V-REP小车项目+匹配文档,基于V-REP与MATLAB联合仿真,小车能够完成循迹、避障、走迷宫和路径规划,提供详细代码和文档说明。
最近在搞一个V-REP小车项目,不得不说,这玩意儿还挺有意思的。V-REP是个强大的机器人仿真平台,加上MATLAB的联合仿真,简直是小车项目的黄金搭档。我们的小车不仅能循迹、避障,还能走迷宫和路径规划,功能相当全面。
先来看看循迹功能的实现。我们通过V-REP的API接口获取小车的传感器数据,然后利用MATLAB进行数据处理。以下是一段简单的MATLAB代码,用于读取传感器数据并进行循迹控制:
matlab
% 读取传感器数据
sensorData = vrep.simxGetStringSignal(clientID, 'sensorData', vrep.simx_opmode_buffer);
% 数据处理
if ~isempty(sensorData)
% 假设传感器数据是一个数组,包含左右传感器的读数
leftSensor = sensorData(1);
rightSensor = sensorData(2);
% 简单的循迹算法
if leftSensor > rightSensor
% 左转
vrep.simxSetJointTargetVelocity(clientID, leftMotor, -0.5, vrep.simx_opmode_oneshot);
vrep.simxSetJointTargetVelocity(clientID, rightMotor, 0.5, vrep.simx_opmode_oneshot);
else
% 右转
vrep.simxSetJointTargetVelocity(clientID, leftMotor, 0.5, vrep.simx_opmode_oneshot);
vrep.simxSetJointTargetVelocity(clientID, rightMotor, -0.5, vrep.simx_opmode_oneshot);
end
end这段代码的核心思想是通过比较左右传感器的读数来决定小车的转向。如果左边传感器读数大于右边,小车就左转,反之则右转。虽然算法简单,但在实际应用中效果还不错。
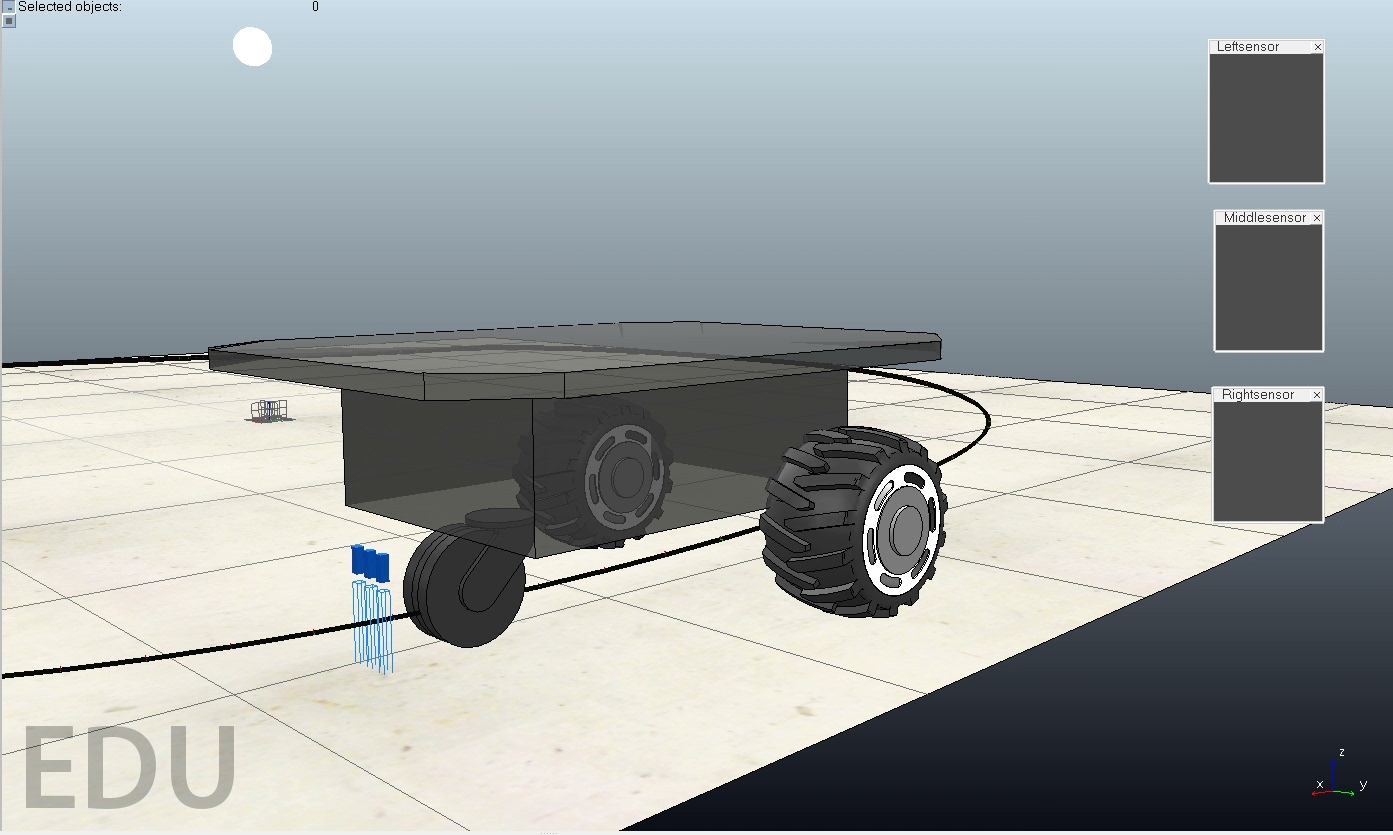
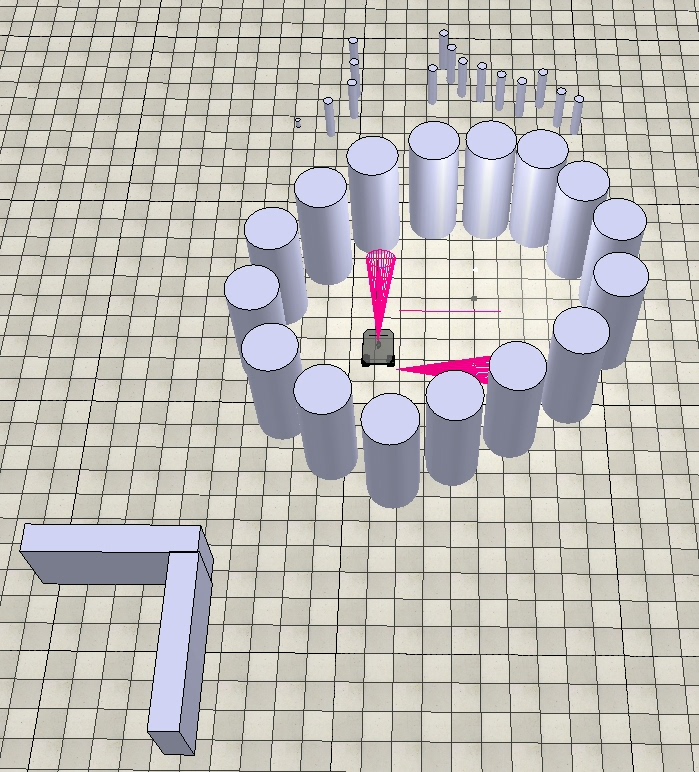
接下来是避障功能。我们使用了V-REP中的超声波传感器来检测障碍物。当传感器检测到障碍物时,小车会自动停止并寻找新的路径。以下是避障控制的MATLAB代码:
matlab
% 读取超声波传感器数据
ultrasonicData = vrep.simxGetStringSignal(clientID, 'ultrasonicData', vrep.simx_opmode_buffer);
% 数据处理
if ~isempty(ultrasonicData)
% 假设超声波传感器数据是一个数值,表示距离
distance = ultrasonicData(1);
% 避障算法
if distance < 0.5
% 停止小车
vrep.simxSetJointTargetVelocity(clientID, leftMotor, 0, vrep.simx_opmode_oneshot);
vrep.simxSetJointTargetVelocity(clientID, rightMotor, 0, vrep.simx_opmode_oneshot);
% 寻找新的路径
% 这里可以调用路径规划算法
end
end这段代码的逻辑也很直接:当超声波传感器检测到障碍物距离小于0.5米时,小车会立即停止,并触发路径规划算法来寻找新的路径。
说到路径规划,我们使用了A算法来实现。A算法是一种常用的路径搜索算法,能够在复杂的环境中快速找到最优路径。以下是A*算法的MATLAB实现:
matlab
function path = AStar(start, goal, map)
% 初始化open和closed列表
openList = start;
closedList = [];
while ~isempty(openList)
% 从open列表中取出f值最小的节点
[~, idx] = min([openList.f]);
currentNode = openList(idx);
% 如果当前节点是目标节点,返回路径
if isequal(currentNode.pos, goal)
path = reconstructPath(currentNode);
return;
end
% 将当前节点从open列表移到closed列表
openList(idx) = [];
closedList = [closedList; currentNode];
% 生成当前节点的邻居节点
neighbors = getNeighbors(currentNode, map);
for i = 1:length(neighbors)
neighbor = neighbors(i);
% 如果邻居节点在closed列表中,跳过
if ismember(neighbor.pos, [closedList.pos], 'rows')
continue;
end
% 计算邻居节点的g值
tentativeG = currentNode.g + distance(currentNode.pos, neighbor.pos);
% 如果邻居节点不在open列表中,或者新的g值更小
if ~ismember(neighbor.pos, [openList.pos], 'rows') || tentativeG < neighbor.g
neighbor.g = tentativeG;
neighbor.h = distance(neighbor.pos, goal);
neighbor.f = neighbor.g + neighbor.h;
neighbor.parent = currentNode;
% 如果邻居节点不在open列表中,加入open列表
if ~ismember(neighbor.pos, [openList.pos], 'rows')
openList = [openList; neighbor];
end
end
end
end
% 如果没有找到路径,返回空
path = [];
end这段代码实现了A*算法的核心逻辑。通过不断评估节点的f值(即g值加上h值),算法能够找到从起点到目标点的最优路径。
最后,我们的小车还能走迷宫。迷宫的生成和求解是通过V-REP的API和MATLAB共同完成的。以下是迷宫生成的MATLAB代码:
matlab
function maze = generateMaze(width, height)
% 初始化迷宫
maze = zeros(width, height);
% 随机生成迷宫
for i = 1:width
for j = 1:height
if rand() > 0.7
maze(i, j) = 1; % 1表示墙
else
maze(i, j) = 0; % 0表示通路
end
end
end
end这段代码通过随机生成0和1来创建迷宫,其中1表示墙,0表示通路。虽然生成的迷宫可能不够复杂,但足以用来测试小车的走迷宫能力。
总的来说,这个V-REP小车项目涉及了多个方面的技术,从传感器数据处理到路径规划算法,每一步都充满了挑战和乐趣。如果你也对机器人仿真感兴趣,不妨试试这个项目,相信你会有不少收获。