基本原理
Canny 边缘检测是一种经典且常用的图像边缘提取算法,由 John Canny 在 1986 年提出。它在 OpenCV 中得到了高效实现,是结构化光、SLAM、医学影像分析与机器视觉领域中最常用的边缘检测方法之一。其目标是以最优方式识别图像中的边缘,既能准确检测真实边缘,又能保持较强的抗噪能力与定位精度。
Canny 算法之所以经典,是因为它通过数学推导给出了边缘检测的三个最优准则:
- 检测率高(Good Detection):尽可能找到真实边缘;
- 定位准确(Good Localization):检测到的边缘点应准确落在真实边缘位置;
- 一次响应(Minimal Response):相同边缘只产生一条响应,避免多条边缘线。
Canny 算法实现包含 5 个关键步骤:
第一步:噪声抑制(Gaussian Blur)
边缘通常对应灰度变化剧烈的区域,但噪声也会产生剧烈变化。如果不去噪,边缘会出现大量虚假响应。因此 Canny 算法的第一步是使用高斯滤波进行平滑:
GaussianBlur(src, blur, Size(3,3), 1.0);高斯滤波使用如下数学形式的卷积核:
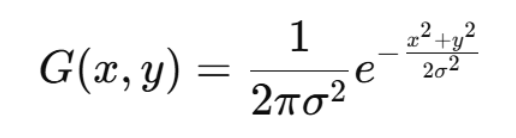
σ 越大,平滑越强,但也会模糊真实边缘。
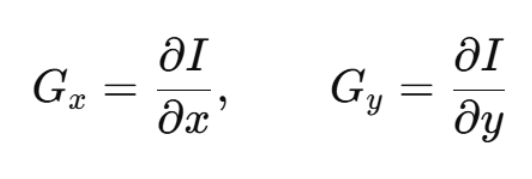
第二步:计算梯度(Sobel)
Canny 使用 Sobel 算子计算图像在水平方向与垂直方向的梯度:
OpenCV 内部相当于:
cpp
Sobel(blur, grad_x, CV_16S, 1, 0);
Sobel(blur, grad_y, CV_16S, 0, 1);然后得到:
梯度幅值:
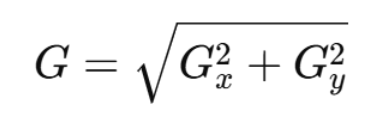
梯度方向:
梯度方向说明边缘的方向,梯度越大表示边缘越强。
第三步:非极大值抑制(NMS)
未经处理的梯度图会出现宽厚的边缘带,这不符合 "一次响应" 原则。NMS 的目标是 细化边缘:
- 根据梯度方向确定像素的比较方向(四种情况:0°、45°、90°、135°)
- 当前像素的梯度如果不是局部最大值,则置为 0
这种方法能有效将粗边缩减为优美细线。
第四步:双阈值检测(Double Threshold)
Canny 的创新点之一就是"双阈值",使用高低两个阈值 T1(低)、T2(高):
- 强边缘:G > T2
- 弱边缘:T1 < G ≤ T2
- 非边缘:G ≤ T1
为何要这样做?
- 边缘是连通的,一个强边缘附近往往会有梯度较弱的像素;
- 如果只用单阈值,弱边可能被直接丢弃;
- 双阈值允许保留"可能属于边缘"的弱像素。
第五步:边缘连接(Hysteresis)
弱边缘并不是全部保留,而是需要与强边缘连接才认为是真实边。
过程如下:
- 对所有强边缘保留;
- 对弱边缘,若与强边相邻(8 连接),则保留;
- 其他弱边缘舍弃。
最终得到干净、连续、不重复的边缘线。
OpenCV 中的 Canny 函数
OpenCV 在 Python 中提供的 Canny 边缘检测函数原型如下:
python
cv2.Canny(image, threshold1, threshold2, edges=None, apertureSize=3, L2gradient=False)1. image(输入图像)
- 类型:
uint8单通道(灰度图) - 说明:如果传入的是彩色图,OpenCV 不会报错,但会自动将像素分量混合,使结果不可控。
建议永远手动转换为灰度图:
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)2. threshold1(低阈值)
- 用于双阈值检测中的"弱边缘"判断。
- 越低 → 保留越多弱边缘(噪声也更多)
- 越高 → 结果越干净,但容易漏掉细节边缘
一般经验:
low = 0.66 * 中位数3. threshold2(高阈值)
- 用于判定"强边缘"
- 边缘必须 > threshold2 才能直接保留为强边
常用经验规则:
threshold2 ≈ 2 × threshold1建议:
- 图像干净 → 高阈值可放宽
- 图像噪声大 → 高阈值应提高
4. edges(输出图像,可忽略)
一般不需要传入,由 OpenCV 创建:
edges = cv2.Canny(image, 50, 150)5. apertureSize(Sobel 算子卷积核尺寸)
- 默认值:
3 - 可选:
3, 5, 7
它决定了梯度计算的卷积核大小(Sobel 算子大小),影响梯度平滑程度。
| apertureSize | 特点 |
|---|---|
| 3 | 默认,精度好 |
| 5 | 边缘更平滑,适合噪声较大图像 |
| 7 | 更强的平滑,适合强噪声环境 |
6. L2gradient(梯度幅值计算方式)
- 默认:
False - 控制梯度幅值计算方法:
False(默认)
使用简单加和:
速度较快,在多数应用中足够。
True
使用更准确的欧几里得距离:
更精确但计算更慢。
如果你对边缘精度要求高,应启用 L2gradient:
python
edges = cv2.Canny(gray, 50, 150, L2gradient=True)示例
python
import cv2
import numpy as np
# 1. 读取图像
img = cv2.imread("test.jpg")
# 检查是否读取成功
if img is None:
raise FileNotFoundError("无法找到图像,请检查路径 test.jpg 是否存在!")
# 2. 转灰度图
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 3. 高斯滤波(Canny 内部也会处理,但建议手动提高效果)
blur = cv2.GaussianBlur(gray, (3, 3), 1)
# 4. 设置 Canny 双阈值
low_threshold = 50
high_threshold = 150
# 5. 执行 Canny 边缘检测
edges = cv2.Canny(
blur,
low_threshold,
high_threshold,
apertureSize=3,
L2gradient=True # 使用更精确的梯度计算
)
# 6. 显示结果
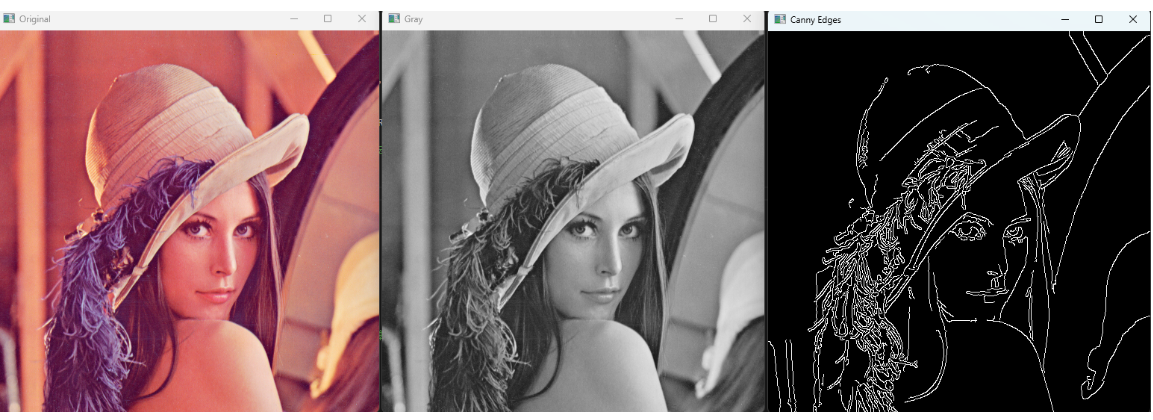
cv2.imshow("Original", img)
cv2.imshow("Gray", gray)
cv2.imshow("Canny Edges", edges)
cv2.waitKey(0)
cv2.destroyAllWindows()执行效果: