前言
在完成地物的逐像元分类后,分类结果易受噪声、影像质量、算法特性等多种因素的干扰,往往会出现孤点、细碎图斑等问题。这些问题会显著降低分类结果的准确性和实用性,因此对分类结果进行后处理十分必要。
常见的分类后处理方法包括滤波、聚类、形态学处理等。这些方法能够有效剔除不合理的像元,让分类结果更加平滑、连续。此外,根据实际需求,有时还需将处理后的结果转换为矢量格式。
为确保分类结果的可靠性,还需要开展精度评价工作。通过混淆矩阵、Kappa系数等指标量化分类结果的准确性,从而为后续的分析与应用提供科学依据。本文将详细介绍在MapGIS中进行分类后处理的具体流程。
分类后处理
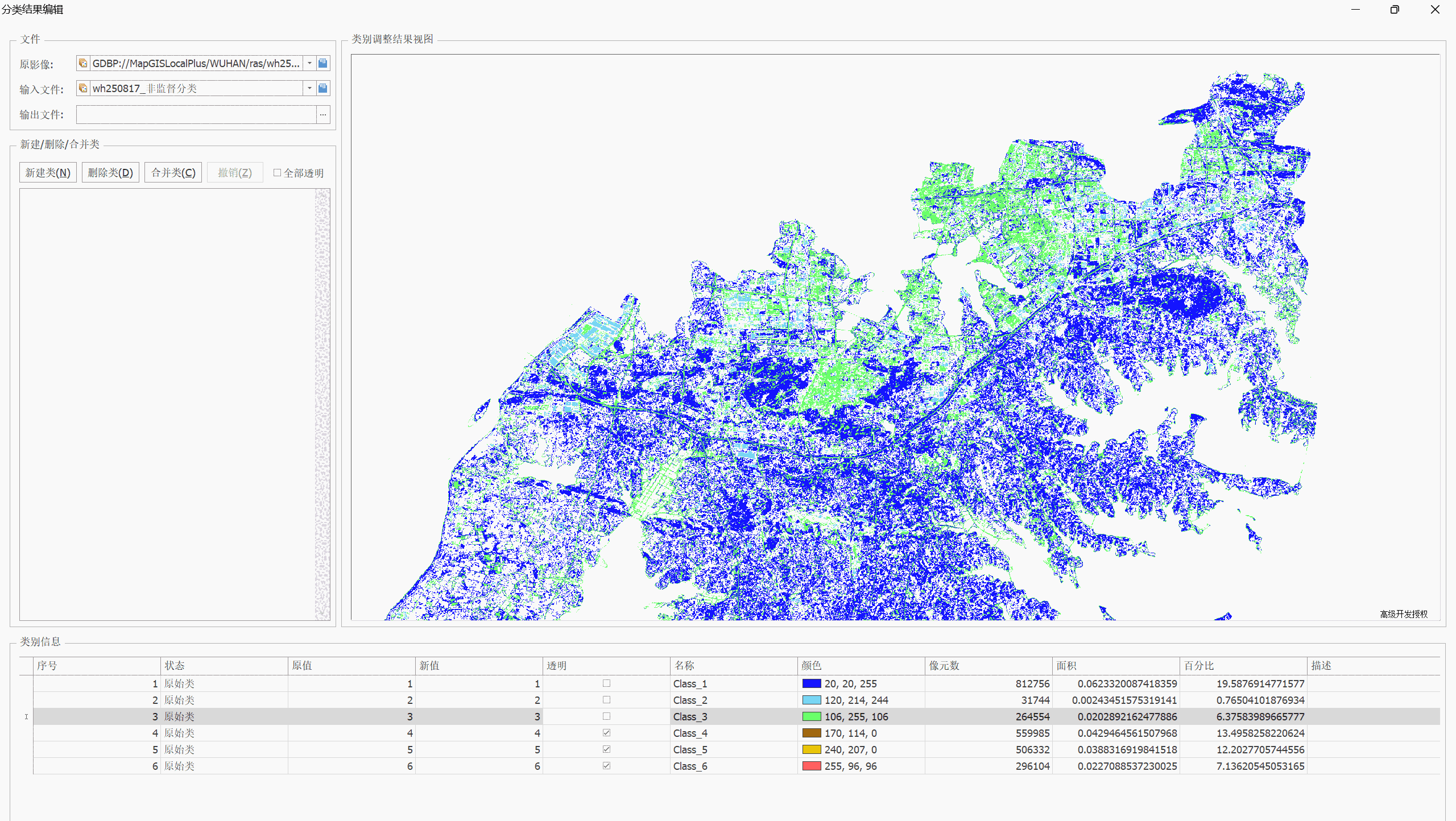
滤波与小斑块合并
在遥感影像完成分类后,往往需要通过后处理来提升分类结果的质量与可用性。其目标是消除噪声、减少碎片斑块,使分类图更加规整、连续,从而提高制图效果和统计精度。
在 MapGIS 中,分类后处理-统计分析-分类结果分析处理工具实现该功能。首先通过聚类统计对分类影像进行邻域分析,得到各类别在局部范围内的分布情况文件,作为后续处理的依据。然后利用过滤分析对分类结果进行平滑,去除孤立像元和椒盐噪声,使区域更加连续。最后通过去除分析,检测并清理面积较小的斑块,将其合并到邻近的主要类别中,减少零碎区域,得到更合理的分类结果。
分类结果合并
通过分类后处理-小区合并工具实现该功能,将多个分类结果文件合并为一个,方便后续的分析和应用。
栅格转矢量
将经过后处理的分类结果转换为矢量格式,便于进行属性编辑、制图等操作。

精度评价
支持通过抽样点或AOI对分类结果进行精度评价,精度评价指标包括误差矩阵、各类精度、总精度和Kappa系数。
- 误差矩阵是一种用于评估分类结果准确性的工具,它展示了分类器将样本分配到不同类别的情况。矩阵的行代表实际类别,列代表分类器预测的类别。每个单元格中的数值表示该分类器将该样本分配到对应类别的次数。通过分析误差矩阵,可以了解分类器在不同类别上的分类性能。
- 各类精度是指分类器在每个类别上的分类准确率,计算公式为该类别被正确分类的次数除以该类别总样本数。
- 总精度是指分类器在所有类别上的平均分类准确率,计算公式为所有类别精度的平均值。
- Kappa系数是一种用于评估分类结果准确性的指标,它考虑了分类器的随机分类准确率和分类结果的绝对准确率。Kappa系数的取值范围为-1, 1,值越接近1表示分类结果越准确,值越接近-1表示分类结果越随机。