PCIe通信案例(DMA方式)
案例说明
案例功能:ARM端基于PCIe总线(开启PCIe DMA)对FPGA BRAM进行读写测试。应用程序通过ioctl函数发送命令开启PCIe DMA传输数据后,等待驱动上报input事件;当应用层接收到input事件,说明DMA传输数据完成。
ARM端案例位于产品资料"4-软件资料\Demo\platform-demos\dma_memcpy_demo\"目录下,FPGA端案例位于产品资料"4-软件资料\Demo\FPGA-demos\bram_pcie\"目录下,具体说明如下:
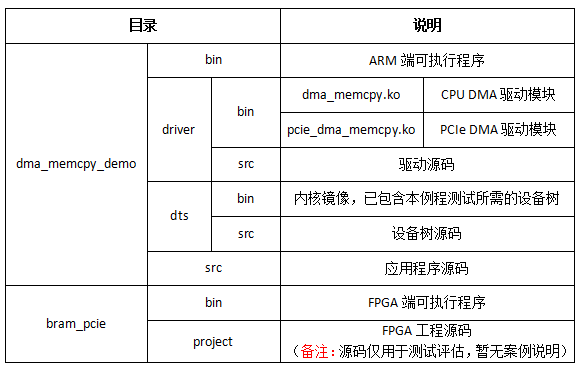
表 1
备注:dma_memcpy_demo案例同时支持使用CPU DMA对DDR进行读写测试,详情请查看"基于CPU DMA的DDR读写测试"小节。
程序流程如下图所示。
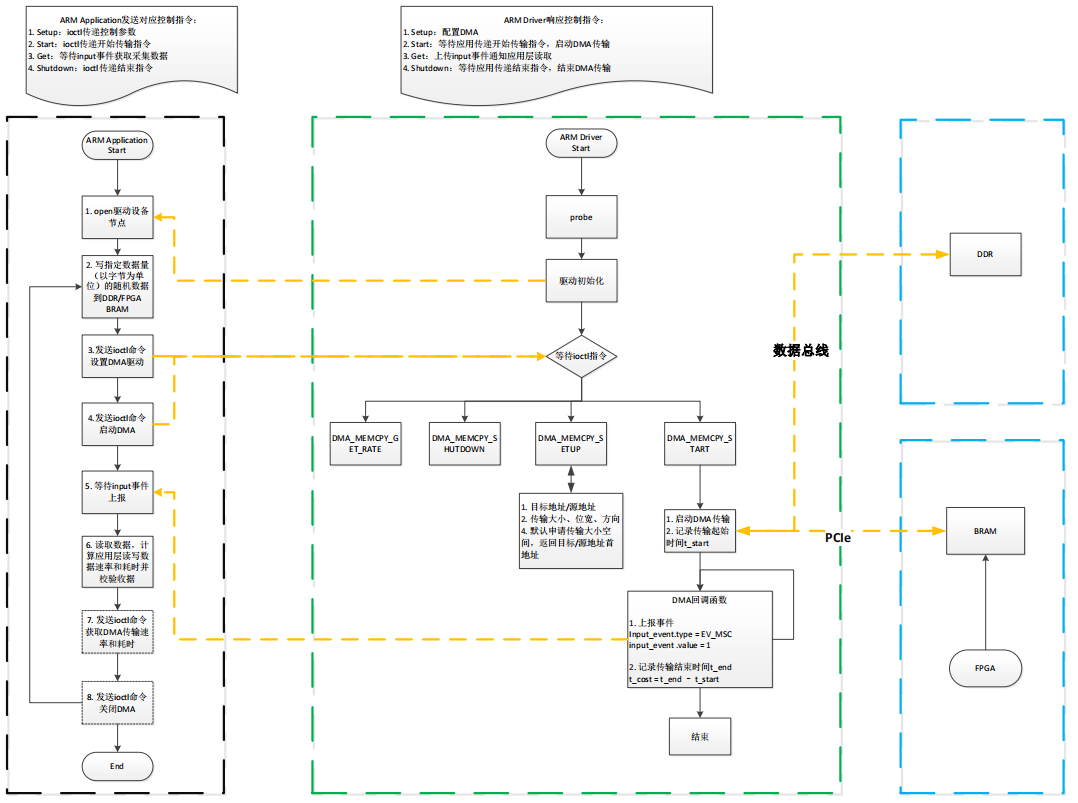
图 1
程序原理说明:
ARM端:
- 采用PCIe DMA方式;
- 将数据写入至dma_memcpy/pcie_dma_memcpy驱动申请的连续内存空间(位于DDR);
- 配置PCIe DMA,如源地址、目标地址、传输的数据大小等;
- 写操作:通过ioctl函数启动PCIe DMA,通过PCIe总线将数据搬运至FPGA BRAM;
- 程序接收驱动上报input事件后,将通过ioctl函数获取PCIe DMA搬运数据耗时,并计算DMA传输速率(即写速率);
- 读操作:通过ioctl函数启动PCIe DMA,通过PCIe总线将FPGA BRAM中的数据搬运至dma_memcpy/pcie_dma_memcpy驱动申请的连续内存空间(位于DDR);
- 程序接收驱动上报input事件后,将数据从内核空间读取至用户空间,然后校验数据,同时通过ioctl函数获取PCIe DMA搬运数据耗时,并计算DMA传输速率(即读速率)。
FPGA端:
- 实现PCIe Endpoint功能;
- 处理PCIe RC端发起的PCIe BAR0空间读写事务;
- 将PCIe BAR0读写数据缓存至FPGA BRAM中。
案例测试
请将创龙科技TLZU-EVM评估板PCIe(CON25)接口连接至TL3588-EVM评估板PCIe RC(CON21)接口,硬件连接如下图所示。
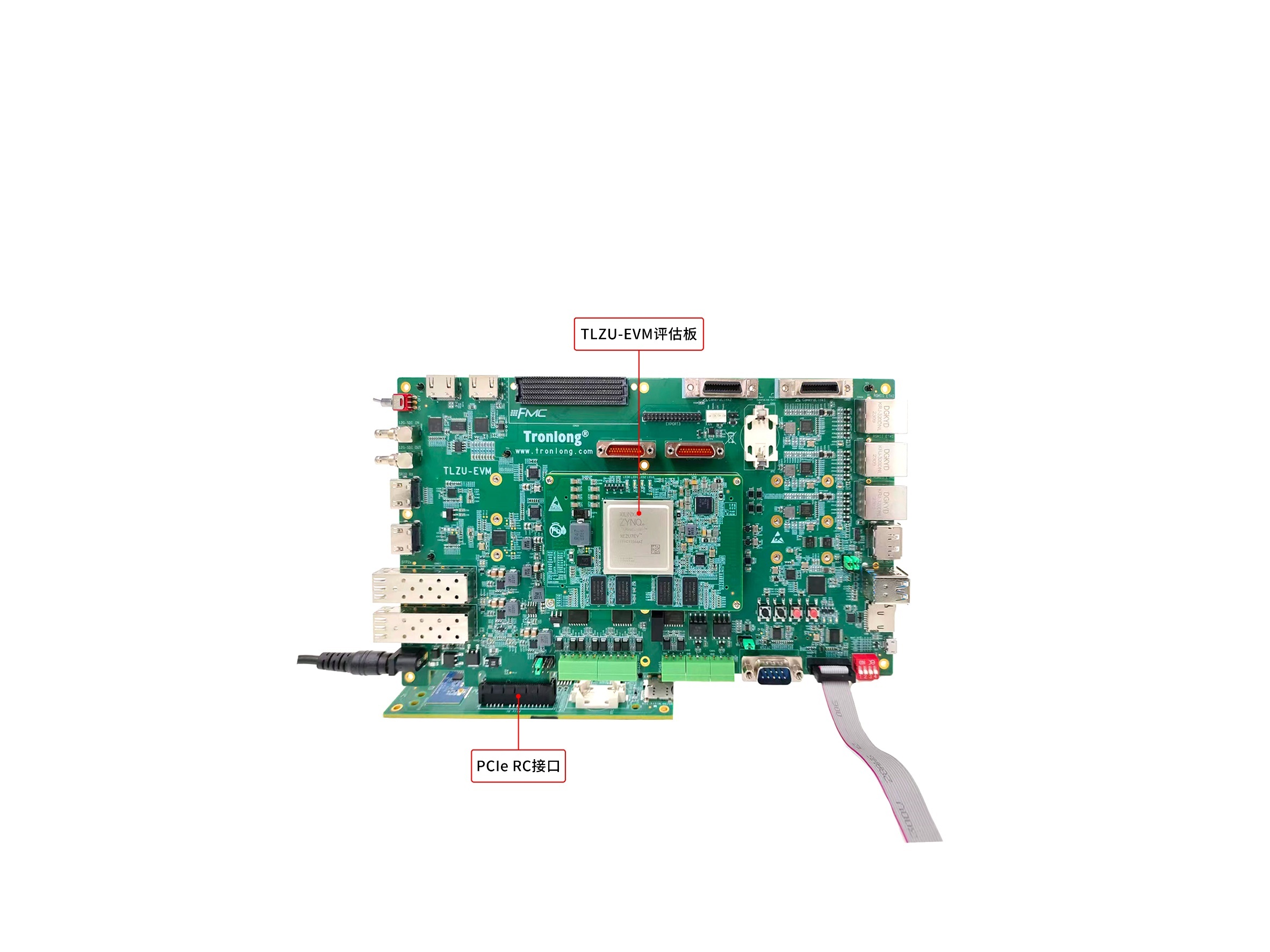
图 2
请将创龙科技TLZU-EVM评估板上电启动,加载运行FPGA案例"bram_pcie\bin\"目录下的可执行程序。
请将案例"dma_memcpy_demo\dts\bin\"目录下的boot-dma-memcpy.img内核镜像文件拷贝至评估板文件系统。执行如下命令,替换内核镜像文件至系统启动卡,评估板重启生效。
备注:如需固化至eMMC,请将设备节点修改为"/dev/mmcblk0p3"。
**Target#**dd if=boot-dma-memcpy.img of=/dev/mmcblk1p3
**Target#**sync
**Target#**reboot

图 3
请将案例"bin\dma_memcpy_demo"可执行程序和"driver\bin\pcie_dma_memcpy.ko"PCIe DMA驱动程序拷贝至文件系统任意目录下。

图 4
执行如下命令,赋予可执行程序dma_memcpy_demo执行权限。
**Target#**chmod a+x dma_memcpy_demo

图 5
进入评估板文件系统,在可执行程序所在目录执行如下命令查看程序参数。
Target#./dma_memcpy_demo -h
参数解析:
-a:设置DDR或PCIe地址;
-s:设置传输数据大小(单位:Byte);
-c:设置循环读写次数;
-d:设置输入设备;
-v:显示版本信息;
-h:显示帮助内容。
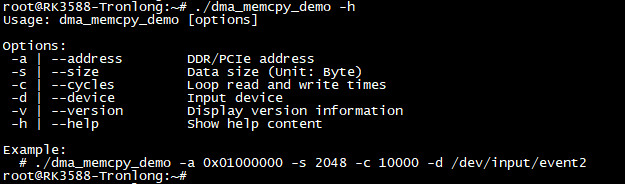
图 6
执行如下命令,查看PCIe BAR空间地址。从下图可见,PCIe BAR空间映射至0xf0200000地址,大小为128KByte,并查看PCIe设备连接状态。
备注:若打印信息与"Speed 5GT/s (ok),Width x4 (ok)"不一致,可能是接触不良导致,需断电后擦拭金手指部分,重新插拔。
**Target#**lspci -s 01:00.0 -vv
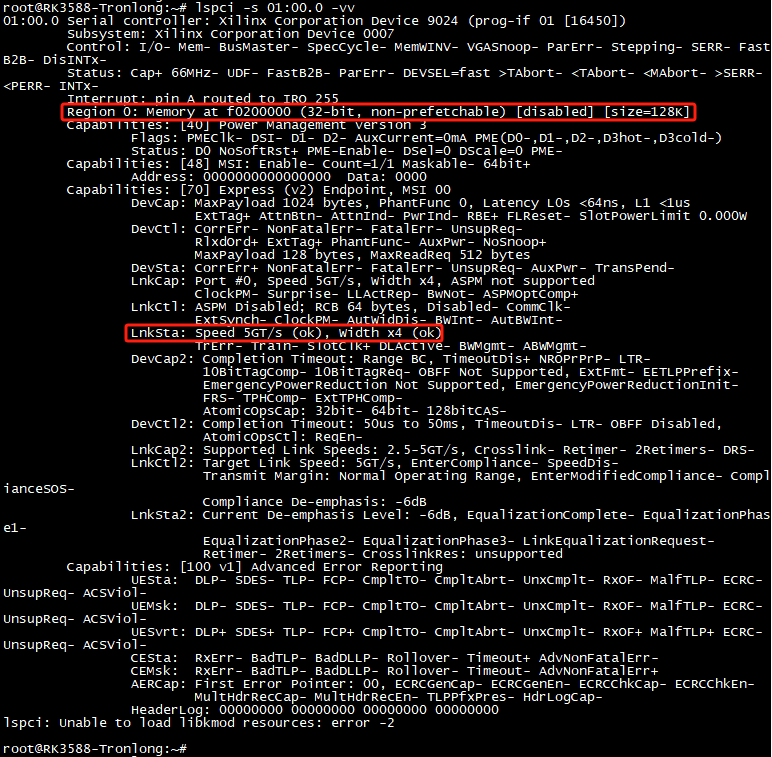
图 7
进入评估板文件系统执行如下命令,加载PCIe DMA驱动程序。
**Target#**insmod -f pcie_dma_memcpy.ko

图 8
执行如下命令,查看事件号。
**Target#**cat /proc/bus/input/devices

图 9
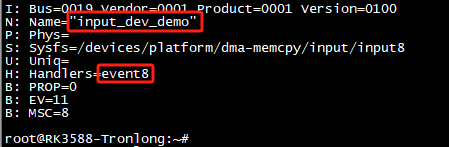
图 10
执行如下命令,调整打印级别,避免调试串口终端打印内核信息影响观察测试结果。
**Target#**echo 1 4 1 7 > /proc/sys/kernel/printk

图 11
执行如下命令,使能PCIe设备。
**Target#**echo 1 > /sys/class/pci_bus/0000\:01/device/0000\:01\:00.0/enable

图 12
执行如下命令,将随机数据先写入FPGA BRAM,再从FPGA BRAM读出。测试完成后,程序将会打印最终测试结果,包含读写平均传输耗时、读写平均传输速率、读写错误统计等信息。
Target#./dma_memcpy_demo -a 0xf0200000 -s 131072 -c 100 -d /dev/input/event8

图 13
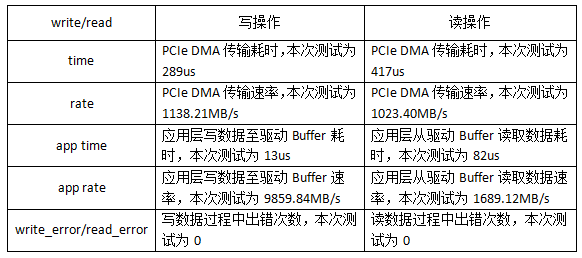
表 2
PCIe Gen2编码开销为8b/10b,PCIe Gen2传输数据的开销如下:
(1)物理层:Start(1Byte)、End(1Byte)
(2)数据链路层:Sequence(2Byte)、LCRC(4Byte)
(3)传输层:Header(12Byte或16Byte)、ECRC(4Byte)
PCIe理论带宽计算如下:
写速率:rate = 5Gb/s x num-lanes x 编码开销 x (MPS/ (MPS + 传输数据的开销))
读速率:rate = 5Gb/s x num-lanes x 编码开销 x (RCB/ (RCB + 传输数据的开销))
MaxPayload为128Byte,RCB为64Byte,为了计算协议消耗更高的理论带宽,取TLP header size =16Byte,因此可计算到PCIe Gen2传输数据的开销为28字节。
若num-lanes为2,则计算得到理论速率为:
写速率:rate = 5Gb/s x 2 x 8/10 x (128 / (128 + 28)) ≈ 840.20MB/s
读速率:rate = 5Gb/s x 2 x 8/10 x (64 / (64 + 28)) ≈ 712.34MB/s
若num-lanes为4,则计算得到理论速率为:
写速率:rate = 5Gb/s x 4 x 8/10 x (128 / (128 + 28)) ≈ 1640.4MB/s
读速率:rate = 5Gb/s x 4 x 8/10 x (64 / (64 + 28)) ≈ 1424.68MB/s
案例编译(ARM端)
请将产品资料"4-软件资料\Demo\platform-demos\dma_memcpy_demo\"案例源码拷贝至Ubuntu工作目录。
(1)应用程序编译
进入案例应用程序源码目录,执行如下命令,配置应用程序交叉编译工具链环境变量,然后进行编译,编译完成将会在当前目录下生成dma_memcpy_demo可执行程序。
Host# export PATH=/home/tronlong/RK3588/rk3588_linux_release_v1.2.1/extra-tools/gcc-linaro-10.2.1-2021.01-x86_64_aarch64-linux-gnu/bin/:$PATH
Host# make
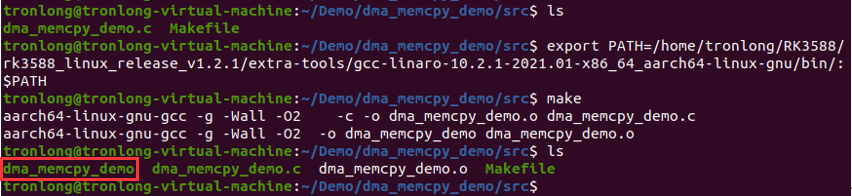
图 14
(2)驱动程序编译
进入案例驱动程序源码目录,执行如下命令,配置驱动程序交叉编译工具链环境变量,然后进行编译,编译完成将会在当前目录下生成dma_memcpy.ko、pcie_dma_memcpy.ko驱动程序。
Host# export PATH=/home/tronlong/RK3588/rk3588_linux_release_v1.2.1/extra-tools/gcc-linaro-10.2.1-2021.01-x86_64_aarch64-linux-gnu/bin/:$PATH
Host# make KDIR=/home/tronlong/RK3588/rk3588_linux_release_v1.2.1/kernel/
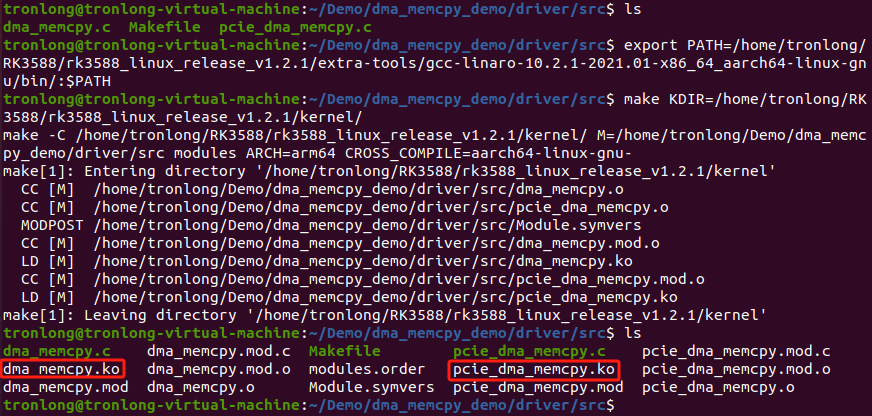
图 15
(3)设备树编译
请将案例"dts\src\tl3588-evm-dma-memcpy.dts"设备树源文件拷贝至LinuxSDK源码目录"kernel/arch/arm64/boot/dts/rockchip/"。

图 16
备注:案例"arm\dts\src\tl3588-evm-dma-memcpy.dts"设备树源文件主要新增dma_memcpy节点,用于加载dma_memcpy或pcie_dma_memcpy驱动,具体如下图所示。内核镜像文件"arm\dts\bin\boot-dma-memcpy.img"已包含tl3588-evm-dma-memcpy.dts编译生成的设备树镜像文件。
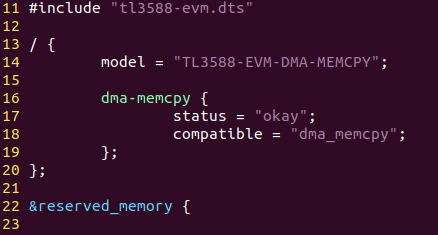
图 17
由于tl3588-evm-dma-memcpy.dts设备树源文件需要引用reserved-mempcy节点,因此需要新增reserved-mempcy节点别名。进入LinuxSDK源码目录,执行如下命令,修改"rk3588-evb7-lp4.dtsi"文件。
Host# vi kernel/arch/arm64/boot/dts/rockchip/rk3588-evb7-lp4.dtsi

图 18
修改内容如下:
reserved_memory: reserved-memory { //新增内容
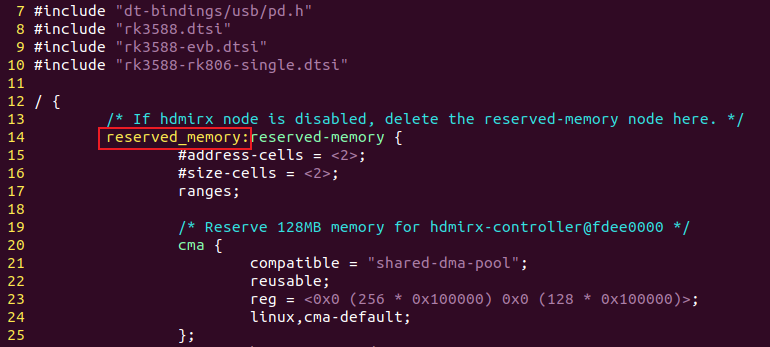
图 19
修改完成后,保存退出,请按照《Debian系统使用手册》文档Debian系统镜像编译、生成章节,替换设备树并重新编译内核,将生成的内核镜像文件拷贝至评估板文件系统进行固化。该内核镜像已包含tl3588-evm-dma-memcpy.dts对应的设备树镜像文件。
关键代码说明(ARM端)
(1)打开设备节点。
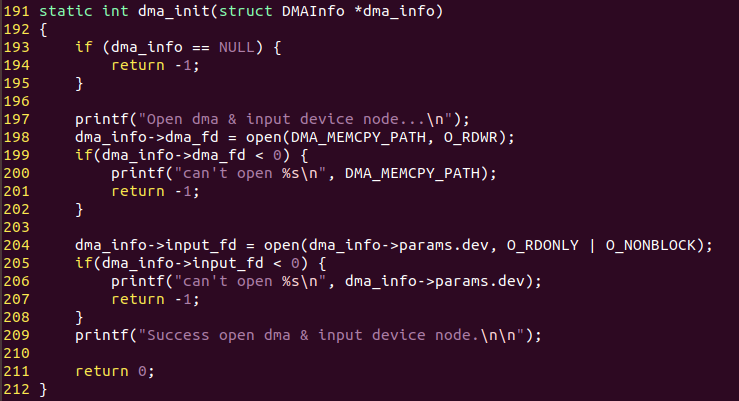
图 20
(2)写数据操作。
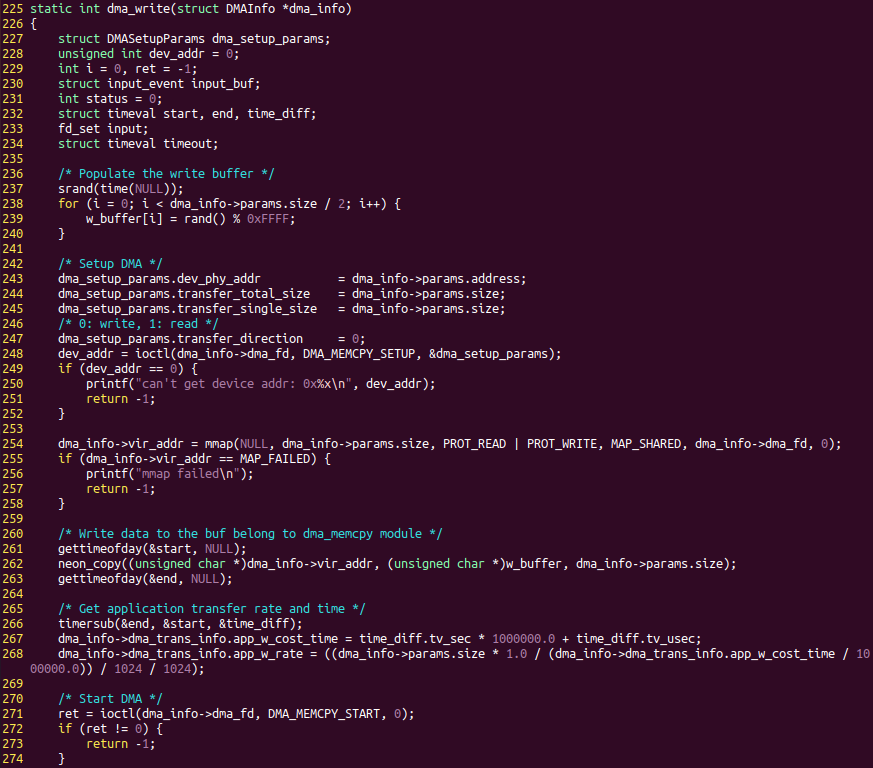
图 21
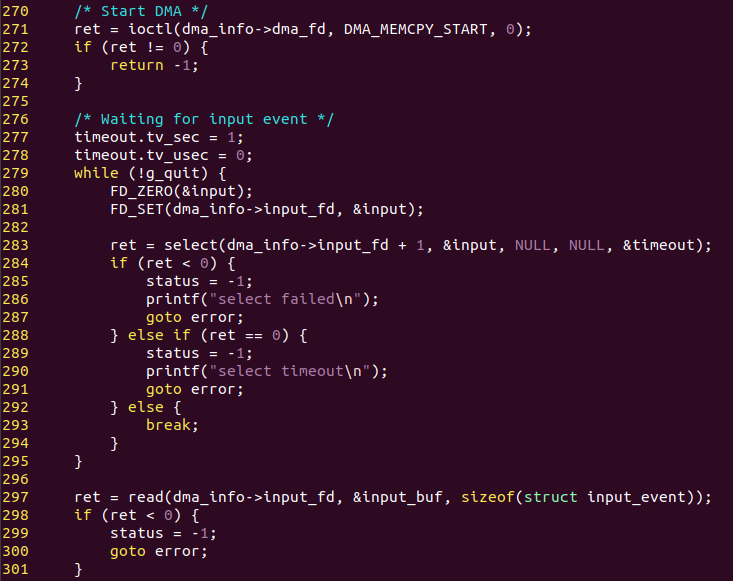
图 22
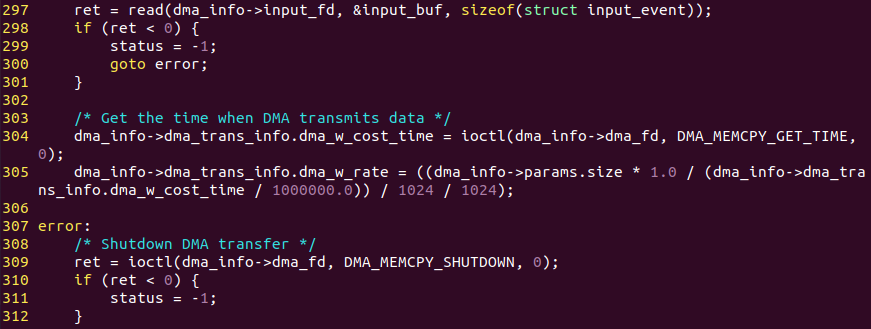
图 23
(3)读取数据操作。
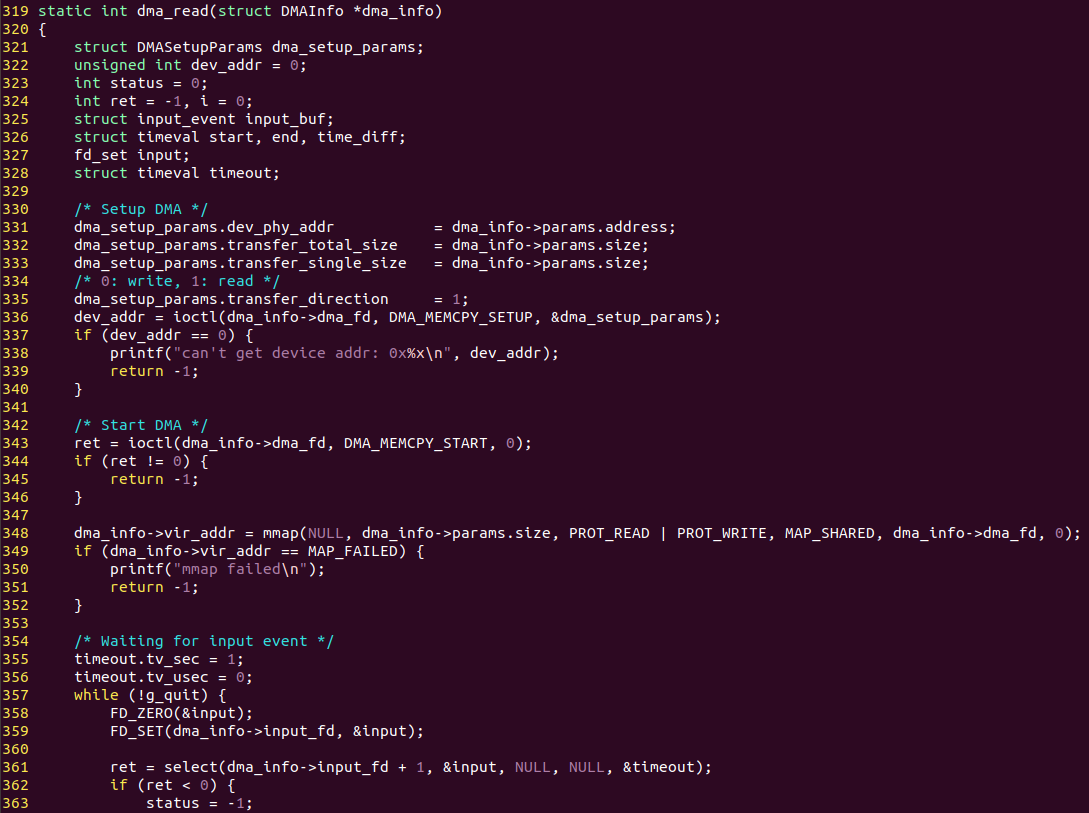
图 24
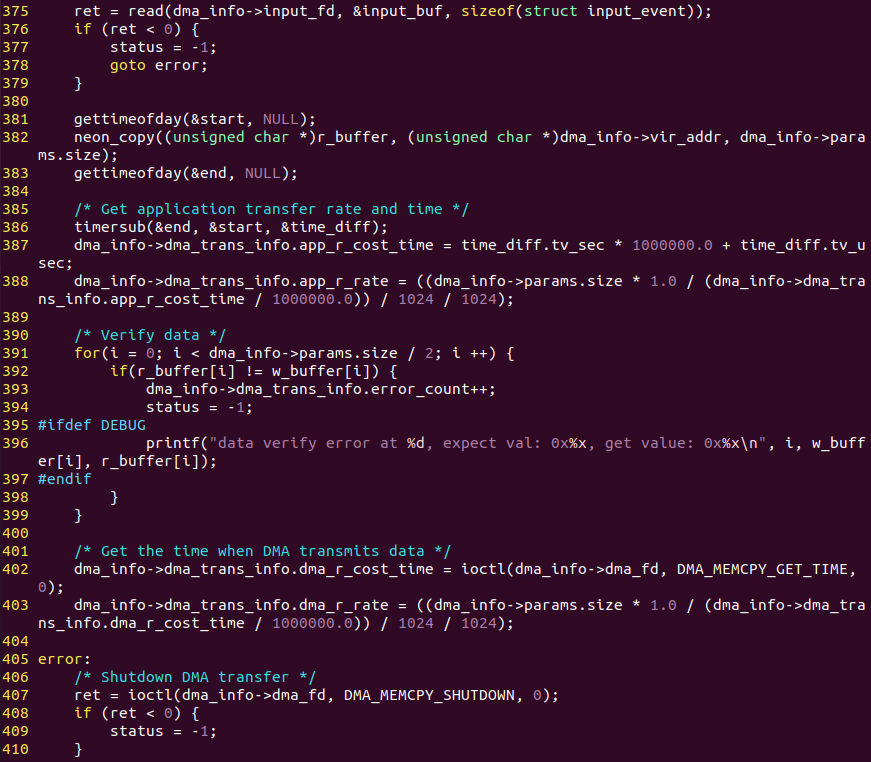
图 25
基于CPU DMA的DDR读写测试
本小节使用dma_memcpy_demo案例,通过CPU DMA对DDR进行读写,并计算传输速率。
备注:本次测试由CPU对DDR进行读写,未使用PCIe总线。
请将案例"bin\dma_memcpy_demo"可执行程序和"driver\bin\dma_memcpy.ko"驱动程序拷贝至文件系统任意目录下。

图 26
执行如下命令,赋予可执行程序dma_memcpy_demo执行权限。
**Target#**chmod a+x dma_memcpy_demo
图 27
进入评估板文件系统执行如下命令,加载CPU DMA驱动程序。
**Target#**insmod -f dma_memcpy.ko

图 28
执行如下命令,查看事件号。
**Target#**cat /proc/bus/input/devices

图 29
图 30
执行如下命令,调整打印级别,避免调试串口终端打印内核信息影响观察测试结果。
**Target#**echo 1 4 1 7 > /proc/sys/kernel/printk
图 31
执行如下命令,进行DDR读写测试。测试完成后,程序将会打印最终测试结果,包含读写平均传输耗时、读写平均传输速率、读写错误统计等信息。其中,写速率为2575.41MB/s,读速率为2583.04MB/s。
Target#./dma_memcpy_demo -a 0x80000000 -s 4194304 -c 100 -d /dev/input/event8

图 32
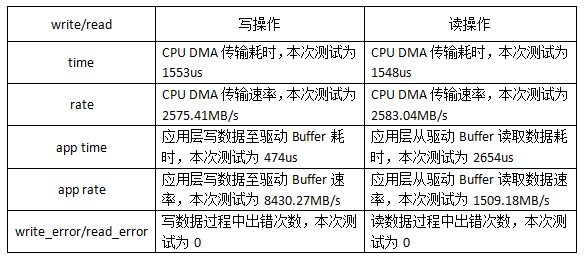
表 3
备注:0x80000000为预留的DDR地址空间,如下图所示,大小为128MByte。
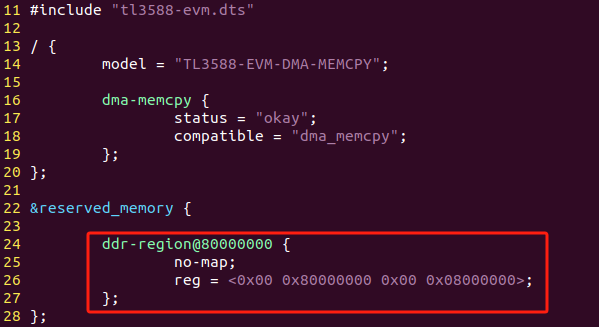
图 33 tl3588-evm-dma-memcpy.dts
PCIe通信案例(非DMA方式)
案例说明
案例功能:ARM端通过PCIe总线(非DMA方式)对FPGA BRAM进行数据读写测试,同时校验数据和计算读写速率。
ARM端案例位于产品资料"4-软件资料\Demo\base-demos\devmem_rw\"目录下,FPGA端案例位于产品资料"4-软件资料\Demo\FPGA-demos\bram_pcie\"目录下,具体说明如下:
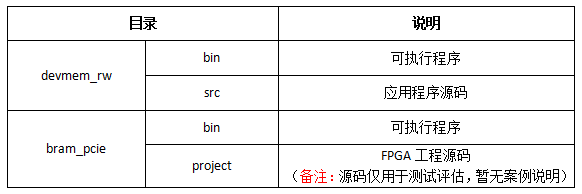
表 4
程序流程说明:
(1)ARM端通过PCIe总线将数据写入FPGA BRAM;
(2)ARM端通过PCIe总线从FPGA BRAM读取数据;
(3)判断写入与读取数据的正确性,并计算读写速率。
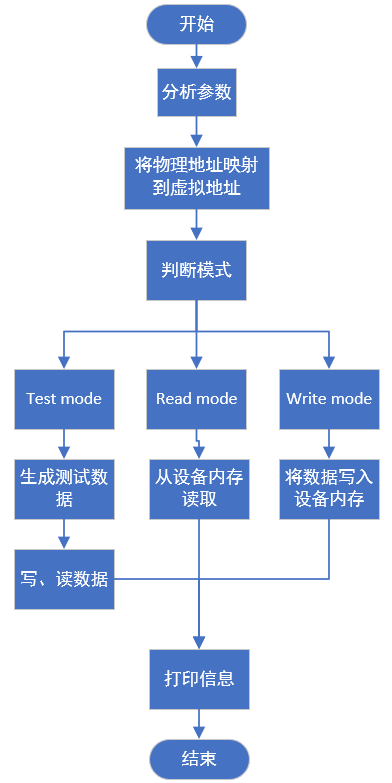
图 34
案例原理说明:
ARM端:
- ARM端使用mmap函数对物理地址进行转换;
- 可根据指定的访问操作类型按字节(Byte)、按半字(Halfword)进行访问。
FPGA端:
- 实现PCIe Endpoint功能;
- 处理PCIe RC端发起的PCIe BAR0空间读写事务;
- 将PCIe BAR0读写数据缓存至FPGA BRAM中。
案例测试
请将创龙科技TLZU-EVM评估板PCIe(CON25)接口连接至TL3588-EVM评估板PCIe RC(CON21)接口,硬件连接如下图所示。
图 35
请将创龙科技TLZU-EVM评估板上电启动,加载运行FPGA案例"bram_pcie\bin\"目录下的可执行程序。
评估板默认内核镜像未支持PCIe RC接口测试,请将产品资料"4-软件资料\Debian\Kernel\image\linux-5.10.160-版本号-Git序列号\"目录下boot-enable-pcie.img文件(支持PCIe RC接口测试)拷贝至评估板文件系统,执行如下命令将其固化至系统启动卡。
备注:若从eMMC启动系统,请将设备节点"mmcblk1p3"修改为"mmcblk0p3"。
**Target#**dd if=boot-enable-pcie.img of=/dev/mmcblk1p3
**Target#**sync
**Target#**reboot

图 36
执行如下命令,查看PCIe BAR空间地址。从下图可见,PCIe BAR空间映射至0xf0200000地址,大小为128KByte,并查看PCIe设备连接状态。
备注:若打印信息与"Speed 5GT/s (ok),Width x4 (ok)"不一致,可能是接触不良导致,需断电后擦拭金手指部分,重新插拔。
**Target#**lspci -s 01:00.0 -vv
图 37
请将ARM端案例"devmem_rw\bin\"目录下的可执行程序devmem_rw拷贝至文件系统任意目录,在devmem_rw可执行程序所在目录执行如下命令,查看程序参数。
Target#./devmem_rw -h
参数解析:
-t:表示测试模式。先写后读,并检验数据的准确性。
-r:读模式,从参数"-a <address>"指定的内存空间地址处,读出参数"-s <size>"指定长度的数据(以字节为单位)。
-w:写模式,从参数"-f <file>"指定的文件获取数据,写入参数"-a <address>"指定的内存空间地址。
-a <address>:指定内存空间地址。
-s <size>:指定数据的长度,以字节为单位。
-o:以字节或半字方式访问内存空间。
-f <file>:指定文件。用于写模式测试。
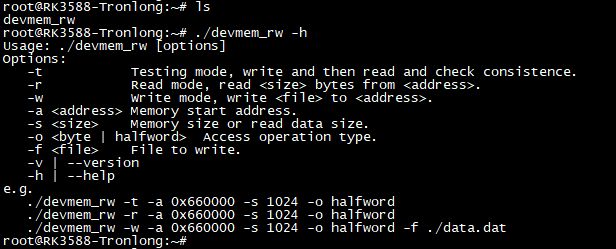
图 38
执行如下命令,使能PCIe设备。
**Target#**echo 1 > /sys/class/pci_bus/0000\:01/device/0000\:01\:00.0/enable

图 39
执行如下命令,将随机数据先写入FPGA BRAM,再从FPGA BRAM读出,校验数据并统计读写速率。
Target#./devmem_rw -t -a 0xf0200000 -s 131072 -o halfword
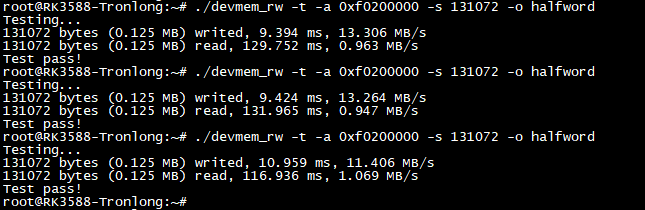
图 40
重复三次测试,调试串口终端打印"Test pass!"信息,表示读写测试通过。
备注:由于本案例采用非DMA方式对FPGA BRAM进行数据读写测试,可能会出现速率波动较大的情况。
案例编译(ARM端)
请将产品资料"4-软件资料\Demo\base-demos\devmem_rw\src\"案例源码拷贝至Ubuntu工作目录。进入案例源码目录,执行如下命令进行编译,编译完成将会在当前目录下生成可执行程序。
Host# source /home/tronlong/RK3588/rk3588_linux_release_v1.2.1/debian/sysroots/environment
Host# make CC=aarch64-linux-gnu-gcc
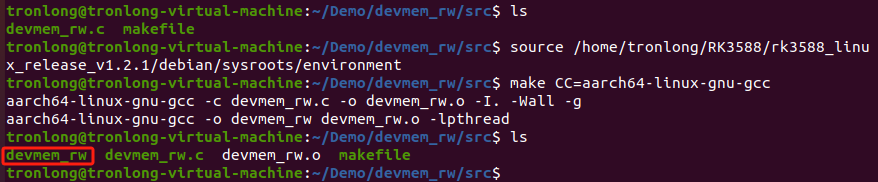
图 41
关键代码(ARM端)
(1)将内存设备地址映射至虚拟地址。
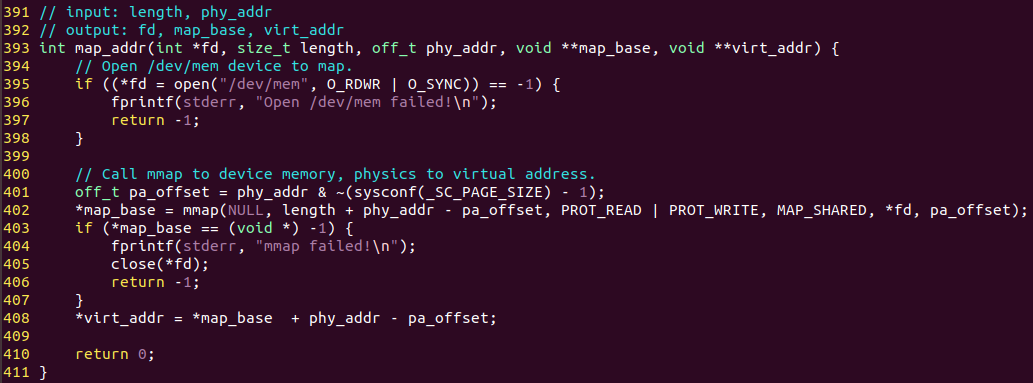
图 42
(2)根据指定的操作方式进行数据读取。
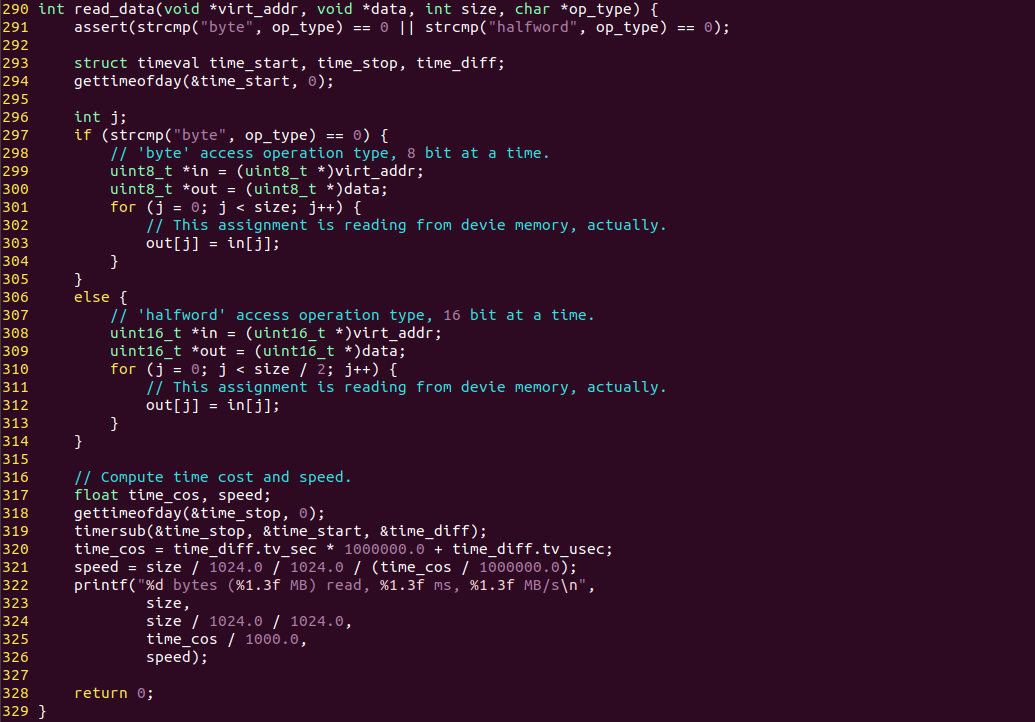
图 43
(3)根据指定的操作方式进行数据写入。
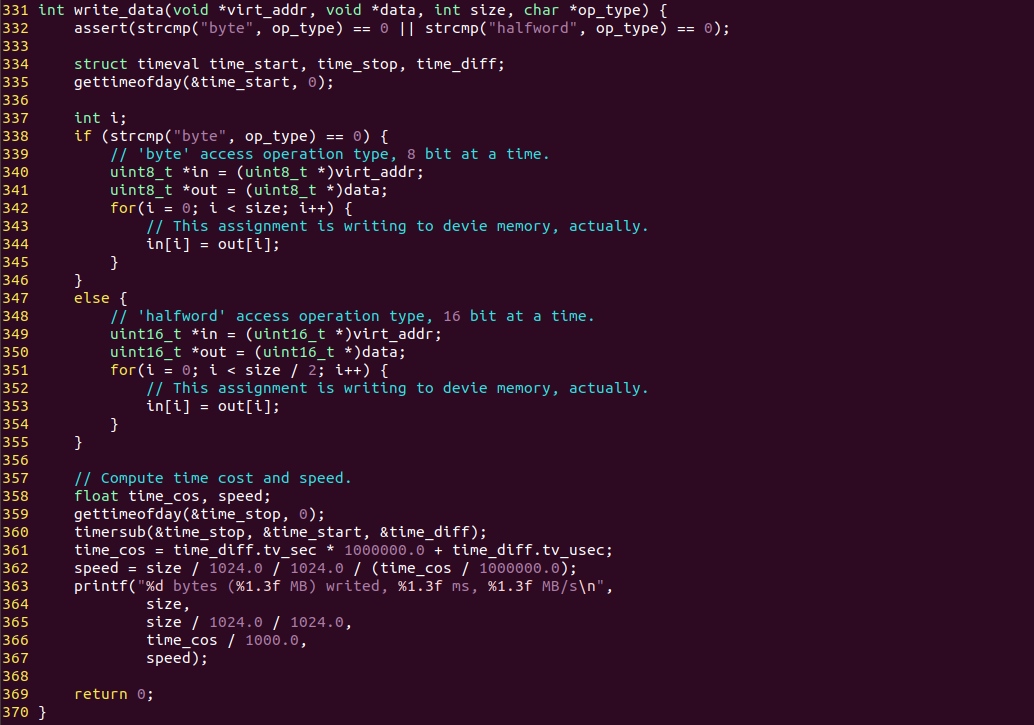
图 44