11月13日,宇树科技官网推出了人形机器人数采训练全栈解决方案,该解决方案包括:人形机器人本体G1-D 、数据采集工具 和模型训练及推理工具 三大部分。目标在于为智能体的进化提供核心数据燃料。

一、 机器人本体 G1-D
G1-D 是宇树科技基于 G1 改造的首款轮式机器人,分为通用版 与旗舰版 ,核心差异在于**++是否配备移动底盘++**。旗舰版配置有移动底盘,内置 30Ah 大容量电池,续航达 6 小时;通用版无移动底盘,9Ah 电池置于上身,续航约 2 小时。


****备注:1)以上参数,在不同业务场景、不同型号参数配置等情况,在应用中有所差异,请以实际为准。2)配置表中红色字体部分表示旗舰版与通用版存在差异的配置项目。
在自由度方面,G1-D旗舰版整机自由度为19(不含末端)。其中,单个手臂各有7自由度,腰部有2自由度,立柱有1自由度,底盘有2自由度。而G1-D通用版因为没有配置移动底盘,因此比旗舰版少2个自由度为17个。

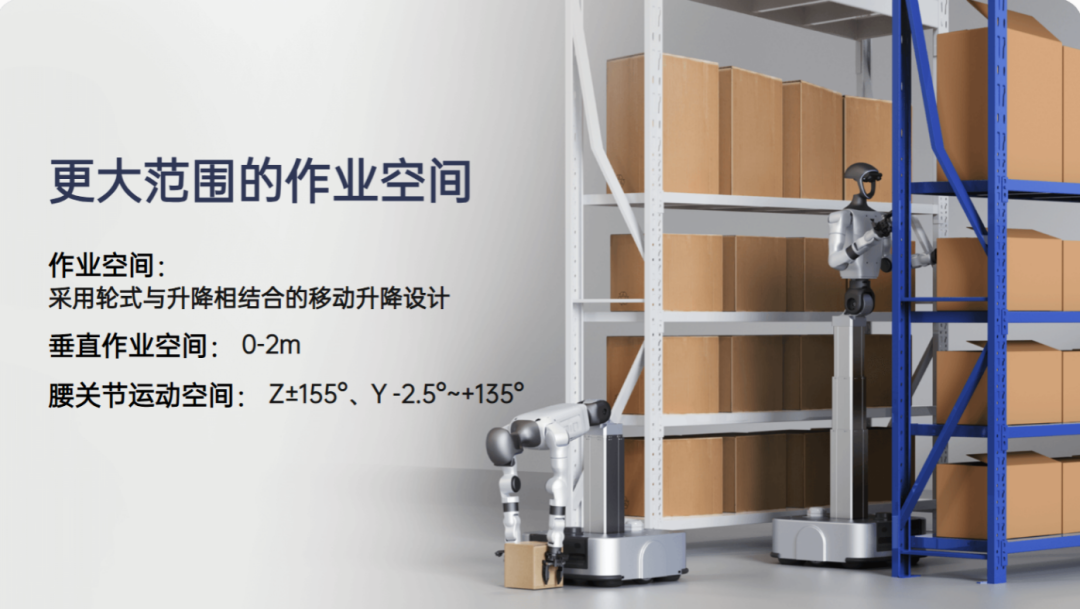
****在作业方面,****G1-D 采用轮式与升降相结合的移动升降设计,兼顾作业灵活性和覆盖范围。
移动底盘速度为1.5 m/s,并且支持原地 360° 旋转;腰关节可实现Z 轴 ± 155° 范围旋转 、Y 轴 - 2.5° 至 + 135° 运动空间,在搭配升降垂直立柱,垂直作业空间为0~2米。另外,单臂最大负载可达 3 kg,末端支持选配二指夹爪、三指灵巧手(无触觉)、三指灵巧手(有触觉)和五指灵巧手,可适配多种作业需求。
****在控制响应方面,****系统遥操延时﹤100ms,这意味着从操作员发出指令到机器人开始执行,延迟时间极短,赋予机器人"本能级"的实时响应。采集频率为60Hz,即机器人每秒采集60次自身状态(如关节位置、力度)和环境数据。
低延时(<100ms) 和 高采集频率(60Hz) 共同保证了机器人 "反应快、感知细" ,为精准控制提供了实时数据基础。
另外,末端夹爪精度±0.1mm,是确保G1-D能够稳定、可靠地完成诸如精准拾取微小零件、进行电路板插接、操作精密仪器等精细操作任务的前提条件。升降精度 ±0.5mm,确保G1-D在货架取放、跨高度工作台切换等作业精准到位。搭配末端夹爪微操作,可实现从宏观定位到微观操作的全程精准协同。

二、 数据采集工具
整个数据采集流程包括:数据采集任务、任务编辑与分配、数据采集与标注、数据上传与审核、数据存储 以及数据导出六大环节。

宇树科技通过标准化流程 和可重构场景,提升场景数据采集效率,降低传统采集方式的成本。该系统化的数据采集工具具有以下特点:
1) 可视化模版管理 ****:****集项目管理、任务分配、进度追踪与状态分析于一体,通过模板化配置,一键生成数据采集任务,全流程状态实时跟踪,协作更顺畅,采集更高效。
2) 多样化本体及采集末端 ****:****以"多样化兼容"为设计核心,支持多种机器人与末端配置的数据采集,具备强大的数据标准化能力,确保从多元设备到高质量模型训练数据的端到端打通。
3) 高并发架构 ****:****具备支撑数百台机器人同步开展数据采集的技术能力。通过高并发架构与负载均衡调度,确保海量数据流的实时接收与处理,为构建高质量的数据集提供基础。
4)支持 7*24小时在线采集 ****:****平台构建于高可用的服务架构之上,支持7×24小时可靠采集,具备强大的格式兼容能力,采集数据可直接输出或转换为各类主流训练格式,提升研发效率。
三、模型训练与推理工具
整个模型训练与推理流程包括:模型架构选择 、训练配置 、实时监控 、参数编辑 、仿真测试 以及模型导出与部署六大环节。该工具平台支持从数据处理到模型训练、仿真测评及一键部署的工作流,平台无缝集成集成多种主流的机器人开源模型框架,让开发者能在一个统一的平台上,高效完成整个研发与部署流程。

该工具链平台具有以下特点:
****1)生态丰富,支持主流模型:****构建开放式的模型生态,内置社区数据集,支持开源数据集训练。在模型架构选择环节,支持选择GR00T、PI0.5、WorldVLA以及Unitree WMA等业界主流的具身智能VLA模型。
2) 仿真环境,模型评测 ****:****内置高保真、高精度的3D资产库,通过构建仿真环境,快速生成覆盖全面的评测方案,为算法验证提供支撑。
****3)简单易用,快速部署:****开箱即用,通过"一键训练"快速启动模型开发,并利用集成的仿真工具进行可靠评估,最终实现算法到真机的无缝迁移。
4) 分布式训练,高效性能 ****:****平台基于高性能分布式训练架构,可实现计算任务的弹性调度与并行加速,按负载资源动态扩展,实现90% GPU利用率。
四、应用场景
宇树科技正以G1人形机器人平台为核心,推动"应用场景多元化"战略的逐步落地。
王兴兴之前曾多次提到,宇树机器人要"先运动,再干活"。通过G1-Comp(足球赛事)和G1-Boxing(拳击项目)等应用方案,宇树科技成功验证了其机器人在复杂环境下的运动控制能力,实现了"先运动"的目标。
最新推出的基于G1-D的数据采集方案,或许标志着宇树科技的战略重点开始从"运动"向"干活"进行转变。
该方案作为"人形机器人数采训练全栈解决方案",在全身遥操作平台的支持下,G1-D能够完成前台接待、叠衣服、整理货架、设备巡检等多种任务,覆盖服务、生活、商业及工业等多个场景。

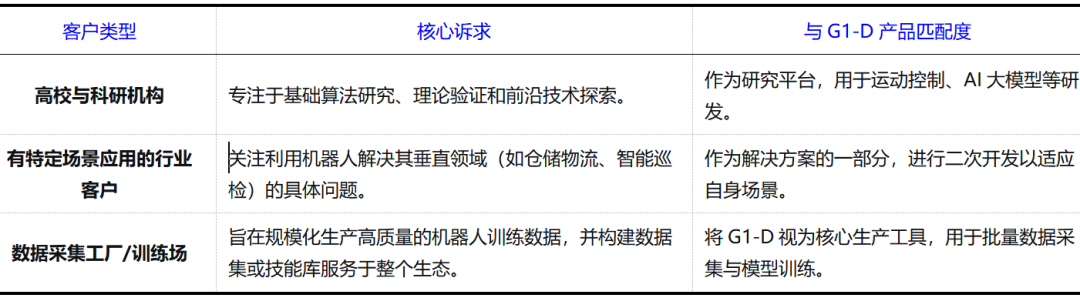
据推测,宇树科技该套解决方案面向的主要客户群体应该包括:高校 与 科研 机构 、 有特定场景应用的行业客户 以及数据采集工厂/训练厂。
宇树科技正在尝试将已验证的运动控制 和精准操作 等核心能力,系统性地转化为**"能干活"**的实际应用价值。通过提供数据采集与训练全栈解决方案,公司不仅拓展了自身产品的应用边界,更重要的是助力整个行业积累训练数据,加速人形机器人在工业、商业及家庭场景的落地进程。