REF:基于激光和视觉SLAM 的自主导航机器人系统设计
1. 系统架构
-
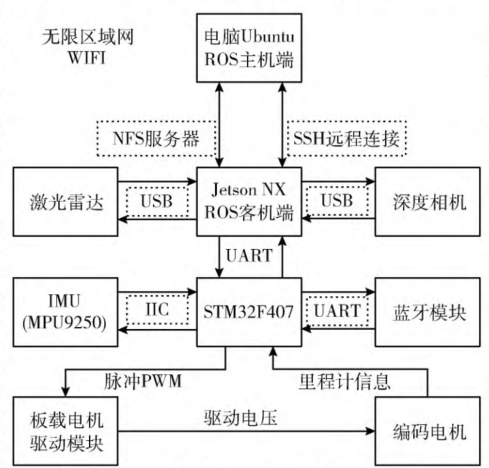
机器人硬件框架
-
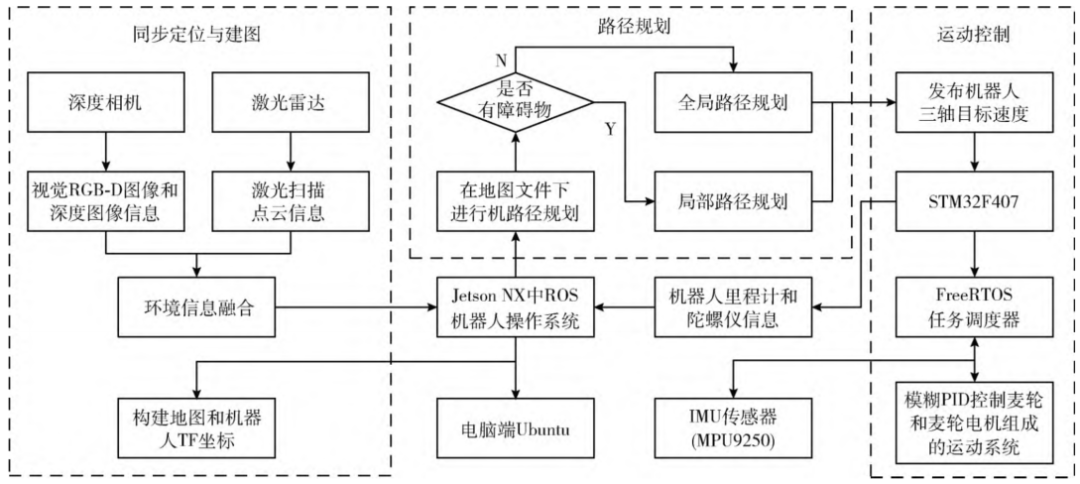
机器人系统软硬件框架
2. SLAM建图
-
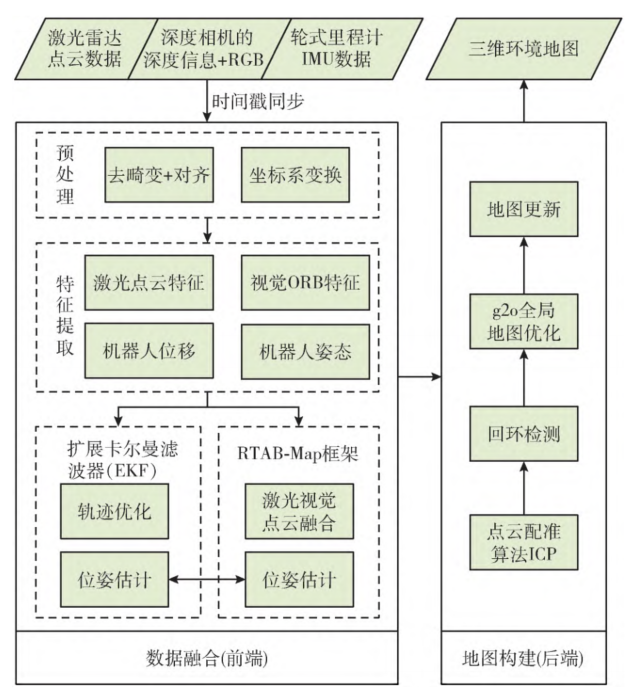
RTAB-MAP位姿估计:(real-time appearance-based mapping),将深度相机和激光雷达的特征描述符放入相同的视觉词袋进行联合,采用优化框架Bundle Adjustment将特征点的匹配关系和位姿变换进行联合优化,通过高斯牛顿法最小化重投影误差E,得到最优位姿估计。
-
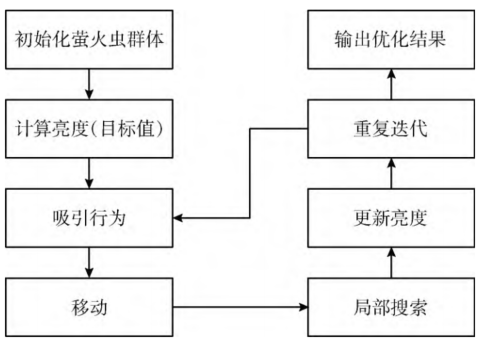
萤火虫算法(FA):通过模拟萤火虫之间的相互吸引行为来寻找最优解,吸引度函数用于描述萤火虫之间的吸引强度
-
基于FA优化GMapping算法:萤火虫算法引导重采样过程,通过选择有效粒子数 Neff为优化目标函数,对建图精度进行优化
-
生成重采样阈值:随机生成一组初始萤火虫
-
计算退化度:对每个重采样阈值,计算目标粒子退化度
-
计算吸引度:根据目标和当前值的间距,计算吸引度函数,亮度高的萤火虫吸引周围较暗的萤火虫向其移动
-
更新重采样阈值:根据吸引行为,更新重采样阈值使粒子退化度向目标值的方向移动
-
局部优化:更新粒子退化度时加入随机数,对部分重采样阈值进行局部搜索
-
更新退化度:对新的重采样阈值重新计算粒子退化度,即更新亮度
-
迭代:重复执行以上步骤,直至建图精度达到要求。
-
-
SLAM三维建图:
3. 路径规划
-
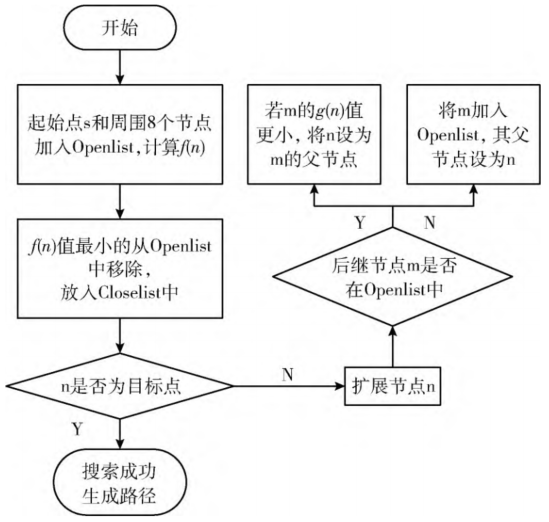
传统 A* 算法:启发式搜索算法
-
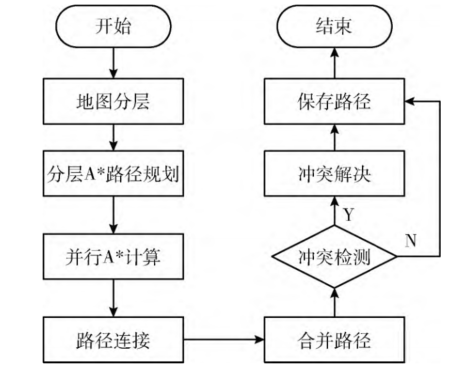
分层并行 A* (HPA*)算法:在 A* 算法基础上引入多层次地图和并行计算,在高层次上快速规划,逐渐细化到低层次,减少计算复杂度,通过并行计算拓展多个节点,提高计算效率
-
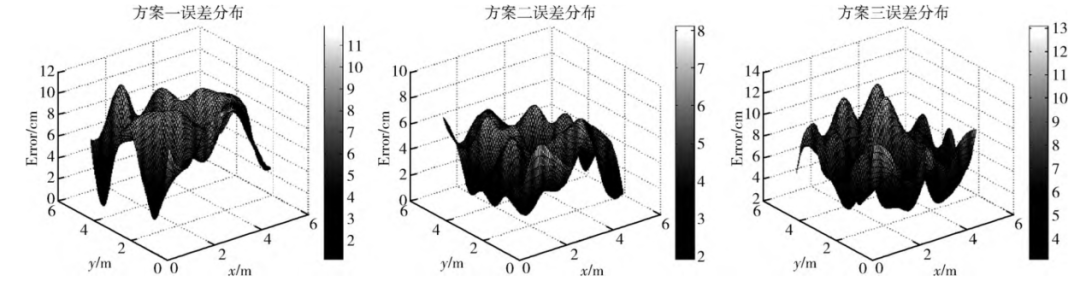
导航方案对比:
-
方案一:FA + GMapping + AMCL + HPA* + DWA
-
方案二:FA + GMapping + AMCL + HPA* + DWA + EKF + RATB-MAP
-
方案三:GMapping + AMCL + A* + DWA
-