目录

1.摘要
无人机辅助的移动边缘计算(MEC)系统为移动智能终端(MITs)提供了额外的计算能力,成为一种具有潜力的技术。本文旨在优化多无人机(UAVs)辅助MEC系统中为大量MITs提供服务时的能效。为此,本文提出了一种两层回溯搜索算法(TBSA),TBSA的上层通过将回溯搜索算法(BSA)与基于广义对立学习的自适应种群调整策略相结合,优化UAV的部署;下层则根据上层算法得到的AAV部署情况,确定卸载决策和资源分配。在下层中,定义了随机优先级序列(RPS)来描述MITs的卸载决策,并采用BSA来寻找最优的RPS。
2.问题描述
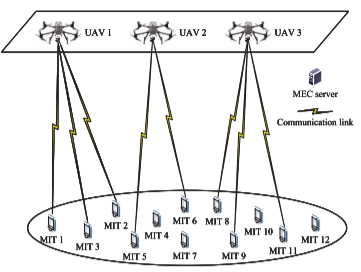
论文研究了一个多无人机辅助的移动边缘计算(MEC)系统,旨在优化系统的能效。系统包括UAV、MEC服务器和MITs,任务可以在UAV或MIT本地执行,其提出了两层回溯搜索算法(TBSA)来优化UAV部署和MIT任务卸载决策。能量消耗包括UAV悬停、任务的本地执行和UAV执行的计算任务。通过数学模型和假设,系统的能量消耗由UAV的悬停功率、传输功率、计算资源和带宽等因素构成。任务卸载决策和资源分配通过矩阵 λ \lambda λ和 φ \varphi φ进行描述。
悬停能量消耗
当系统工作时,UAV处于悬停模式,能耗表示为:
E A A V = P H T H E_{\mathrm{AAV}}=P_HT_H EAAV=PHTH
期中, P H P_H PH为悬停功率, T H T_H TH为悬停时间。
本地执行能耗
本地执行指的是任务 M i M_i Mi在 M I T i MIT_i MITi上进行计算,这会消耗 M I T i MIT_i MITi的能量。计算任务 M i M_i Mi所需的时间 T L , i T_{L,i} TL,i和能量 E L , i E_{L,i} EL,i:
T L , i = N i ϕ i , 1 , i ∈ 1 , N M T_{L,i}=\frac{N_i}{\phi_{i,1}},i\in1,N_M TL,i=ϕi,1Ni,i∈1,NM
E L , i = α 1 ( ϕ i , 1 ) 2 N i , i ∈ 1 , N M E_{L,i}=\alpha_1\left(\phi_{i,1}\right)^2N_i,i\in1,N_M EL,i=α1(ϕi,1)2Ni,i∈1,NM
MEC执行过程能耗
MEC执行包括三个阶段:任务从 M I T i MIT_i MITi传输到 UAV,UAV上进行计算,然后将结果返回 M I T i MIT_i MITi,上行数据速率:
R u , i , j = W log 2 ( 1 + P M β 0 G 0 N 0 W δ 2 ∥ m i − U j ∥ 2 ) R_{u,i,j}=W\log_2\left(1+\frac{P_M\beta_0G_0}{N_0W\delta^2\left\|\boldsymbol{m}_i-\boldsymbol{U}_j\right\|^2}\right) Ru,i,j=Wlog2(1+N0Wδ2∥mi−Uj∥2PMβ0G0)
计算时间和能量:
T M , i , j = N i ϕ i , j + 1 + η 1 D i R u , i , j + η 2 D i R d , i , j T_{M,i,j}=\frac{N_i}{\phi_{i,j+1}}+\frac{\eta_1D_i}{R_{u,i,j}}+\frac{\eta_2D_i}{R_{d,i,j}} TM,i,j=ϕi,j+1Ni+Ru,i,jη1Di+Rd,i,jη2Di
E M , i = α 2 ( ϕ i , j + 1 ) 2 N i + P M η 1 D i R u , i , j + P S η 2 D i R d , i , j E_{M,i}=\alpha_{2}\left(\phi_{i,j+1}\right)^{2}N_{i}+\frac{P_{M}\eta_{1}D_{i}}{R_{u,i,j}}+\frac{P_{S}\eta_{2}D_{i}}{R_{d,i,j}} EM,i=α2(ϕi,j+1)2Ni+Ru,i,jPMη1Di+Rd,i,jPSη2Di
目标函数
系统能耗 E s Es Es:
E S = ∑ i = 1 N M λ i , 1 E L , i + ∑ i = 1 N M ∑ j = 1 N U λ i , j + 1 E M , i + N U E A A V E_{S}=\sum_{i=1}^{N_{M}}\lambda_{i,1}E_{L,i}+\sum_{i=1}^{N_{M}}\sum_{j=1}^{N_{U}}\lambda_{i,j+1}E_{M,i}+N_{U}E_{\mathrm{AAV}} ES=i=1∑NMλi,1EL,i+i=1∑NMj=1∑NUλi,j+1EM,i+NUEAAV
3.提出算法
TBSA上层算法通过BSA设计自适应种群调整策略,优化UAV的部署:
X = { X 1 , Y 1 , H ⏟ A A V 1 , X 2 , Y 2 , H ⏟ A A V 2 , ... X N U , Y N U , H ⏟ A A V N U } X=\left\{\underbrace{X_{1},Y_{1},H}{\mathrm{AAV~1}},\underbrace{X{2},Y_{2},H}{\mathrm{AAV~2}},\ldots\underbrace{X{N_{U}},Y_{N_{U}},H}{\mathrm{AAV~N{U}}}\right\} X=⎩ ⎨ ⎧AAV 1 X1,Y1,H,AAV 2 X2,Y2,H,...AAV NU XNU,YNU,H⎭ ⎬ ⎫
通过BSA生成候选种群-I (XCI)。然后,设计了三个候选种群-II (XCII,1, XCII,2, XCII,3),这些种群通过插入、替换和移除操作生成。插入操作:在X中插入一个新个体,通过GOBL生成新个体。替换操作:随机替换X中的一个个体。移除操作:随机移除X中的一个个体。
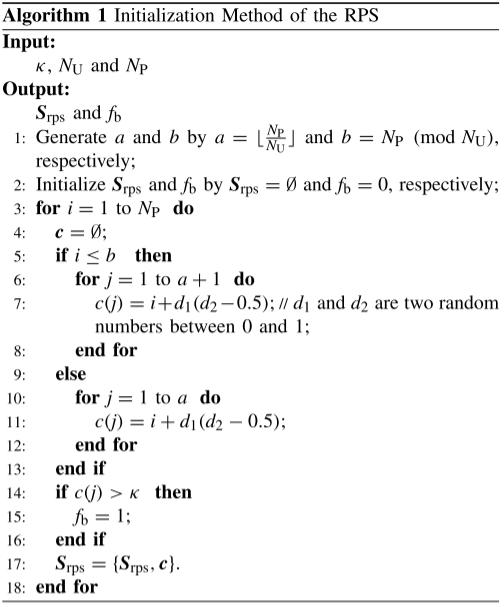
下层算法在基于上层算法获得的候选种群(XCII,1, XCII,2, XCII,3)搜索最优卸载决策,引入随机优先级序列(RPS),其长度与上传任务的MIT数量相同。通过生成并优化随机优先级序列(RPS)来确定任务卸载决策。任务优先选择本地执行,超出处理能力时上传到UAV。

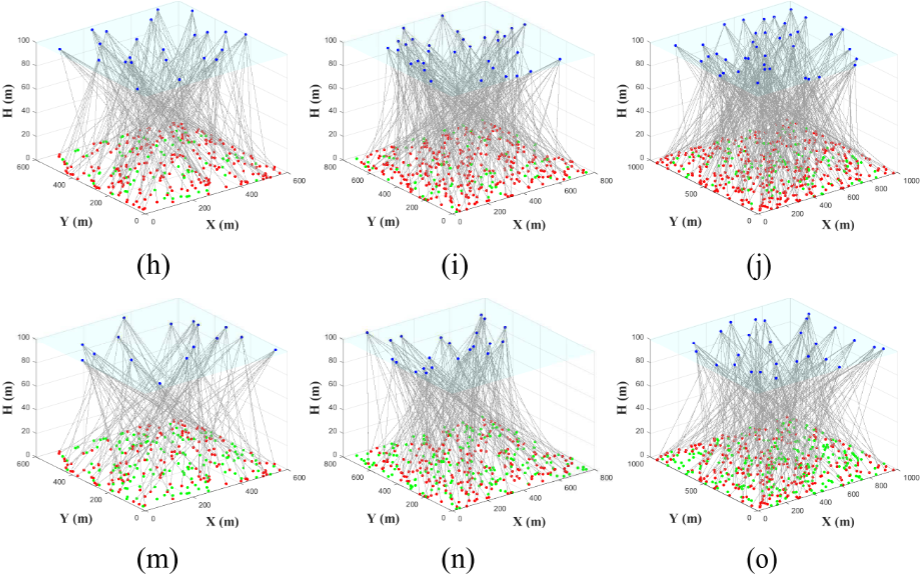
4.结果展示
5.参考文献
1 Zhang Y. Energy-Efficient Deployment and Offloading Strategy in a Multi-UAV-Assisted MEC SystemJ. IEEE Internet of Things Journal, 2025.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx