查看ubuntu版本:
lsb_release -a
一、系统要求
-
系统版本:Ubuntu 22.04 (Jammy Jellyfish)
-
架构:amd64(x86_64)或 arm64(如 Jetson / Orange Pi)
-
网络要求 :可访问外网(apt 源需要能访问
packages.ros.org)
二、安装步骤
1.设置本地环境
sudo apt update && sudo apt install -y locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
2.添加 ROS 2 软件源
官方 apt 源
sudo apt install -y software-properties-common
sudo add-apt-repository universe
sudo apt update
添加 ROS 2 的 GPG key:
sudo apt install -y curl
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
添加 ROS 软件源:
echo "deb arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg http://packages.ros.org/ros2/ubuntu (. /etc/os-release \&\& echo UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
3.安装 ROS 2 Humble 桌面版
sudo apt update
sudo apt upgrade -y
sudo apt install -y ros-humble-desktop
如果你只想安装基础版(不含 RViz、Gazebo)
sudo apt install ros-humble-ros-base
4.设置环境变量
每次打开新终端,都需要加载 ROS 环境:
source /opt/ros/humble/setup.bash
为了自动加载,把上面这一行加进 ~/.bashrc:
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
source ~/.bashrc
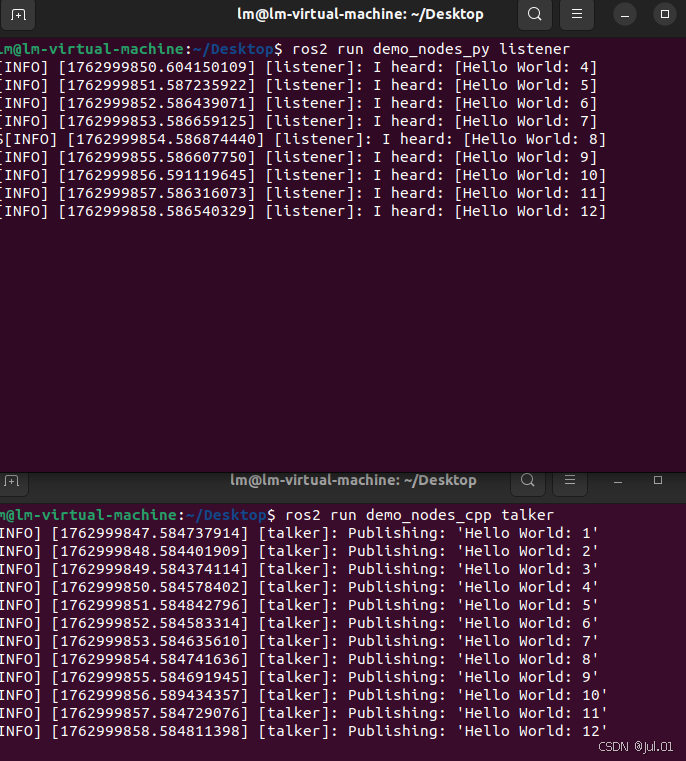
5.验证安装
开两个终端分别执行
ros2 run demo_nodes_cpp talker
ros2 run demo_nodes_py listener