REF:基于多传感器融合的全自主移动机器人系统设计与实现
1. 系统架构
-
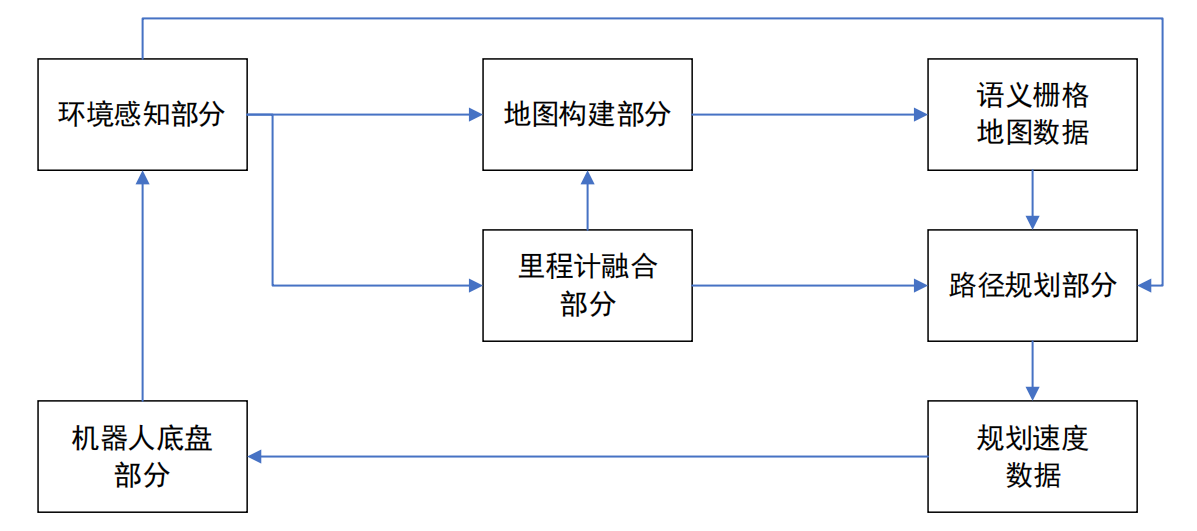
机器人系统架构
-
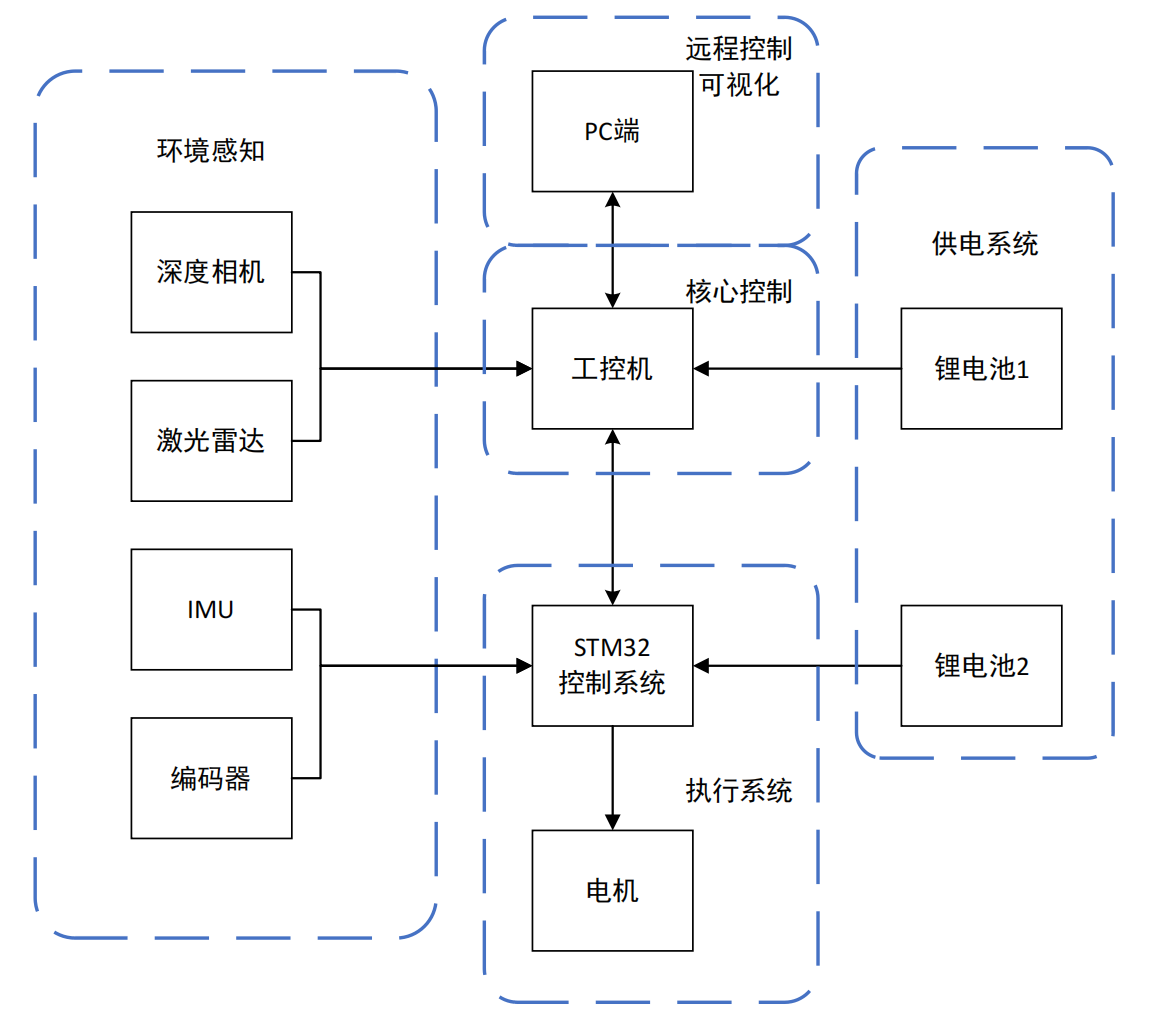
硬件架构
-
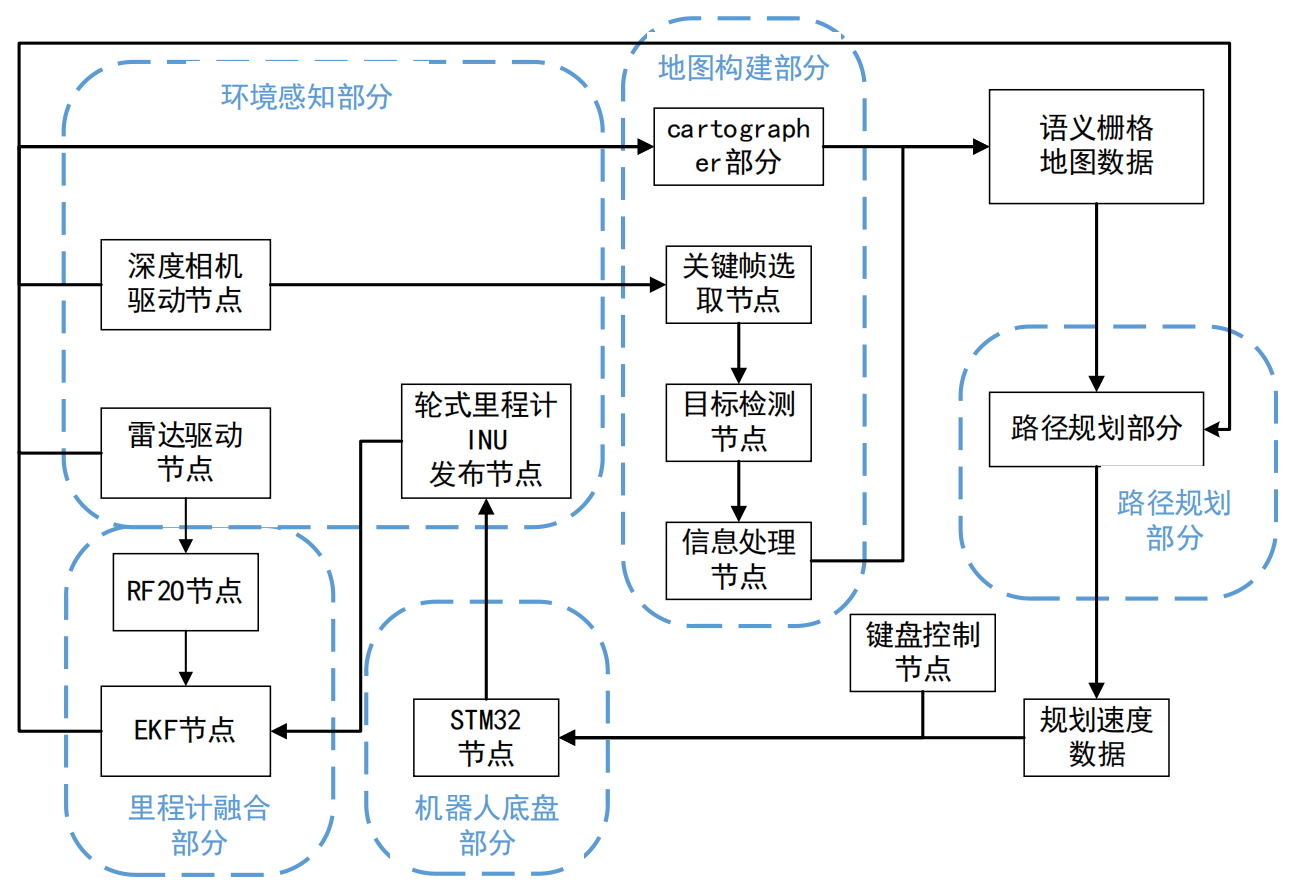
软件架构
-
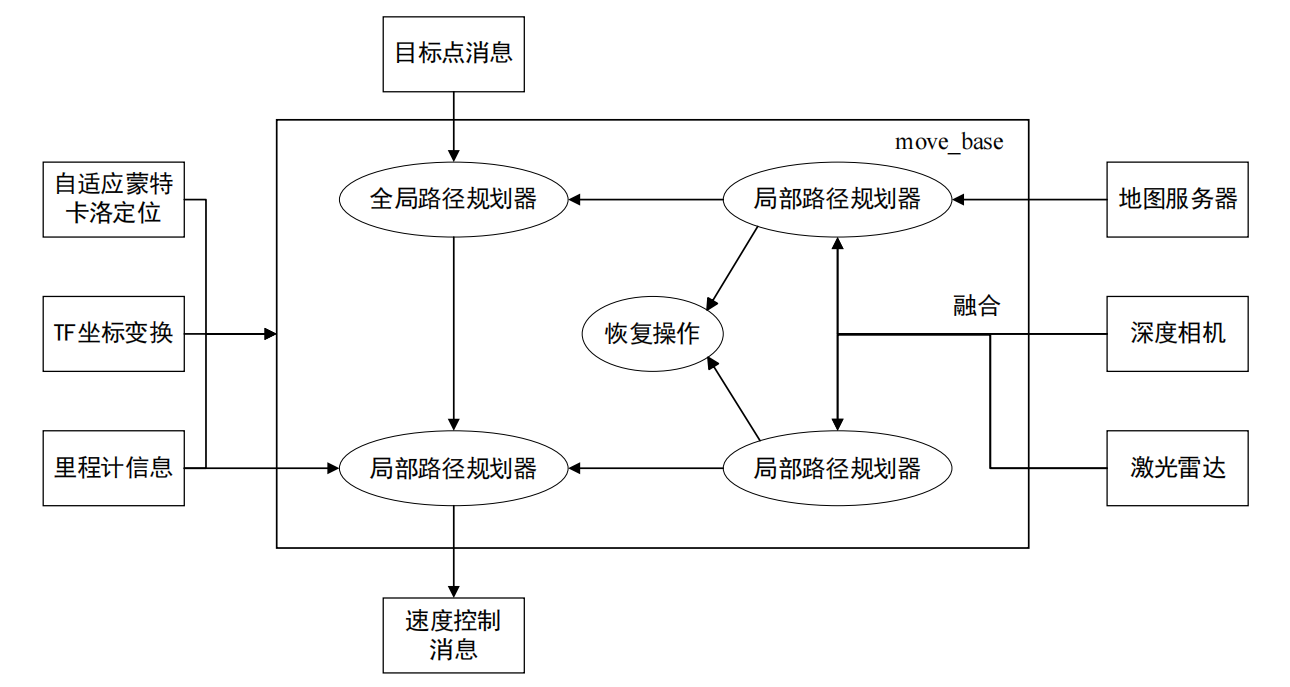
导航架构
-
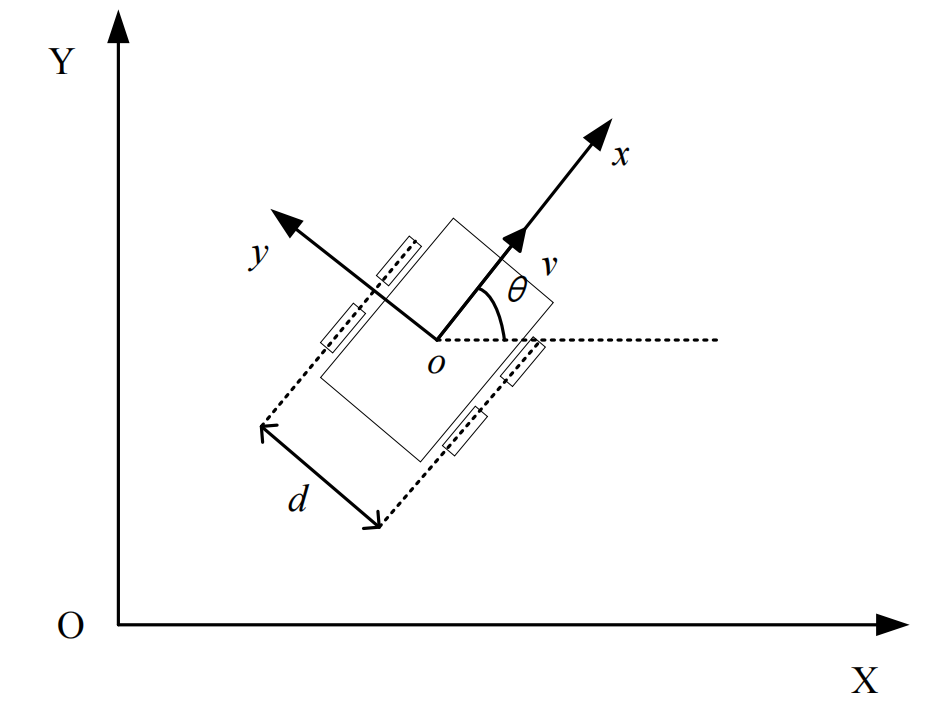
四轮差速运动模型:机器人相对于世界坐标系的位移与旋转关系可以通
过两个矩阵来表示,这两个矩阵分别为位移矩阵T和旋转矩阵R
2. 构建语义栅格地图

-
轮式里程计: 也称为编码器里程计,根据编码器产生的脉冲数计算电动机或轮子的旋转圈数,根据轮子周长计算速度,最后根据运动速度积分计算里程变化。对于低速平稳运动,可以实时提供位姿变化,但轮胎打滑、磨损等会导致估算误差,尤其是在转向或急转弯时,误差可能会迅速累积
-
雷达里程计: RF2O方法,根据传感器的速度为每个激光扫描点设定范围约束方程,通过最小化线性独立几何约束的鲁棒函数来获得雷达的运动估计,激光雷达固定在机器人上,计算得到的速度值可以被视为机器人本体的线速度和角速度
-
融合雷达里程计、轮式里程计和 IMU: 通过扩展卡尔曼滤波在某一点对非线性系统进行泰勒展开,从而将其近似为线性模型,利用迭代过程不断优化,实现对系统状态的最佳估计
-
构建统预测模型,初始化传感器状态矩阵与误差协方差矩阵
-
根据协方差预测和测量模型的不确定性,计算卡尔曼增益
-
将预测的状态和里程计测量进行融合,得到更新后的最佳估计和协方差矩阵
-
重复预测和更新,持续优化状态估计,最后得出融合后的里程计
-
-
Cartographer地图构建算法 :通常由前端与后端两部分:前端负责初步建立图结构,将机器人在各个时刻的位姿信息作为图中的顶点,将这些位姿之间的相对约束关系构建为图的边,形成一个初始的位姿图;后端则负责图的优化,通过调整顶点的位置,使得整个图中的边约束得到最大程度的满足,从而减少位姿估计的误差,提升地图的全局一致性
-
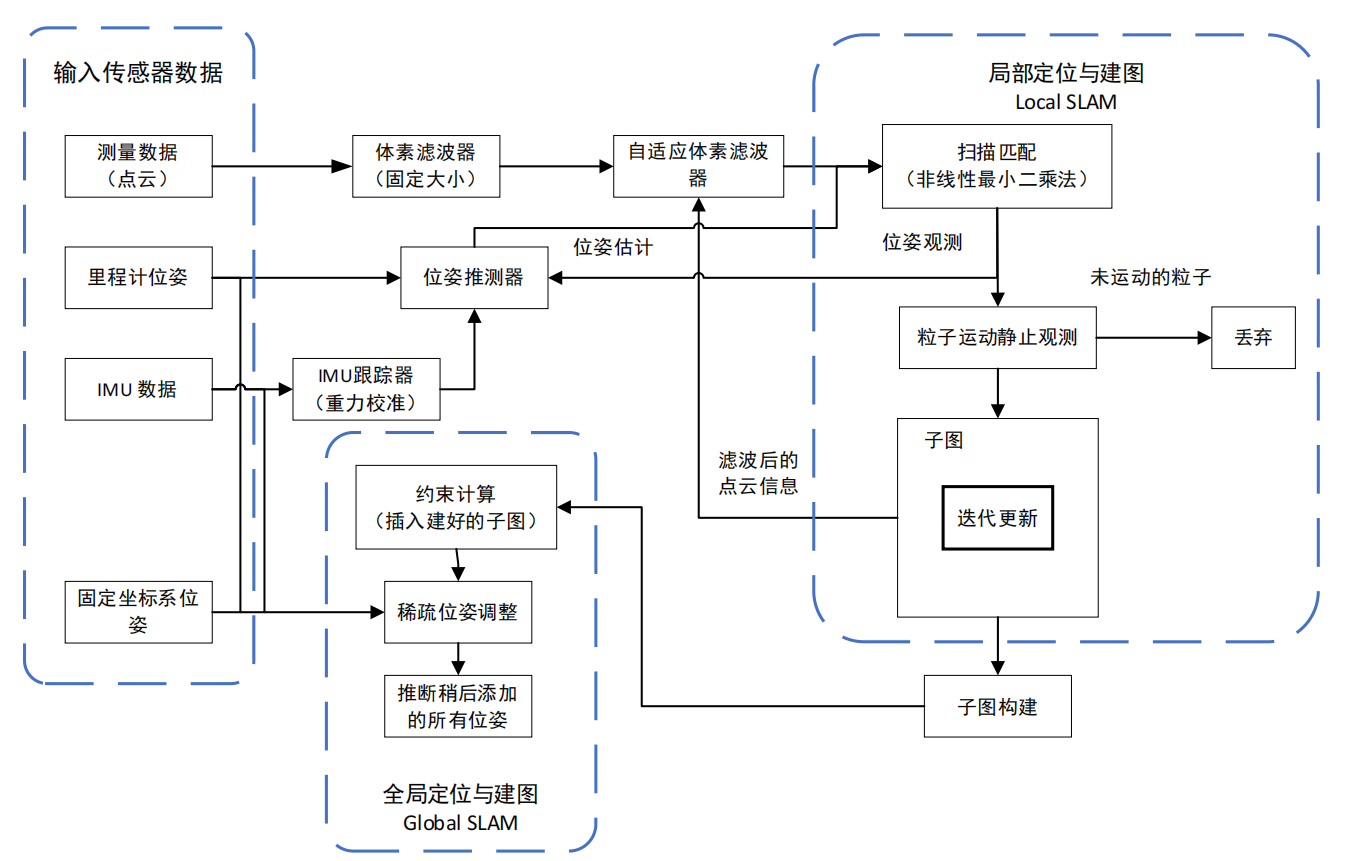
机器人位姿估计:激光雷达点云数据、里程计位姿、IMU 数据和固定坐标系位姿,这些数据经过体素滤波(固定大小)和自适应体素滤波器进行降噪和优化,IMU 用于重力校准,并与里程计数据一起进入位姿推测模块,估算机器人位姿
-
局部 SLAM :利用 Ceres 进行扫描匹配(Scan Matching),结合估算的位姿进行校正得到更准确的位姿观测,经过运动滤波器判断,如果是静止的点云数据,则会被丢弃,否则将用于更新子图
-
全局 SLAM :通过回环检测减少误差,当一个子图构建完成后,系统计算约束关系(包括节点之间的约束和回环约束),进行稀疏位姿调整,并优化所有历史位姿,生成更精准的 SLAM 地图
-
-
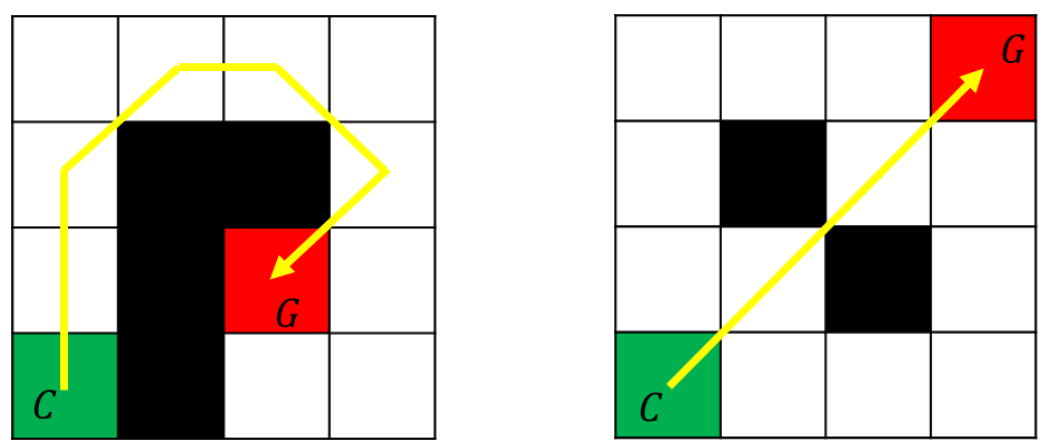
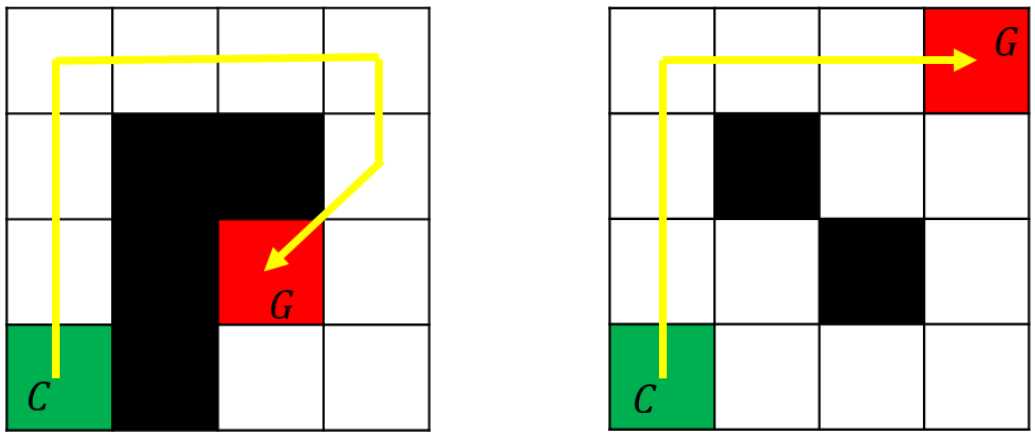
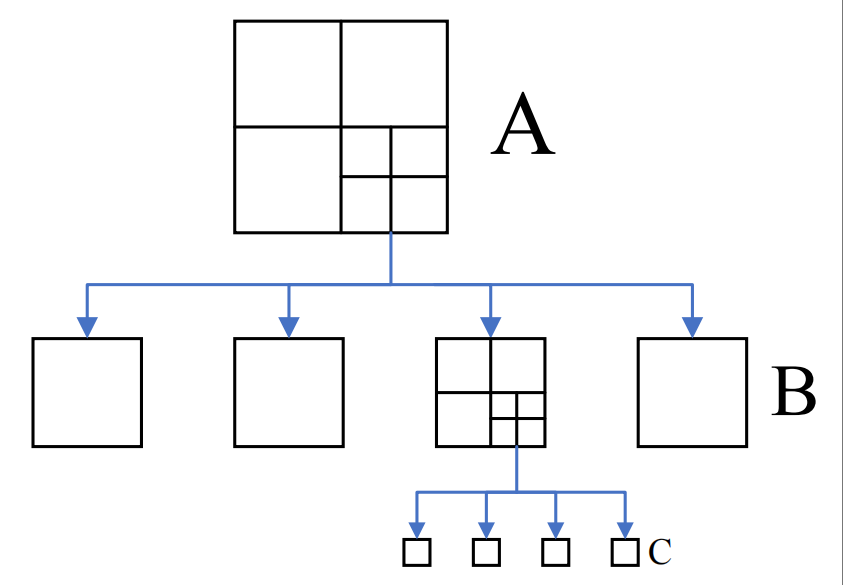
Cartographer运用分支定界方法: 顶层A表示整个环境地图,B 为低分辨率子图,C 为高分辨率子图,以 A 层的右下子图为例说明:
-
激光数据帧先于 B 层低分辨率子图进行匹配,计算出 B 层的激光匹配得分
-
B 层匹配得分较高的子图,在 C 层的高分辨率子图中进一步进行匹配计算,得到 C 层的匹配得分
-
将 C 层子图中的最高匹配得分与 B 层的匹配得分进行比较,当 C 层子图的最高匹配得分仍然小于 B 层的匹配得分上界时,则剪枝该子图对应的 C 层搜索过程,不再进行更精细的匹配计算
-
-
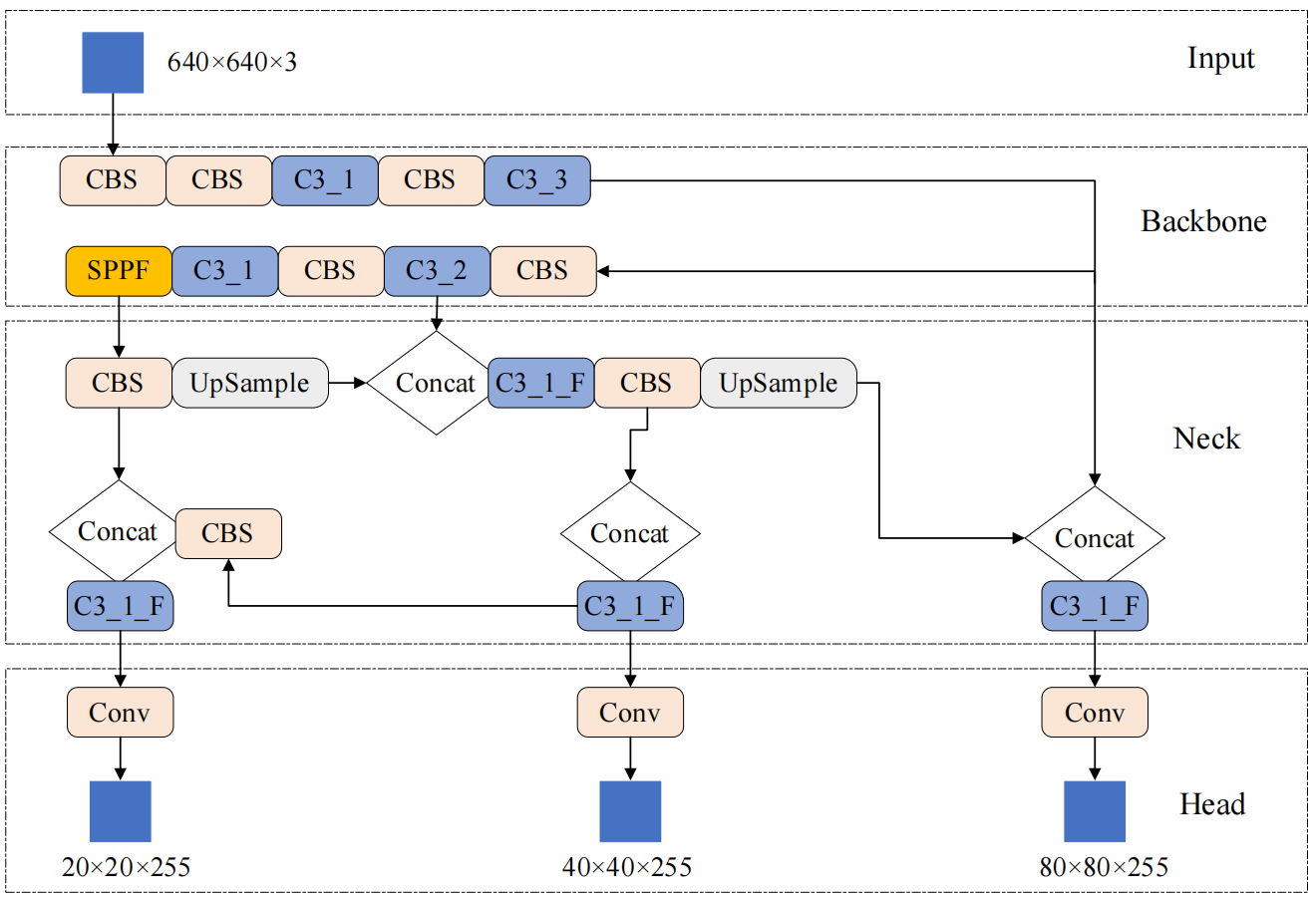
基于 YOLOv5 获取语义 :先统一输入图像的尺寸,对图像进行大小为 S×S 的单元区域划分,被检测物体的中心点位于网格时,通过网络的特征提取,即可确定物体的位置与其类别信息,特征由单元格的特征提取模块进行预测。
-
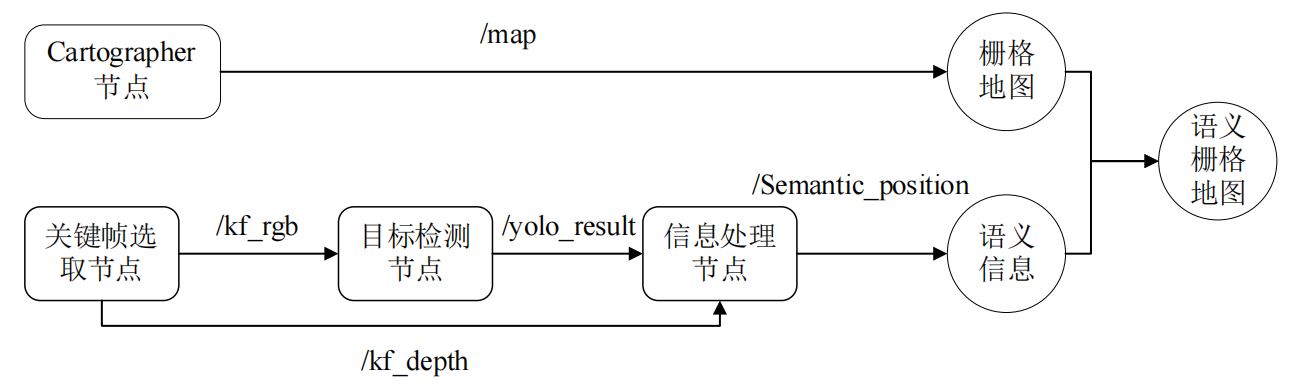
选取关键帧 :根据里程计提供的运动数据,计算出算出机器人两帧旋转角度和相对平移量,如果大于特定阈值,表明当前帧与上一帧关键帧之间的空间位姿差异显著,机器人相对于其上一个观察点已发生较明显的位移与视角变化。
-
计算语义物体的位置 :使用 YOLOv5 算法对 RGB 图像检测,获取到物体的类别和目标物体,在 RGB 图像中的像素坐标,通过计算位置节点对相同时间戳的深度图像处理,在深度图像中使用相应坐标获得的物体深度距离,可得到物体在相机坐标系上的位置,再通过坐标转换,可以获得到物体在地图坐标系上的位置坐标
-
计算图像中心位置:在 RGB 图像的像素坐标获取目标物体检测框,取目标物体检测框的中心位置作为一般物体的几何中心,针对特定物体采用规定几何中心坐标
-
计算深度相机距离:采用均值滤波避免噪声,在对应的深度图中收集坐标对应周围 9 个点的深度值的均值
-
计算深度值:当前坐标位于深度图像坐标系中,需要将其转换到相机坐标系下,先标定深度相机,得到相机焦距,计算出深度值
-
计算地图坐标系距离:得到物体在相机坐标系下的坐标后,借助机器人坐标系作为中间桥梁,转换坐标系到地图坐标系
-
投影到二维格栅地图:将地图坐标系下的物体三维坐标投影到二维栅格平面,并将其转换为离散的栅格坐标,忽略三维坐标中的高度信息,仅保留 x 和 坐标,就得到目标物体在栅格地图坐标系下的坐标
-
-
语义标注栅格地图: 采用基于栅格地图的语义标注方法,将语义信息与特定的栅格单元关联(栅格地图中的某些栅格单元被选作关键点,并与对应物体的语义信息相绑定),以构建语义栅格地图
3. 路径规划
-
搜索方向优化Astar:默认探索的子节点过多导致计算大量的无关节点,路径规划效率降低
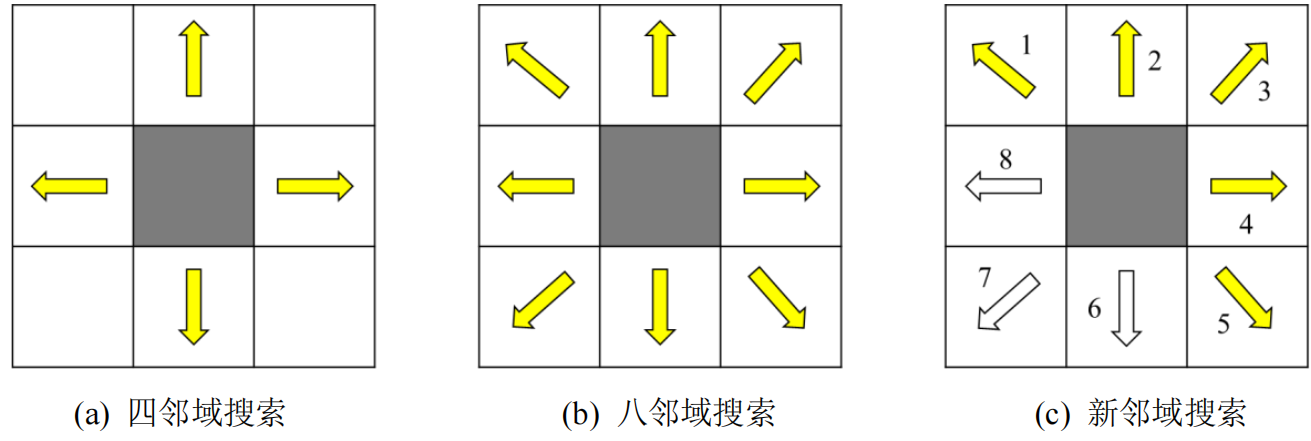
-
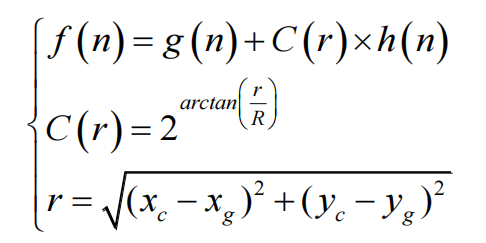
动态调整代价函数:基于跟目标点距离变化,以当前点和终点的距离为基准,在起点一侧的节点,权重值较大,加快搜索节点效率;在靠近终点的节点,会逐渐降低的权重,增加探索节点,以能够找到最优路线。
-
过滤障碍物附近对角线路径:当节点四周有障碍物时,舍弃与障碍物相邻的子节点