摘要 : 本文面向 IIoT 开发者 ,深度解析电梯梯控安全隔离 的电气解耦 实践。我们探讨了 EC6200 机器人梯控系统 如何通过非侵入式 采集、安全模块 和高可靠性 保障,确保机器人梯控系统 不干预电梯核心控制。
导语 : 电梯梯控系统 的接入,对于开发者 而言,其技术核心在于实现物理隔离 和电气解耦 。如何优雅地采集电梯状态,并安全地发送指令,是实现安全合规 的关键。
开发者实践:电梯梯控的非侵入式与安全模块的电气解耦
一、 架构挑战:物理隔离与电气解耦
电梯梯控系统 的安全隔离 挑战在于:
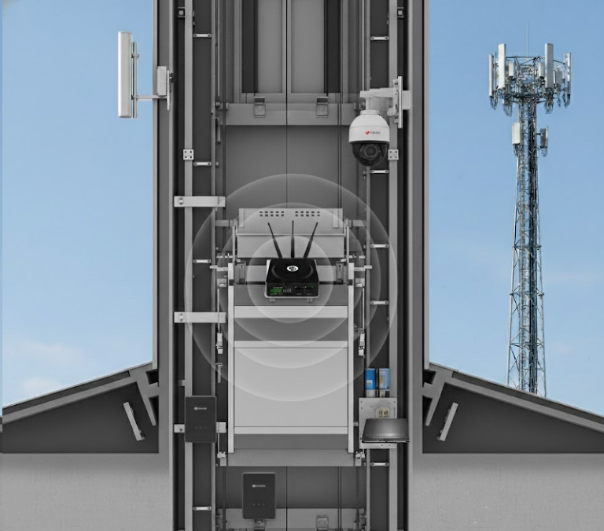
- 物理隔离 :必须采用非侵入式 采集,实现无损安装 。
- 电气解耦 :指令信号必须与电梯控制系统在电气上完全隔离。
二、 核心技术:非侵入式采集与安全模块
EC6200 采用的技术实践:
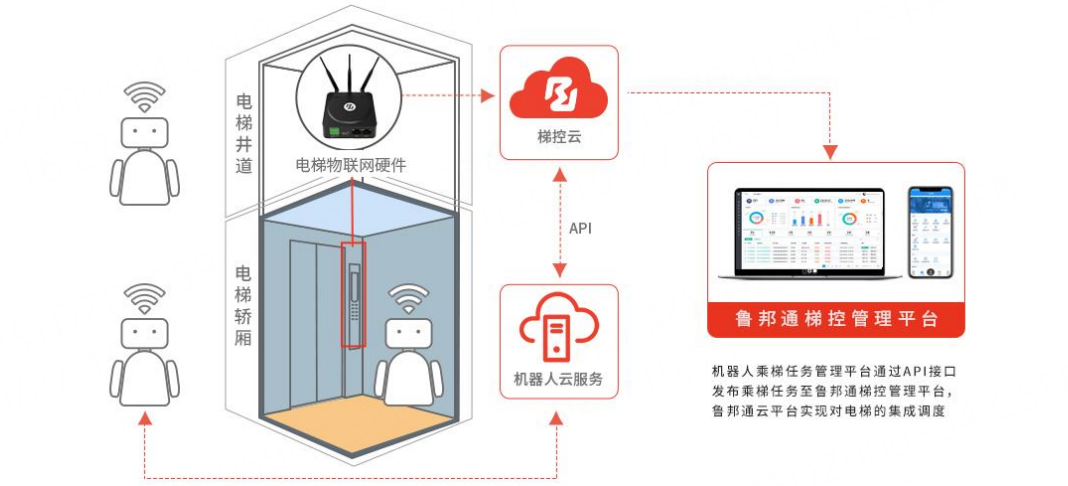
- 非侵入式采集 :系统具备电梯运行状态的自主学习和自行校准 能力,通过外部传感器获取状态。
- 电气隔离 :通过安全模块 (独立继电器)将梯控指令信号进行隔离,防止电压或电流的干扰影响电梯原有控制 。
- 高可靠性 :EC6200 满足高电磁兼容性(EMC) ,防止干扰导致系统故障。
三、 价值保障:安全合规与高可靠性
电梯梯控安全隔离 的最终价值是保障人机安全并存 和系统高可靠性 。
- 人机安全 :保障核心控制隔离 ,防止调度系统故障蔓延至电梯。
- 高可靠性 :通过 全井道信号覆盖 和网络冗余,确保调度指令的稳定送达。
常见问题解答 (FAQ)
- 问题1 :非侵入式 采集如何实现核心控制隔离 ?
- 答 :通过外部传感器采集状态,实现了免破线无损安装 ,避免了对电梯主线的修改。
- 问题2 :安全模块 在电气隔离中的作用?
- 答 :用于在电气层面隔离梯控指令信号,防止电压或电流干扰影响电梯原有控制 。
- 问题3 :高可靠性 对安全隔离 的意义?
- 答 :保障梯控系统自身稳定运行,防止误操作,是实现人机安全并存 的前提。
总结 : 鲁邦通 EC6200 机器人梯控系统 的电梯梯控安全隔离 架构,通过非侵入式 设计、安全模块 和高可靠性 保障,确保了机器人梯控系统 不影响电梯原有控制,实现了安全合规 的 IIoT 接入。