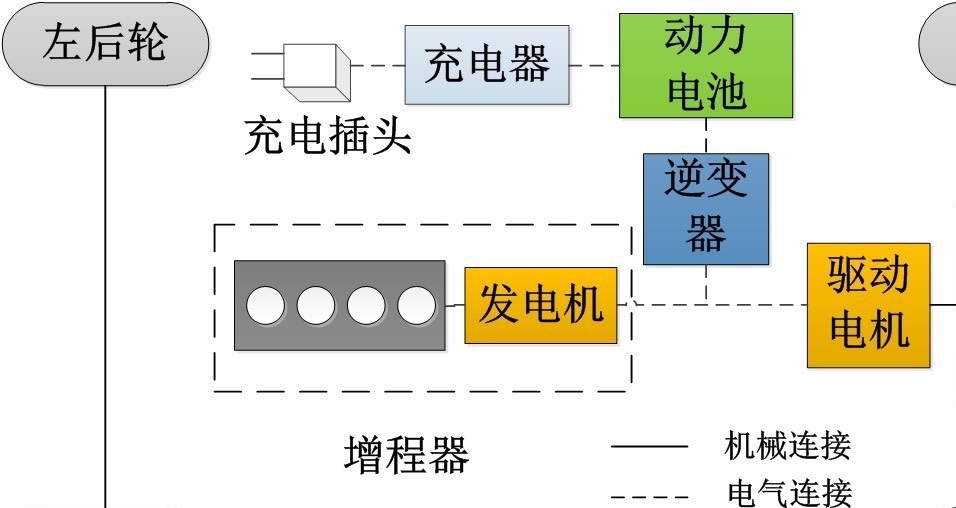
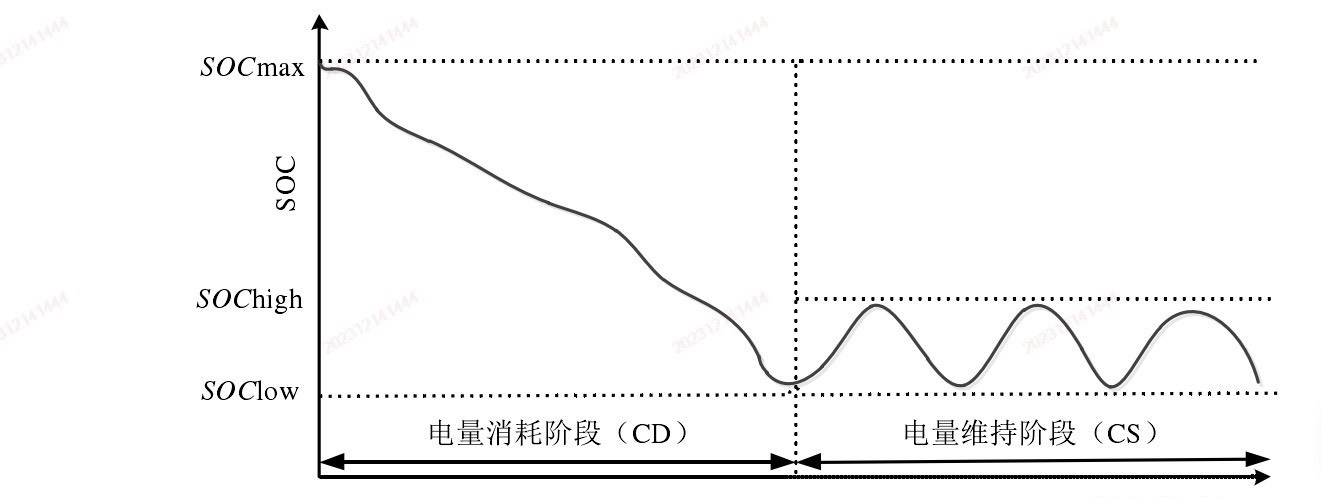
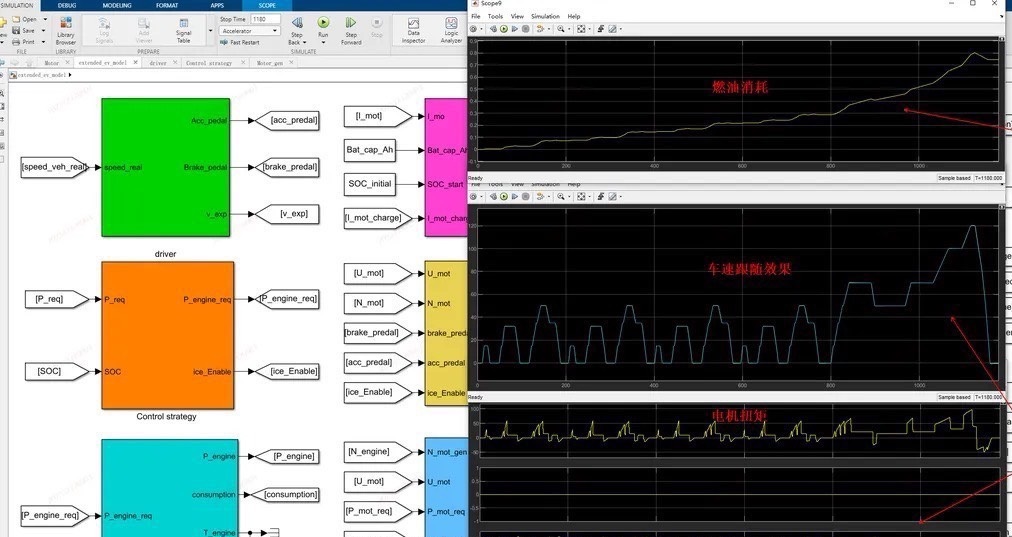
基于Matlab/simulink的增程式混合动力汽车建模仿真模型(增程纯电,与日产的e-power整车配置策略类似),包含增程器模型、电机模型、电池模型,驾驶员模型,整车VCU控制模型等 基于模型的整车策略开发思路、整车模型搭建流程。 模型明确清晰,相当于手把手教学,新能源混动控制建模方面相关需求人才强烈推荐,教你玩转基于simulink的混动汽车建模开发流程 ------此模型同为本人研究生开发模型(纯手工搭建)全网独一份,提供工况数据、仿真数据,发动机,电机等整车数据(到手可直接运行仿真,不能仿真不收费) ------仿真结果显示有发动机扭矩,电机扭矩,SOC变化曲线,车速跟随情况,电池电流、能量变化,累计燃油消耗量,行驶距离等都能看(整车能量管理策略详细直观) 纯电模式到增程模式切换,电量维持规则阈值参数设定。
今天咱们来拆解一套基于Simulink的增程式混动汽车仿真模型。这个模型就像乐高积木,把发动机、电机、电池这些部件"咔嗒"一拼接,再配上控制策略,就能看到车辆在虚拟世界里撒欢跑了。
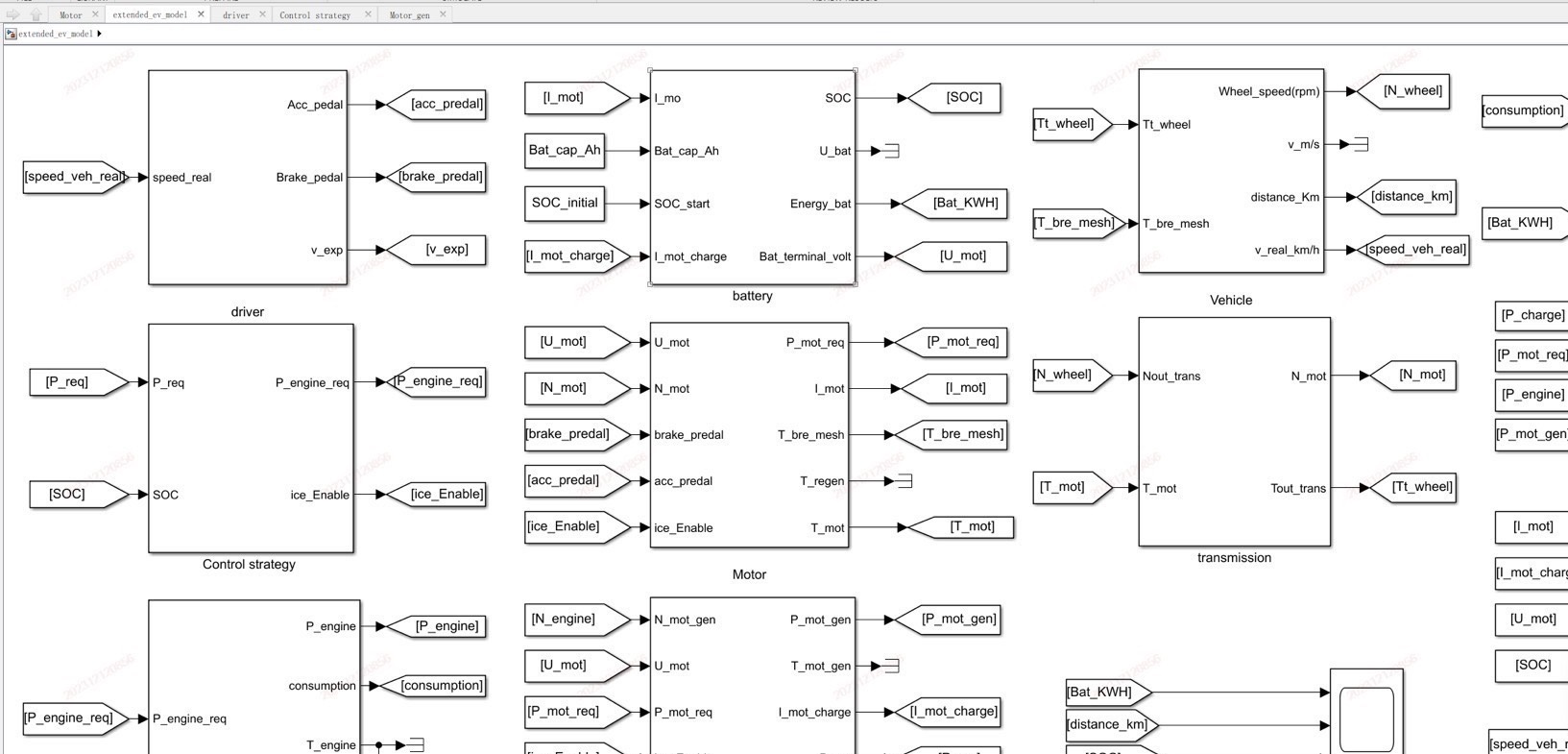
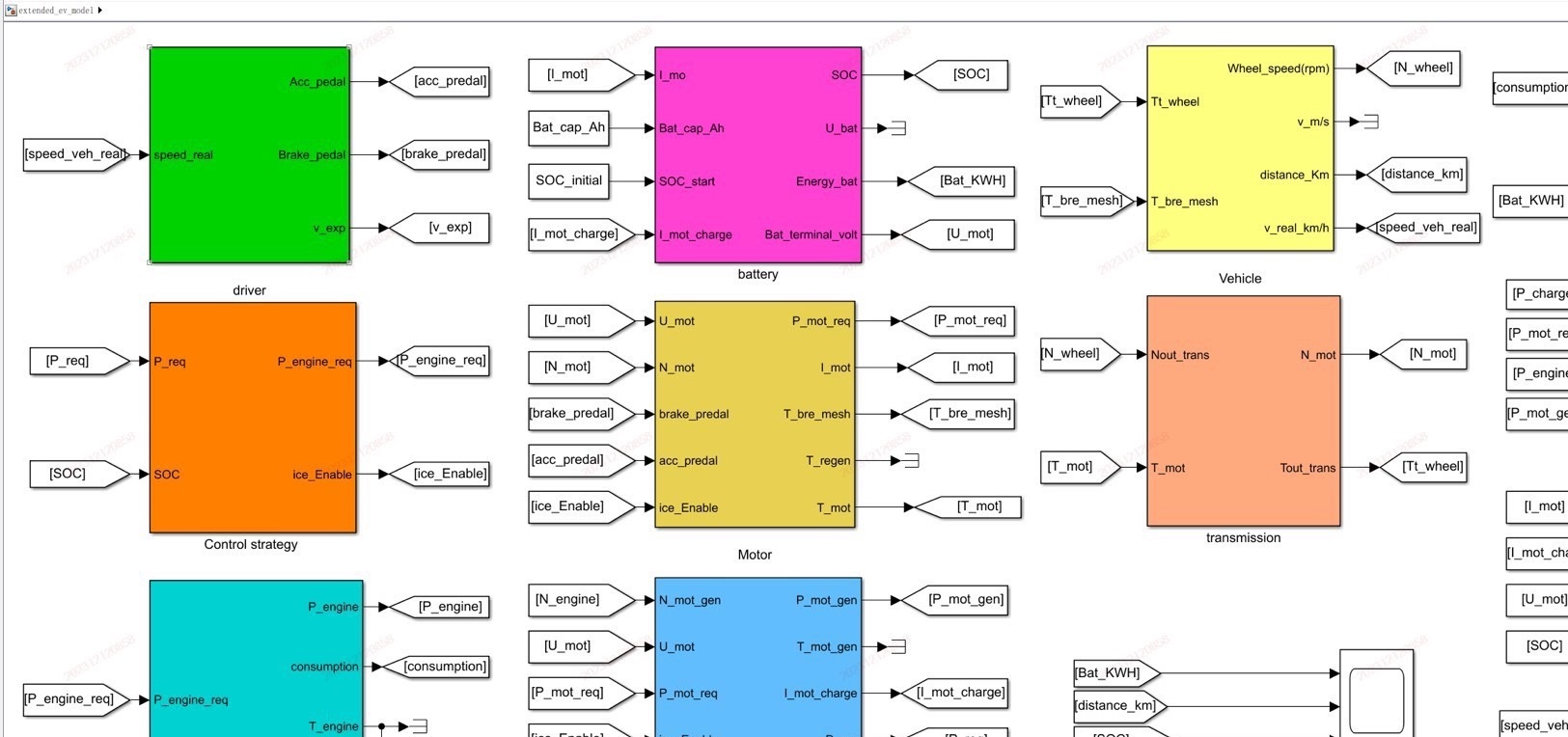
先看模型架构(随手打开Simulink界面截图):最左边是驾驶员油门开度输入,中间串着VCU控制模块,右边并联着电机驱动系统和增程器系统。这种架构很像现实车辆的总线布局,油门信号像神经冲动一样传导到各个执行器。
重点说说增程器的建模技巧。汽油机部分用查表法实现,转速-扭矩MAP图直接导入二维查表模块。这里有个坑要注意:查表模块的插值方法必须选linear,否则高转速区会出现诡异的扭矩波动。建议用代码预处理MAP数据:
matlab
engine_map = xlsread('engine_data.xlsx');
set_param('model/Engine_SpeedTorque','Table',mat2str(engine_map));电机模型更简单,直接上效率MAP图。不过要注意设置最大扭矩随转速下降的曲线,这里推荐用三次多项式拟合:
matlab
% 电机外特性拟合
rpm = [0 2000 4000 6000];
torque = [200 200 180 150];
p = polyfit(rpm,torque,3);
set_param('motor_model','Coefficients',num2str(p));电池模型用二阶RC等效电路时,容易遇到数值振荡。实测加入1e-3欧姆的虚拟串联电阻就能稳定仿真。SOC估算用安时积分法配合开路电压校正,这里分享个防呆设计------当电流传感器异常时自动切换电压估算法:
matlab
if abs(current_sensor) > 500 % 电流超量程保护
soc_est = voc_lut(voltage_meas);
else
soc_est = coulomb_count(current,dt);
end模式切换策略才是灵魂所在。用Stateflow搭建的状态机,纯电切增程的阈值建议设置0.3SOC+2秒延时,防止颠簸路段误触发。看这段切换逻辑代码:
matlab
if (SOC < 0.3) && (vehicle_speed > 20)
enable_ICE = 1;
set_param('model/ICE','Commented','off');
elseif (SOC > 0.5) || (vehicle_speed < 5)
enable_ICE = 0;
end仿真结果绝对让你眼前一亮(贴出Scope截图)。车速跟随误差控制在±2km/h以内,SOC像坐滑梯一样从0.9降到0.3时发动机准时点火。燃油消耗曲线在NEDC工况下呈现脉冲式上升,完美复现真实车辆的"间歇充电"特性。
模型调试有玄学?这几个参数调优优先级记好:①发动机起停延迟时间 ②电机扭矩滤波常数 ③SOC滞环区间宽度。改参数时建议用批处理脚本:
matlab
for delay_time = 0.5:0.1:1.5
set_param('model/Control','DelayTime',num2str(delay_time));
sim('model');
plot(soc_data);hold on;
end模型文件里还藏着彩蛋------自定义驾驶工况生成器。用randperm函数随机生成加减速序列,比标准工况更能考验控制策略的鲁棒性。试试这个变态工况:
matlab
t = 0:0.1:600;
speed_profile = 10+8*square(t/20)+5*randn(size(t)); 玩转这套模型后,保证你对混动系统的理解能上两个台阶。模型文件已打包好,包含七大测试工况和二十组标定参数。遇到仿真报错别慌,检查是不是没把"ICE_Controller"子模块取消注释------这个我故意留的坑,就看你够不够细心了。