论文题目:Progressive Correspondence Regenerator for Robust 3D Registration(用于鲁棒3D配准的渐进对应再生器)
会议:CVPR2025
摘要:获得足够高质量的通信对于鲁棒的配准至关重要。现有的对应关系优化方法大多采用异常值去除的范式,要么无法正确识别极端异常值比下的准确对应关系,要么选择的正确对应关系太少,无法支持鲁棒的配准。为了解决这一挑战,我们提出了一种名为Regor的新方法,它是一种渐进的对应再生器,可以生成更高质量的匹配,同时对许多异常值具有足够的鲁棒的。在每次迭代中,我们首先使用先验引导的局部分组和广义相互匹配来生成局部对应。然后提出了一种强大的中心感知三点一致性来实现局部对应校正,而不是去除。此外,我们采用全局对应细化,从全局角度获得准确的对应。通过渐进式迭代,这个过程产生了大量高质量的通信。在室内和室外数据集上的大量实验表明,所提出的Regor显著优于现有的离群值去除技术。更重要的是,我们的方法获得比异常值去除方法多10倍的正确对应。因此,我们的方法即使在弱特征下也能实现鲁棒的配准。
一、论文概览
这篇发表在CVPR 2025的论文提出了一种名为**Regor (Progressive Correspondence Regenerator)**的创新方法,用于解决3D点云配准中的对应点质量问题。论文来自厦门大学、中山大学等机构的研究团队。
核心创新 :与传统的"删除异常点"思路不同,Regor采用"生成高质量对应点"的策略,能够将正确对应点数量提升10倍以上。
二、问题分析
2.1 现有方法的困境
当前3D点云配准主要面临以下挑战:
1. 初始对应点质量差
- 在低重叠、高噪声场景下,特征匹配会产生大量错误对应点
- 初始正确对应点(inliers)占比极低,常常不足1%
2. 传统方法的局限性
现有方法分为两类:
- 几何方法(如RANSAC、SC²-PCR):基于几何一致性删除异常点
- 学习方法(如PointDSC、VBReg):将问题视为分类任务
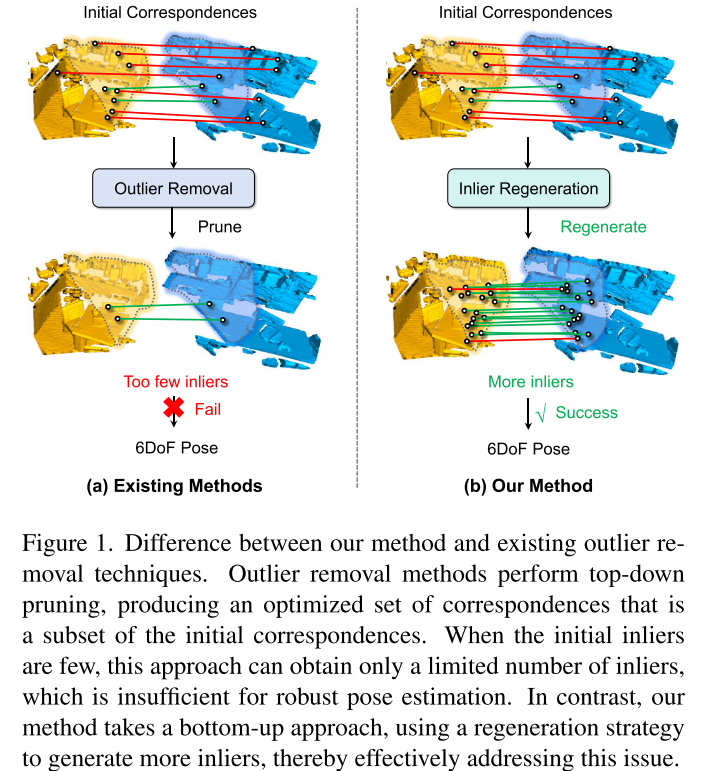
核心问题:这些方法都采用"自上而下的剪枝"策略(如图1(a)所示),只能从初始对应点中筛选,当初始正确对应点很少时,即使全部识别出来也无法支持鲁棒配准。
论文通过实验数据揭示了这个问题的严重性:
- 在异常点率超过99%的场景中,SC²-PCR平均只能获得不到1个正确对应点
- 配准成功率仅为9.15% (3DMatch)和3.28%(3DLoMatch)
三、创新方法:Regor
3.1 核心思想
Regor采用**"自下而上的再生"**策略(如图1(b)所示):
- 不是删除错误对应点,而是渐进式生成更多高质量对应点
- 利用前一阶段对应点的位置先验引导局部区域的精细化匹配
3.2 方法架构
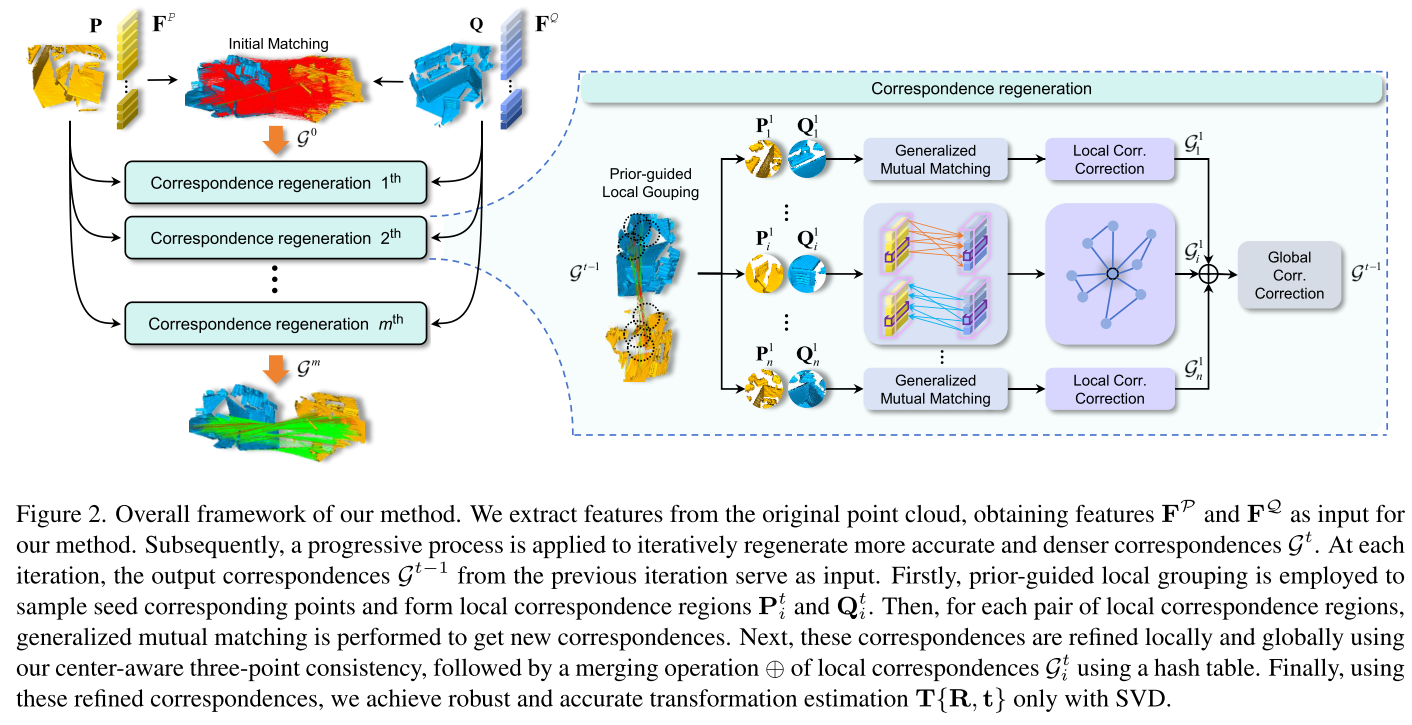
整体框架包含三个核心模块:
模块1:局部分组与重匹配
(1)先验引导的局部分组
- 从前一阶段的对应点中采样种子点
- 以种子点为中心,在半径r^t内进行邻域搜索,构建局部点云对
- 数学表达:

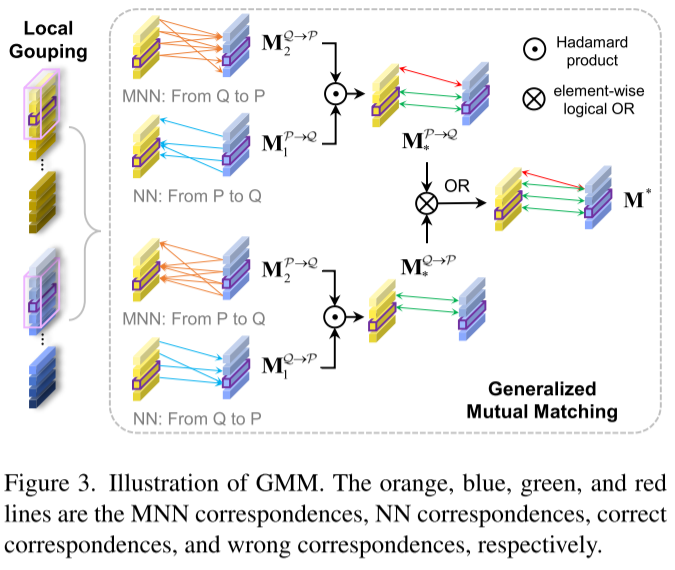
(2)广义互匹配(GMM)
这是论文的一大创新点。传统互匹配(mutual matching)在局部区域特征相似时往往找不到任何匹配,而GMM通过放松约束解决了这个问题:

其中:
- M_1:最近邻匹配矩阵
- M_2:多近邻匹配矩阵
- ⊙:Hadamard积(逐元素相乘)
- ⊗:逐元素逻辑或运算
如图所示,GMM能够在保证一定准确性的同时,生成更多候选对应点。
模块2:局部对应点精化
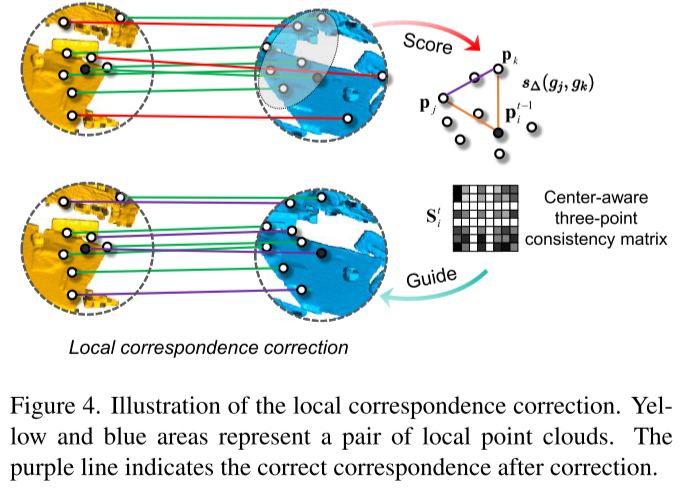
中心感知三点一致性(CTC)
这是Regor的另一个关键创新。传统的三点一致性只考虑三个点对之间的关系,而CTC利用了种子对应点的高可靠性:

其中:
- g^(t-1)_i 是来自前一阶段的中心种子点(精度高)
- 通过中心点作为"桥梁"评估其他对应点的一致性
- 如图所示,这种策略能更准确地识别正确对应点
局部对应点校正
识别高质量对应点后,利用它们估计局部变换T^t_i{R^t_i, t^t_i},然后对整个局部区域的对应点进行校正:
模块3:全局对应点精化
- 对应点合并:使用哈希表高效合并n个局部区域的对应点,去除重复
- 全局校正:使用二阶一致性从全局视角进一步优化,纠正局部可能出现的错误
3.3 渐进式策略
Regor采用多阶段迭代(通常m=4次迭代):
- 初期:较大的搜索半径(如r¹=0.6m)确保全局性和鲁棒性
- 后期:逐渐减小半径(如r⁴=0.15m)实现精确收敛
如图6所示,通过4个阶段的迭代:
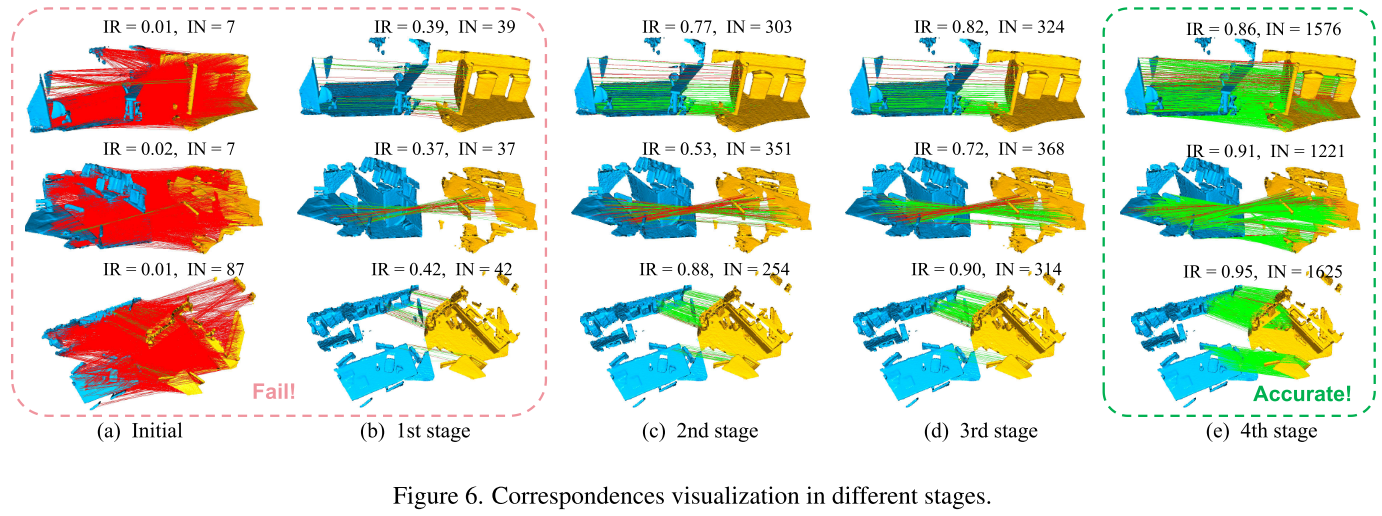
- 初始阶段:仅7个正确对应点,错误率99%
- 最终阶段:生成1500+个正确对应点,准确率95%
四、实验结果
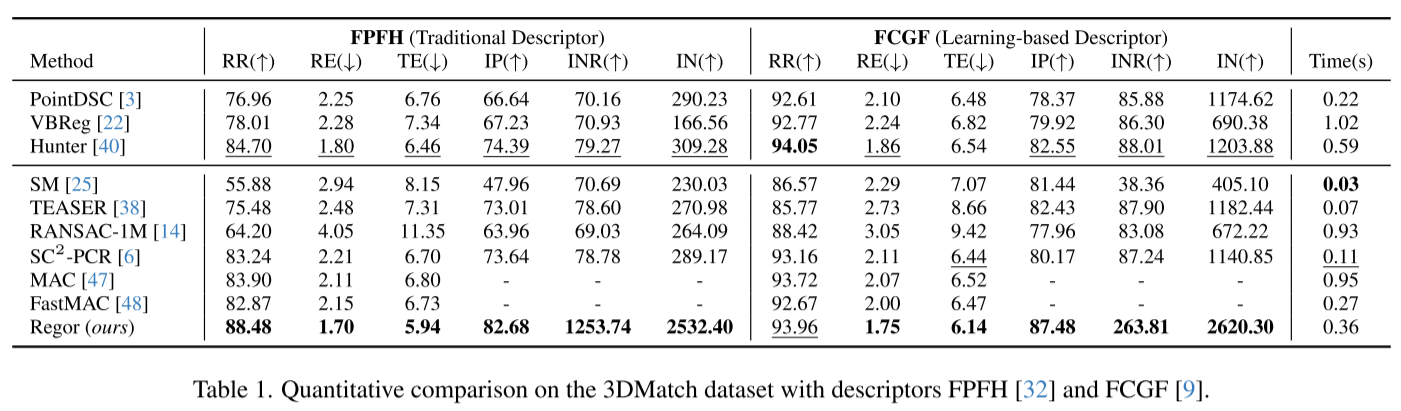
4.1 3DMatch数据集(室内场景)
使用FPFH(传统描述子)的结果:
| 方法 | RR(%) | RE(°) | TE(cm) | IP(%) | INR(%) | IN |
|---|---|---|---|---|---|---|
| SC²-PCR | 83.24 | 2.21 | 6.70 | 73.64 | 78.78 | 289 |
| MAC | 83.90 | 2.11 | 6.80 | - | - | - |
| Regor | 88.48 | 1.70 | 5.94 | 82.68 | 1253.74 | 2532 |
关键发现:
- 配准成功率提升5.2个百分点
- 正确对应点数量是SC²-PCR的8.75倍
- INR(对应点增长率)达到1253.74%,远超传统方法的上限100%
使用FCGF(学习描述子)的结果:
| 方法 | RR(%) | INR(%) | IN |
|---|---|---|---|
| Hunter | 94.05 | 88.01 | 1204 |
| SC²-PCR | 93.16 | 87.24 | 1141 |
| Regor | 93.96 | 263.81 | 2620 |
即使使用强特征,Regor仍能将对应点数量提升2.3倍。
4.2 3DLoMatch数据集(低重叠场景)
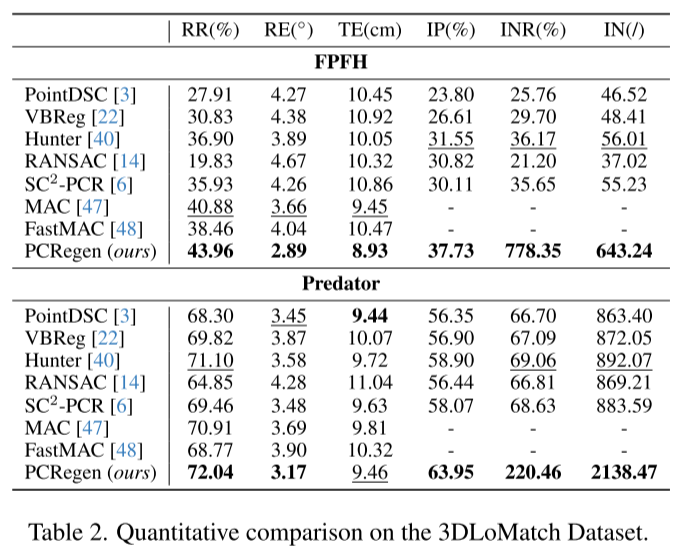
使用FPFH的对比(更具挑战性):
| 方法 | RR(%) | RE(°) | IN |
|---|---|---|---|
| MAC | 40.88 | 3.66 | - |
| FastMAC | 38.46 | 4.04 | - |
| Regor | 43.96 | 2.89 | 643.24 |
突破性表现:
- 传统描述子+Regor的性能(43.96%)超过了学习描述子(Predator 68.30%)在该场景下的一般表现
- INR高达778.35%
4.3 3DMatch-EOR基准(极端异常点场景)
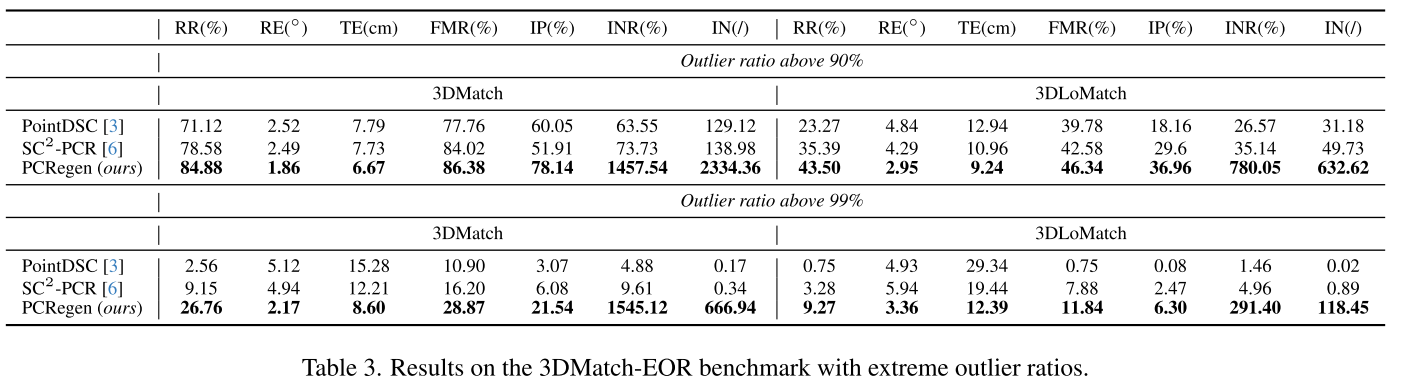
这是论文提出的新基准,专门测试极端情况:
异常点率>99%的场景:
| 方法 | 3DMatch RR(%) | 3DMatch IN | 3DLoMatch RR(%) |
|---|---|---|---|
| PointDSC | 2.56 | 0.17 | 0.75 |
| SC²-PCR | 9.15 | 0.34 | 3.28 |
| Regor | 26.76 | 666.94 | 9.27 |
震撼数据:
- 当SC²-PCR平均只有不到1个正确对应点时,Regor能生成667个
- 对应点数量提升约2000倍!
- 配准成功率从9.15%提升到26.76%(17.61个百分点)
4.4 KITTI数据集(室外场景)
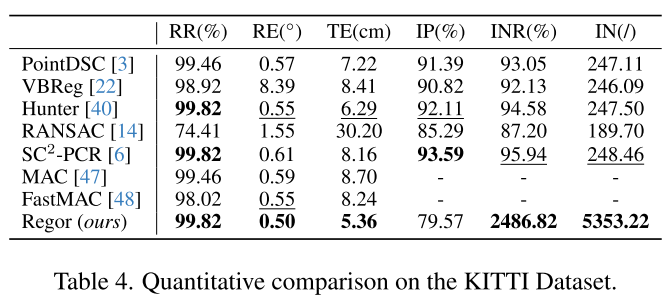
| 方法 | RR(%) | RE(°) | TE(cm) | INR(%) | IN |
|---|---|---|---|---|---|
| RANSAC | 74.41 | 1.55 | 30.20 | 87.20 | 190 |
| SC²-PCR | 99.82 | 0.61 | 8.16 | 95.94 | 248 |
| Regor | 99.82 | 0.50 | 5.36 | 2486.82 | 5353 |
在室外大场景中:
- 正确对应点数量达到5353个 ,是SC²-PCR的21.6倍
- 平移误差降低到5.36cm(最优)
4.5 不同特征描述子的鲁棒性测试
这是论文最令人印象深刻的结果之一:
传统描述子的性能提升:
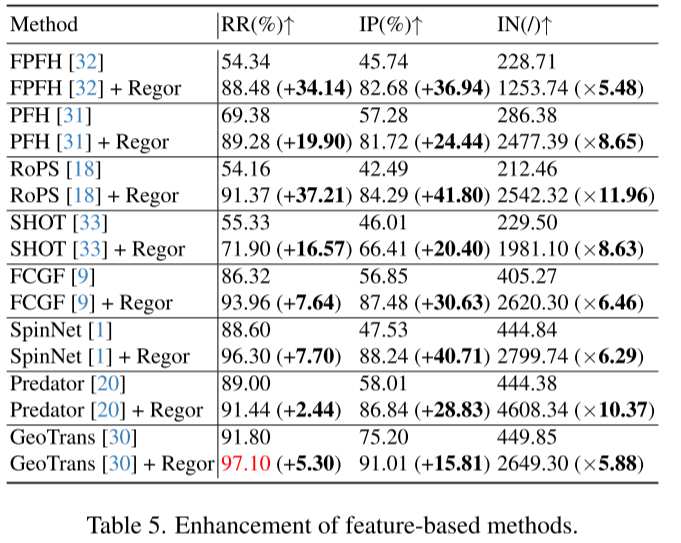
| 描述子 | 原始RR(%) | +Regor RR(%) | 提升 | INR(%) |
|---|---|---|---|---|
| FPFH | 54.34 | 88.48 | +34.14 | 1253.74 |
| RoPS | 54.16 | 91.37 | +37.21 | 2542.32 |
| SHOT | 55.33 | 71.90 | +16.57 | 1981.10 |
学习描述子的性能提升:
| 描述子 | 原始RR(%) | +Regor RR(%) | 提升 | INR(%) |
|---|---|---|---|---|
| GeoTrans | 91.80 | 97.10 | +5.30 | 2649.30 |
| SpinNet | 88.60 | 96.30 | +7.70 | 2799.74 |
| Predator | 89.00 | 91.44 | +2.44 | 4608.34 |
关键发现:
- RoPS(传统描述子)+Regor达到91.37%,超过了FCGF(86.32%)等学习描述子的单独使用
- 如图7所示,使用Regor后,传统描述子的性能全部达到88%以上
- 证明Regor能让"弱特征"实现鲁棒配准
4.6 消融实验
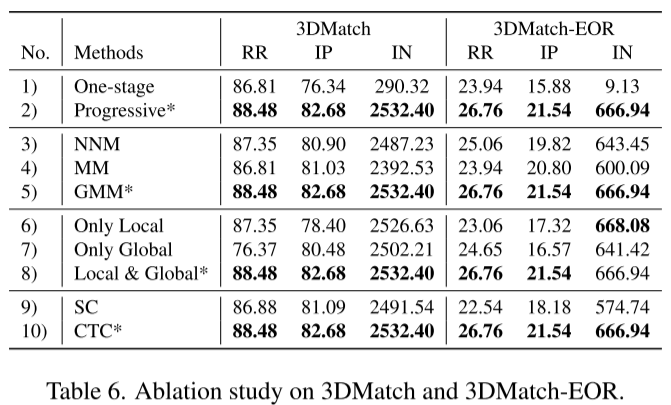
渐进式vs单阶段:
- 单阶段:RR=86.81%, IN=290
- 渐进式:RR=88.48%, IN=2532(提升8.7倍)
匹配策略对比:
- 最近邻匹配(NNM):IN=2487
- 互匹配(MM):IN=2392
- 广义互匹配(GMM):IN=2532(最优)
局部-全局精化:
- 仅局部:RR=87.35%, IP=78.40%
- 仅全局:RR=76.37%, IP=80.48%
- 局部+全局:RR=88.48%, IP=82.68%(性能互补)
五、方法优势总结
5.1 理论创新
- 范式转变:从"删除异常点"到"生成对应点"
- 渐进式策略:从粗到精,利用位置先验逐步优化
- 广义互匹配:解决局部特征相似导致的匹配失败问题
- 中心感知一致性:利用高质量种子点引导局部优化
5.2 性能优势
- 对应点数量 :比现有方法多10-2000倍
- 极端场景鲁棒性:在99%异常点率下仍能成功配准
- 特征通用性:对弱特征也能实现鲁棒配准
- 效率:0.36秒处理时间(与VBReg的1.02秒相比更快)
5.3 实际应用价值
- 机器人定位:在GPS拒止环境下的精确导航
- 自动驾驶:多帧点云融合与建图
- 遥感测绘:低重叠、高噪声场景的配准
- 工业检测:不完整扫描数据的对齐
六、技术细节与实现
6.1 关键参数设置
- 迭代次数:m=4
- 半径序列:r¹=0.6m → r⁴=0.15m(逐渐减小)
- 种子点采样:使用高效随机采样
- 一致性阈值:σ(根据数据集调整)
6.2 计算复杂度
- 哈希表合并:O(n)时间复杂度
- CTC计算:比二阶一致性(SC)更高效
- 局部处理:并行化友好
6.3 可视化分析
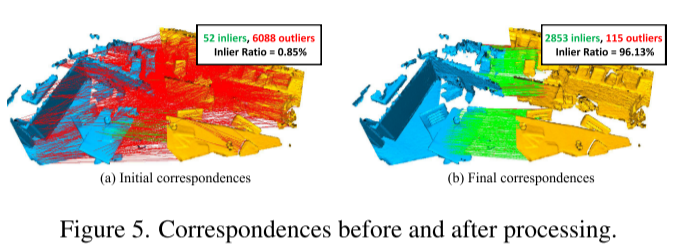
如图5所示,一个典型案例:
- 初始 :52个正确对应点,6088个错误对应点(异常点率99.15%)
- 最终 :2853个正确对应点,115个错误对应点(准确率96.13%)
这种"化腐朽为神奇"的能力是Regor的核心优势。
七、局限性与未来方向
虽然论文未明确讨论局限性,但可以推测:
- 参数敏感性:不同场景可能需要调整半径序列
- 特殊几何:对称或重复结构可能仍具挑战性
- 实时性:虽然0.36秒已很快,但某些应用仍需进一步优化
未来方向:
- 自适应参数选择
- 与端到端学习方法结合
- 扩展到非刚性配准
八、结论
Regor代表了3D点云配准领域的一次重要突破。它通过"对应点再生"这一创新范式,从根本上解决了传统方法在极端异常点场景下的失效问题。
核心贡献:
- ✅ 理论创新:提出渐进式对应点再生框架
- ✅ 技术突破:10倍对应点数量提升
- ✅ 鲁棒性:在99%异常点率下仍能工作
- ✅ 通用性:让弱特征也能实现鲁棒配准
数据说服力:
- 在3DMatch上:88.48% RR,2532个正确对应点
- 在极端场景:对应点数量提升2000倍
- 跨描述子:RoPS+Regor达到91.37%,超越学习方法
这项工作为后续研究提供了新的思路:当数据质量不佳时,不要只想着删除,还可以尝试生成更好的数据。这一理念或许也能应用到其他计算机视觉任务中。