在精密制造领域,工件的细节直接对产品质量产生影响。尤其是那些尺寸小巧、结构复杂的小型结构件(如1cm-10cm级别的零件),其微妙的曲面、精细的纹理、潜在的缺陷或微小的尺寸偏差,往往是影响产品性能、装配精度甚至使用寿命的关键因素。
新拓三维推出的XTOM-MATRIX系列高精度蓝光三维扫描仪,配备多种幅面工业相机镜头,测量精度可达6微米,在捕获工件细节特征方面具有出色的实力,可用于检测各类中小型精密零部件的各种线性尺寸、角度尺寸和形位公差,为精密制造行业提供高效、精准的几何尺寸测量解决方案。

项目难点与挑战
1、"中小尺寸"挑战: 中小尺寸零部件特征细节非常微小,对扫描设备的精度、分辨率和稳定性要求更高。普通3D扫描设备极易丢失细节或产生噪点。
2、 "复杂结构"难题:复杂结构零部件,往往具有复杂的曲面、倒角、孔洞和纹理。如何完整捕捉所有表面信息,是扫描过程中的一大难点。
3、精度要求高:需精确获取细节尺寸数据,用于后续质量控制与制造,对最终数据的准确性要求苛刻。
蓝光三维扫描-精准还原尺寸信息和几何特征
针对中小尺寸精密零部件,新拓三维XTOM-MATRIX高精度蓝光三维扫描仪,凭借微米级精度和500-900万像素的高质量工业相机,能够精准还原尺寸信息和几何特征(细节)。
01竞赛自行车配件
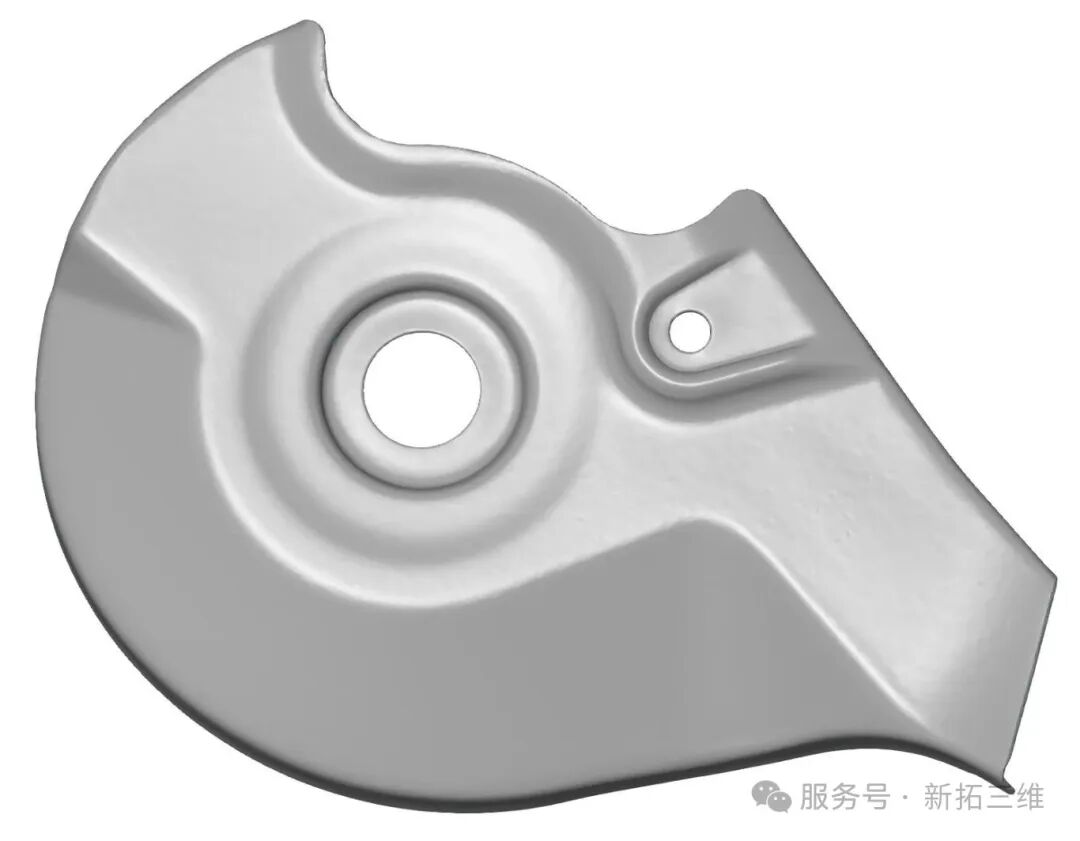
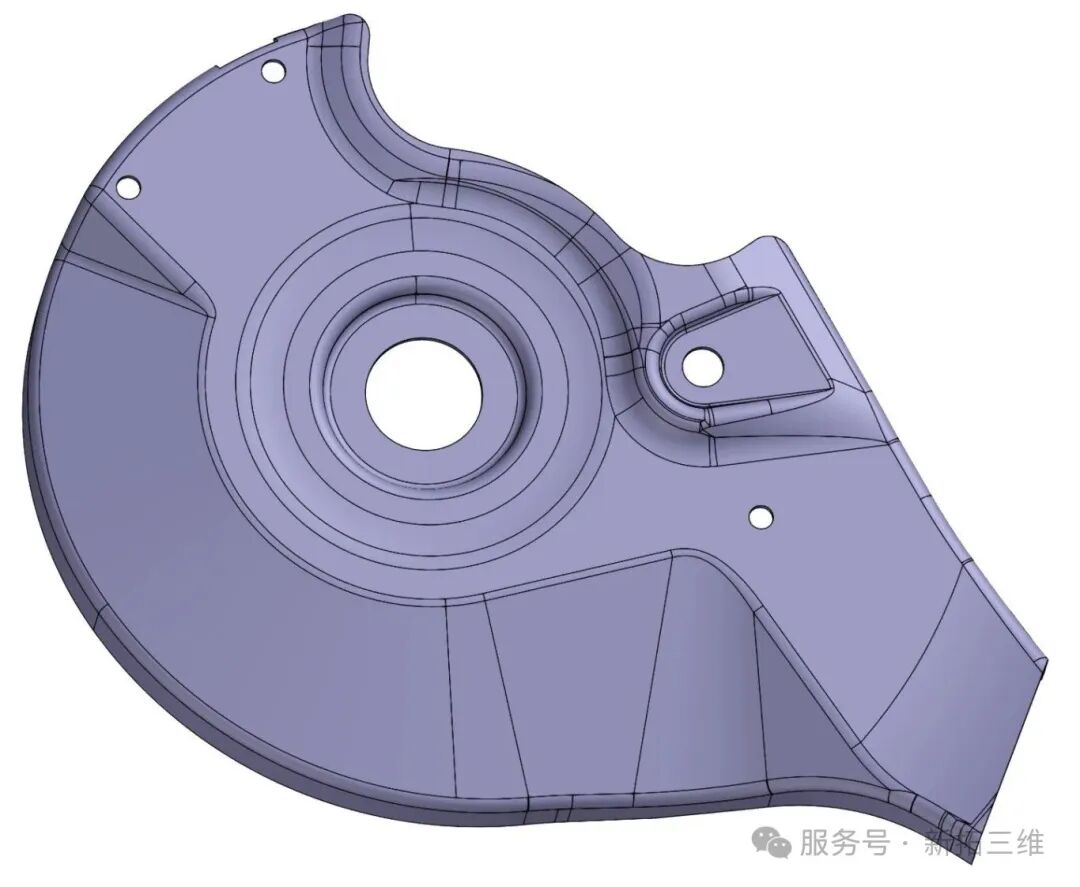

· 小配件全尺寸高精度测量
· 轮廓扭曲、孔距、孔径部位形状等测量
· 配件表面平整度、凹凸等三维数据信息
......
XTOM蓝光三维扫描仪在扫描小尺寸配件时,能够清晰地还原凹凸曲面、孔位及孔距的细微结构,也能精准捕获各个细节特征,避免出现漏检。
02电动升降桌压铸件


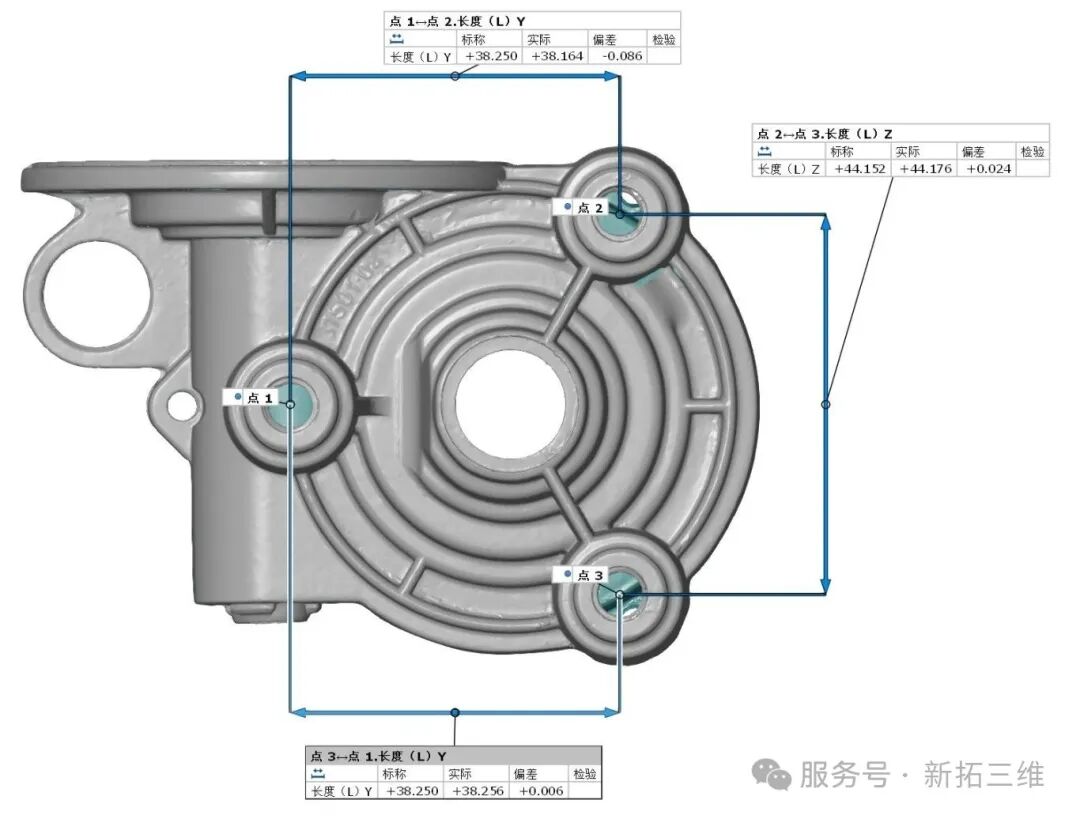
· 压铸件全尺寸3D检测
· 曲面、安装孔、凹槽等复杂几何结构测量
· 呈现形位偏差、孔位及孔径偏差情况
......
升降桌压铸件外壳表面有着众多的曲面、安装孔、凹槽等复杂几何结构,XTOM蓝光三维扫描仪能够快速且准确地获取其完整三维数据,结合三维检测软件,可清晰呈现形位偏差、孔位及孔径偏差情况。
03 自动饮水机塑胶件
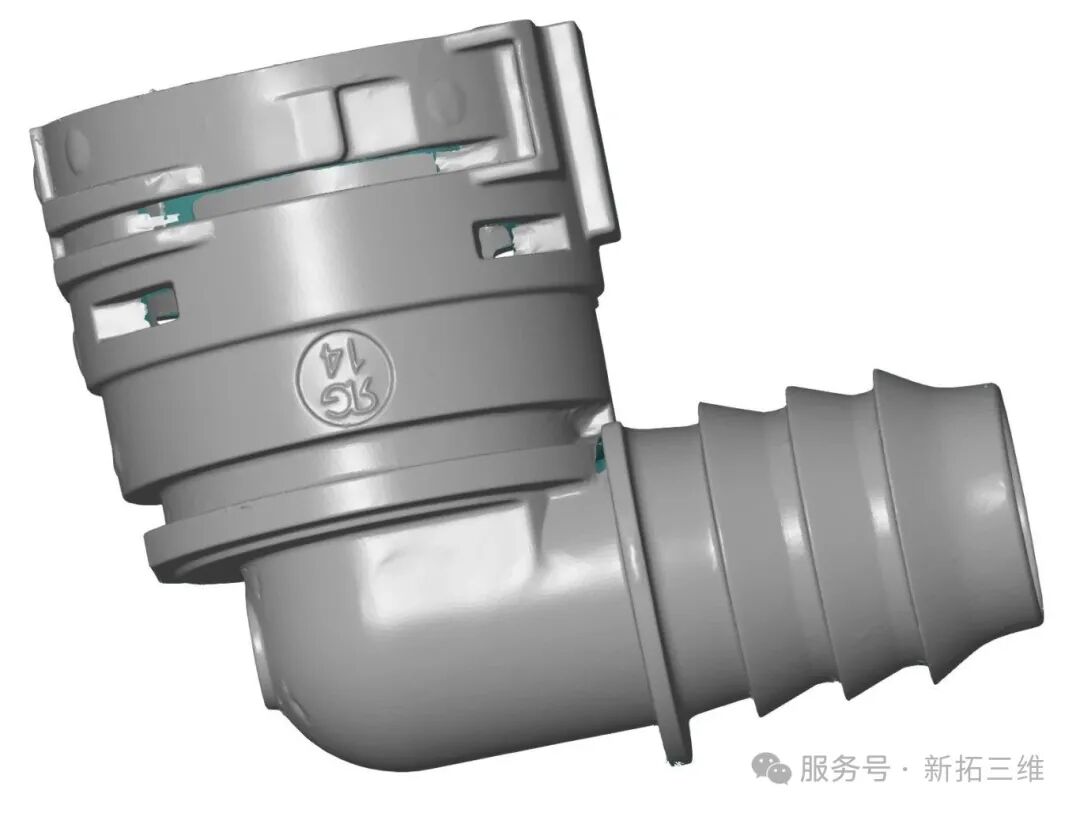


· 塑胶件全尺寸3D检测
· 微小特征(如微孔、微槽、倒角、纹理)三维重建
· 呈现形位偏差、孔位及孔径偏差情况
......
塑胶件具有大量外表面细节,微小特征(如微孔、微槽、倒角、纹理)难以精准捕捉;采用XTOM-MATRIX高精度蓝光三维扫描仪,可提升复杂结构塑胶件检测的效率与精度,具有出色的微小细节还原能力。
04 机器狗转动轴配件

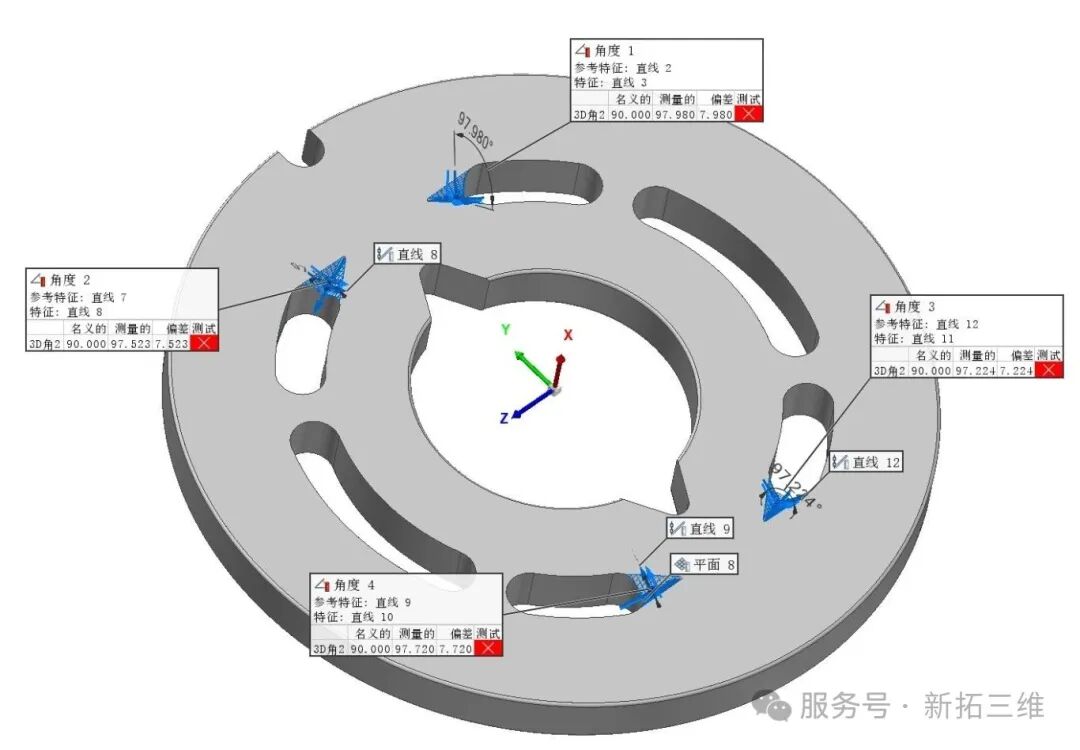
· 装配类结构件全尺寸3D检测
· 凹孔与镂空结构三维重建
· 呈现形位偏差、孔位及装配结构偏差情况
......
对于装配类结构件,XTOM-MATRIX蓝光三维扫描仪可将其从整体结构到局部细节完整地扫描下来,实现凹孔与镂空结构精确测量,确保装配精度。
05 模具电极


· 判断电极是否达到电火花加工标准
· 测头可深入扫描零件狭窄深处位置
· 电极表面最小的形状偏差可清晰显示
......
XTOM-MATRIX蓝光三维扫描仪能够对模具电极进行1:1还原扫描,精确捕捉模具电极表面的高精细度特征,快速获取其三维数据,与设计模型进行比对,检测产品的尺寸偏差、型面偏差等,确保模具电极加工的精确度。
06 汽车方向盘配件


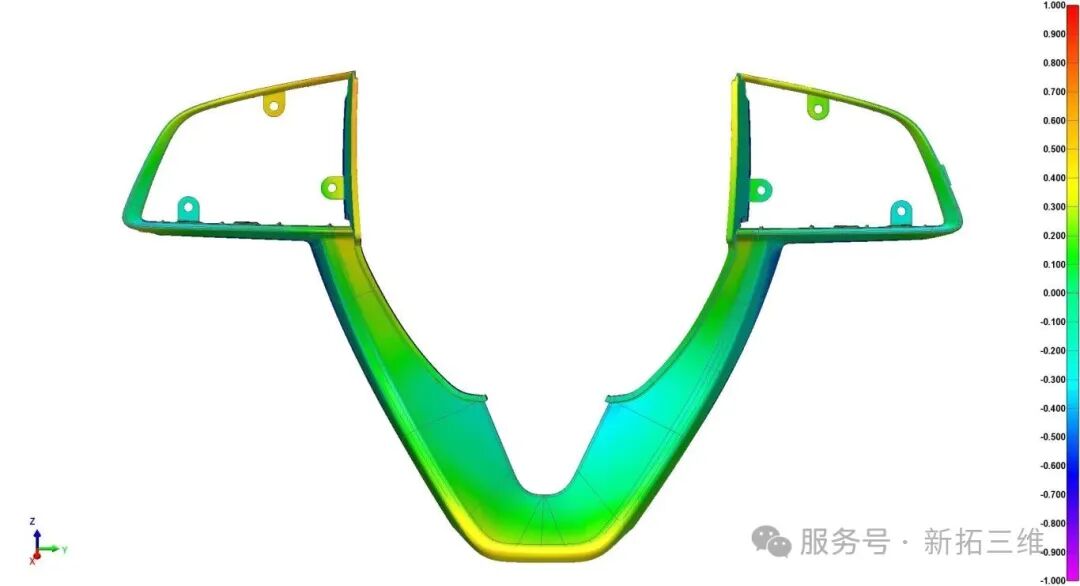
· 高密度点云数据采集获取
· 复杂表面特征、精细的边缘轮廓、多装配孔位检测
· 汽车注塑零部件表面形状偏差分析
......
在XTOM-MATRIX蓝光三维扫描仪的高密度点云数据扫描采集下,具有复杂表面特征、精细的边缘轮廓以及多装配孔位的汽车方向盘配件无所遁形,实现全尺寸偏差检测。
07 汽车保险杆塑胶件


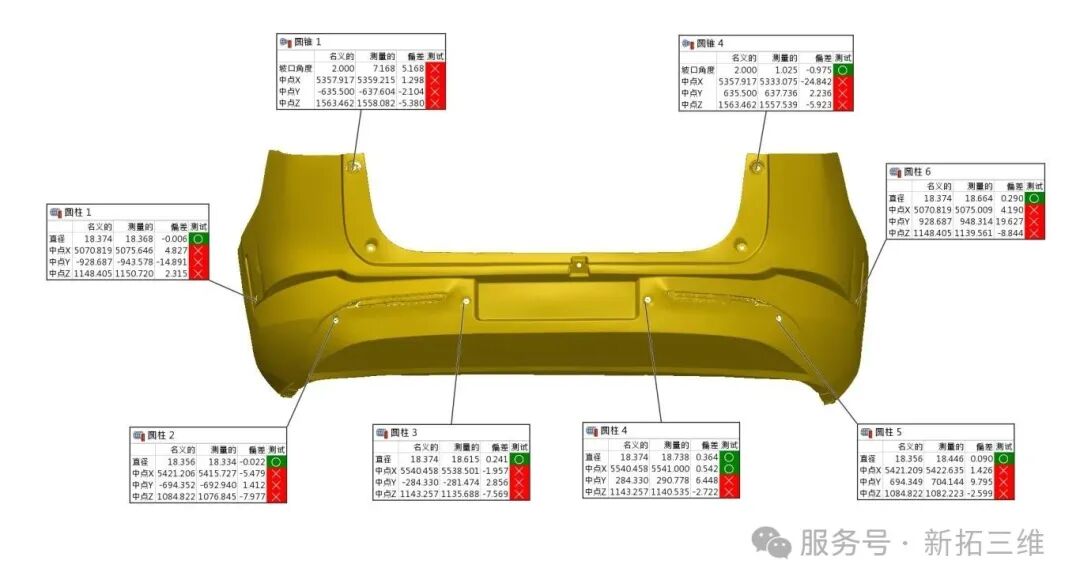
· 捕捉汽车保险杆塑胶件凹槽结构和表面细节
· 结合三维检测软件进行3D全尺寸检测
· 严格控制产品公差误差范围内,以保障产品后续组装
......
XTOM-MATRIX蓝光三维扫描仪能够深入捕捉汽车保险杆塑胶件凹槽结构和表面细节,扫描数据精度高且完整,结合三维检测软件进行3D尺寸检测,可将产品严格控制在误差范围内,以保障产品后续组装。