WebRTC中的WienerFilter类实现频域维纳滤波器,是噪声抑制模块的核心组件。它通过分析信号与噪声的功率谱密度比,计算最优滤波器系数来抑制背景噪声。算法采用定向决策方法,融合当前和先验信噪比估计,提高滤波稳定性。启动阶段采用平滑过渡策略避免突变,后处理阶段基于语音概率进行自适应增益控制。该滤波器在保持语音质量的同时有效消除噪声,显著改善语音通信的清晰度和可懂度,是实时音频处理中的关键噪声抑制技术。
1. 核心功能
WienerFilter 类实现了维纳滤波器的频域噪声抑制,主要用于语音增强和噪声消除。其核心功能是通过估计信号与噪声的功率谱密度比,计算最优滤波器系数来抑制噪声。
2. 核心算法原理
维纳滤波器基本原理
数学公式:
H(ω) = P_signal(ω) / (P_signal(ω) + P_noise(ω))
= SNR(ω) / (SNR(ω) + 1)源码算法实现
// 核心算法源码中文注释
void WienerFilter::Update(
int32_t num_analyzed_frames,
rtc::ArrayView<const float, kFftSizeBy2Plus1> noise_spectrum,
rtc::ArrayView<const float, kFftSizeBy2Plus1> prev_noise_spectrum,
rtc::ArrayView<const float, kFftSizeBy2Plus1> parametric_noise_spectrum,
rtc::ArrayView<const float, kFftSizeBy2Plus1> signal_spectrum) {
for (size_t i = 0; i < kFftSizeBy2Plus1; ++i) {
// 基于前一帧和当前滤波器计算先验信噪比
// prev_tsa = 前一帧信号谱 / 前一帧噪声谱 × 前一帧滤波器
float prev_tsa = spectrum_prev_process_[i] /
(prev_noise_spectrum[i] + 0.0001f) * filter_[i];
// 计算当前帧的信噪比
// current_tsa = max(信号谱/噪声谱 - 1, 0)
float current_tsa;
if (signal_spectrum[i] > noise_spectrum[i]) {
current_tsa = signal_spectrum[i] / (noise_spectrum[i] + 0.0001f) - 1.f;
} else {
current_tsa = 0.f; // 避免负信噪比
}
// 定向决策估计:融合当前和先验信噪比(加权平均)
// snr_prior = 0.98 × 先验信噪比 + 0.02 × 当前信噪比
float snr_prior = 0.98f * prev_tsa + (1.f - 0.98f) * current_tsa;
// 维纳滤波器核心计算公式
// filter = snr_prior / (过减因子 + snr_prior)
filter_[i] = snr_prior / (suppression_params_.over_subtraction_factor + snr_prior);
// 限制滤波器增益范围 [minimum_attenuating_gain, 1.0]
filter_[i] = std::max(std::min(filter_[i], 1.f),
suppression_params_.minimum_attenuating_gain);
}
// 启动阶段特殊处理:融合初始频谱估计
if (num_analyzed_frames < kShortStartupPhaseBlocks) {
// 启动阶段使用初始估计和当前估计的加权组合
// 随着帧数增加,逐渐过渡到正常滤波器
}
}3. 关键数据结构
主要数据成员
class WienerFilter {
private:
const SuppressionParams& suppression_params_; // 抑制参数配置
std::array<float, kFftSizeBy2Plus1> spectrum_prev_process_; // 前一帧处理谱
std::array<float, kFftSizeBy2Plus1> initial_spectral_estimate_; // 初始谱估计
std::array<float, kFftSizeBy2Plus1> filter_; // 维纳滤波器系数
};参数说明
-
kFftSizeBy2Plus1: FFT 大小的一半加 1(正频率分量) -
SuppressionParams: 包含过减因子、最小衰减增益等参数
4. 核心方法详解
Update 方法
// 更新维纳滤波器系数
// 参数:
// - num_analyzed_frames: 已分析的帧数
// - noise_spectrum: 当前噪声功率谱
// - prev_noise_spectrum: 前一帧噪声功率谱
// - parametric_noise_spectrum: 参数化噪声谱估计
// - signal_spectrum: 输入信号功率谱ComputeOverallScalingFactor 方法
// 计算整体缩放因子,用于后处理增益控制
// 基于语音概率和能量变化调整最终输出增益
float gain = SqrtFastApproximation(energy_after_filtering /
(energy_before_filtering + 1.f));5. 设计亮点
1. 定向决策 (Directed Decision)
// 融合当前估计和先验估计,提高信噪比估计的稳定性
float snr_prior = 0.98f * prev_tsa + (1.f - 0.98f) * current_tsa;2. 启动阶段平滑过渡
// 前 kShortStartupPhaseBlocks 帧使用混合策略
// 逐渐从初始估计过渡到正常维纳滤波
filter_[i] = (初始滤波器 × 剩余权重) + (当前滤波器 × 已处理权重)3. 自适应增益控制
// 基于语音概率的能量缩放
return prior_speech_probability * scale_factor1 +
(1.f - prior_speech_probability) * scale_factor2;6. 典型工作流程
时序图
┌─────────────┐ ┌─────────────┐ ┌─────────────┐
│ 帧 n-1 │ │ 帧 n │ │ 帧 n+1 │
├─────────────┤ ├─────────────┤ ├─────────────┤
│ 频谱分析 │───▶│ 噪声估计 │───▶│ 滤波器更新 │
│ 噪声估计 │ │ 信噪比计算 │ │ 滤波应用 │
│ 滤波器应用 │ │ 滤波器更新 │ │ 增益调整 │
└─────────────┘ └─────────────┘ └─────────────┘流程图
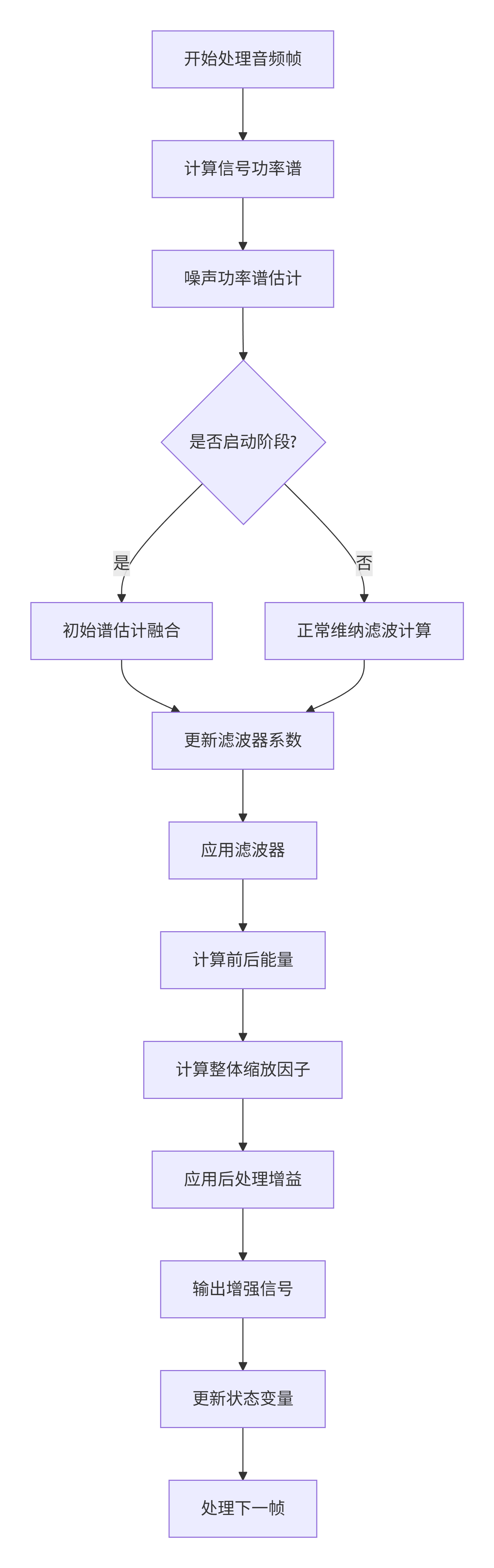
关键处理步骤说明:
-
频谱分析:将时域信号转换为频域功率谱
-
噪声估计:使用噪声估计算法获得噪声功率谱
-
信噪比计算:计算每个频点的信噪比
-
滤波器更新:基于定向决策方法更新维纳滤波器系数
-
滤波应用:在频域应用滤波器系数
-
增益控制:基于语音概率和能量变化调整最终输出
该实现通过结合时域递归和频域处理,在保持语音质量的同时有效抑制噪声,是实际工程中维纳滤波器的经典实现。