主电梯调度核心算法 如何实现 MQTT 标准化输出,解决 机器人集群 的排队等待问题,保障可扩展性 。
导语 : 机器人集群 多机调度 的挑战在于如何将 多部电梯资源 和 多台机器人请求 进行实时、高效的匹配。这需要复杂的边缘调度 算法和强大的系统解耦 能力。
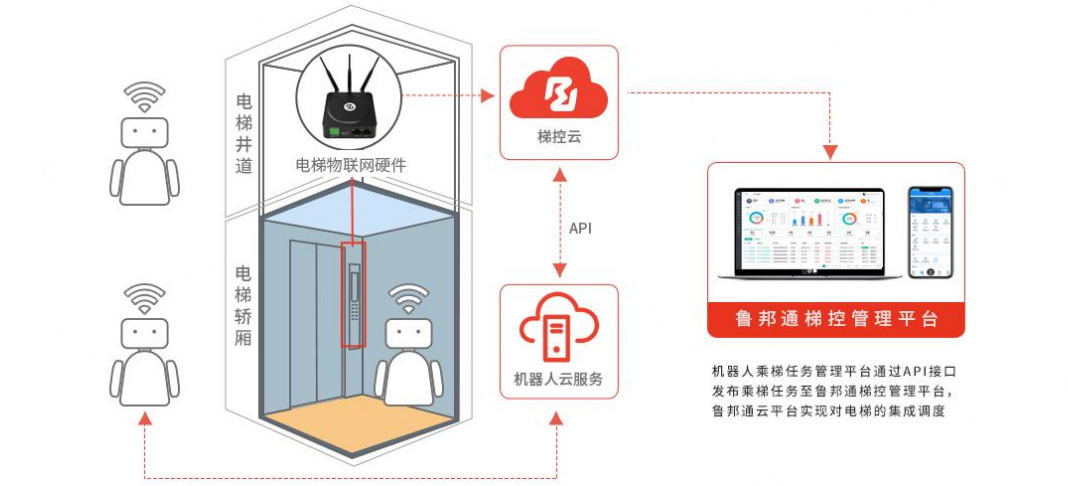
开发者实践:机器人集群的 API 对接与 MQTT 边缘调度解耦

一、 核心挑战:调度算法与资源冲突
多机调度 架构挑战:
- 资源冲突 :机器人集群 竞争电梯,需要多梯协同 算法进行资源分配 。
- 实时性要求 :调度指令必须即时送达,依赖高可靠性通信 。
- 安全隔离 :调度系统必须采用非侵入式 采集 。
二、 核心原理:EC6200 的自主调度核心算法
EC6200 内置的自主电梯调度核心算法 ,是实现 多机/多梯智能分配 的关键:
- 算法解耦 :算法基于请求优先级和电梯实时状态,计算最优解,通过 MQTT 输出标准化指令。
- API 对接 :支持平台 API 对通 和硬件直连 ,方便 开发者 快速集成。
- 高可靠性 :通过 全井道信号覆盖 和网络备份,保障调度指令的即时送达 。
三、 技术实现:边缘调度与 MQTT 解耦
多机调度 的成功依赖于边缘计算网关的解耦能力 :
- OT/IT 解耦 :通过 MQTT 将电梯状态数据(OT)转化为标准化数据(IT),供机器人调用 。
- 可扩展性 :支持 Docker 容器 ,为开发者 预留部署预测性维护 等高级应用的空间。
常见问题解答 (FAQ)
- 问题1 :多机调度 如何实现 API 对接 ?
- 答 :EC6200 作为边缘调度中枢,通过 MQTT/HTTPS 接口与机器人调度系统进行指令和状态交互.
- 问题2 :自主调度核心算法 解决了什么问题?
- 答 :解决了机器人集群 竞争资源导致的效率瓶颈,通过智能分配实现多梯多机协同 .
- 问题3 :高可靠性 如何保障?
- 答 :通过 全井道信号覆盖 和网络备份,保障调度指令的即时送达.
总结 : EC6200 机器人梯控系统 以自主调度核心算法 和多梯多机协同 能力为核心,为机器人集群 的多机调度 提供了高可靠性 的 IIoT 架构 实践。