文章目录
- [一、Livox Viewer 查看点云](#一、Livox Viewer 查看点云)
- [二、 ROS 查看点云](#二、 ROS 查看点云)
-
- [1. 安装 雷达驱动 Livox-SDK2](#1. 安装 雷达驱动 Livox-SDK2)
- [2. 使用 ROS 功能包查看点云](#2. 使用 ROS 功能包查看点云)
- [3. 精简 livox_ros_driver2 功能包(可选)](#3. 精简 livox_ros_driver2 功能包(可选))
自己整理的相关资料内容 下载链接,按需取用。
一、Livox Viewer 查看点云
Mid-360 是 4 线束非重复扫描固态激光雷达。Mid-360内部集成了IMU芯片(3轴加速度计和3轴陀螺仪),默认情况下,上电后即开始以200Hz频率推送IMU数据(可通过上位机开启或关闭)。数据内容包括3轴加速度以及3轴角速度,方向与点云坐标系相同,在点云坐标系下IMU芯片的位置为(x=11.0mm,y=23.29 mm, z=-44.12 mm)
Mid-360通过以太网进行数据通信(UDP),支持静态IP地址模式。所有Mid-360出厂默认IP地址为192.168.1.1XX(XX为Mid-360 SN码最后两位数字),子网掩码为255.255.255.0,默认网关为192.168.1.1。首次使用Mid-360时,无需通过路由器,即可直接与电脑连接。
- IP地址(192.168.1.1XX):是设备在网络中的唯一标识符,用于区分网络中的其他设备。
- 子网掩码(255.255.255.0):子网掩码用于确定网络部分和主机部分。255.255.255.0表示前24位是网络部分,后8位是主机部分。在这种配置下,网络中可以有256个地址(0-255),其中254个可用地址(去掉网络地址和广播地址)。
- 网关(192.168.1.1):网关是连接不同网络的设备,通常是路由器。设备通过这个地址与外部网络进行通信。在 Mid-360 的使用中可以不用设置。
- DNS(域名系统):是互联网中的一个重要服务,用于将域名(如www.example.com)转换为IP地址(如192.168.1.1),使设备能够通过友好的名称访问网站和其他网络资源。
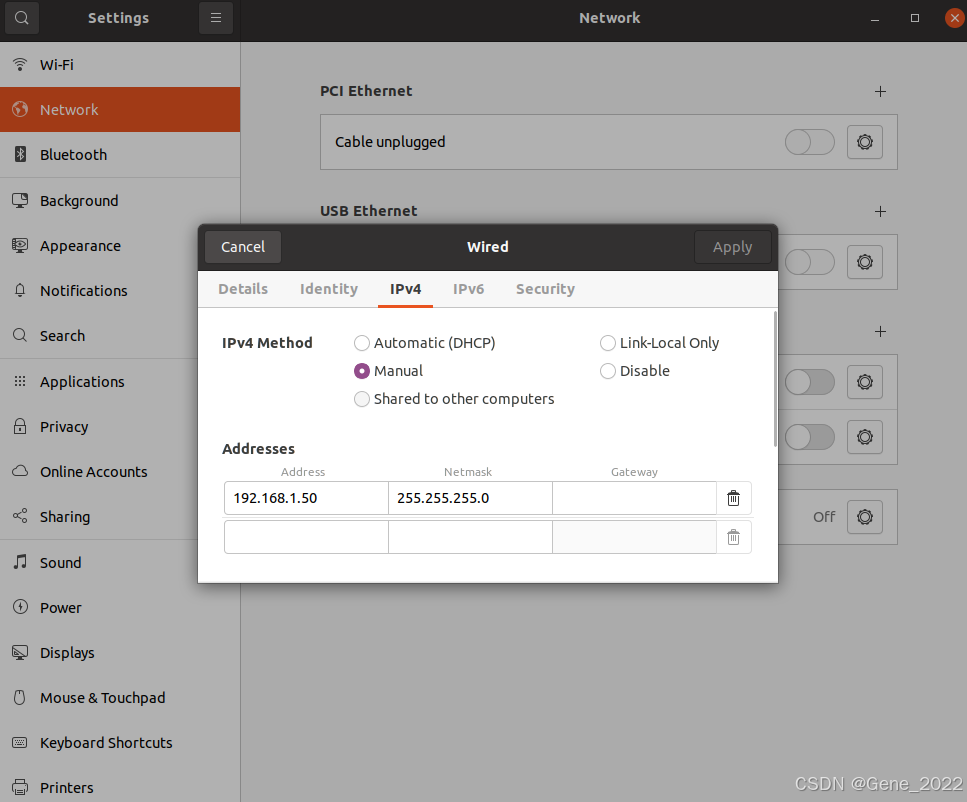
此时,为保证自己的电脑与mid360在同一网段,配置自己ubuntu电脑有线网络 IPv4的IP地址为192.168.1.50,网关为255.255.255.0。
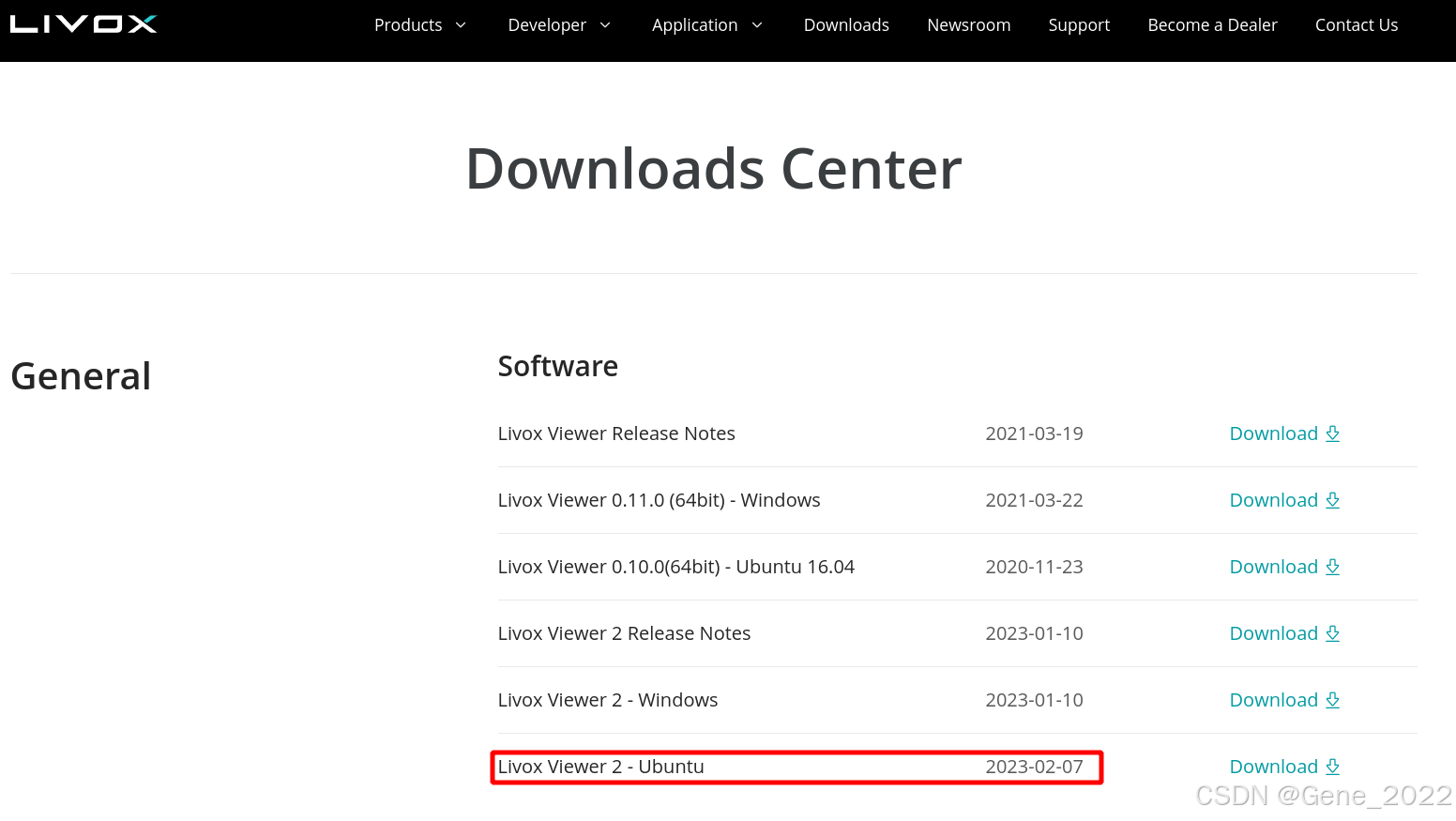
接着,从 livox 官网 下载 Livox Viewer 2 - Ubuntu。
bash
unzip LivoxViewer2 for Ubuntu v2.3.0.zip
cd LivoxViewer2 for Ubuntu v2.3.0
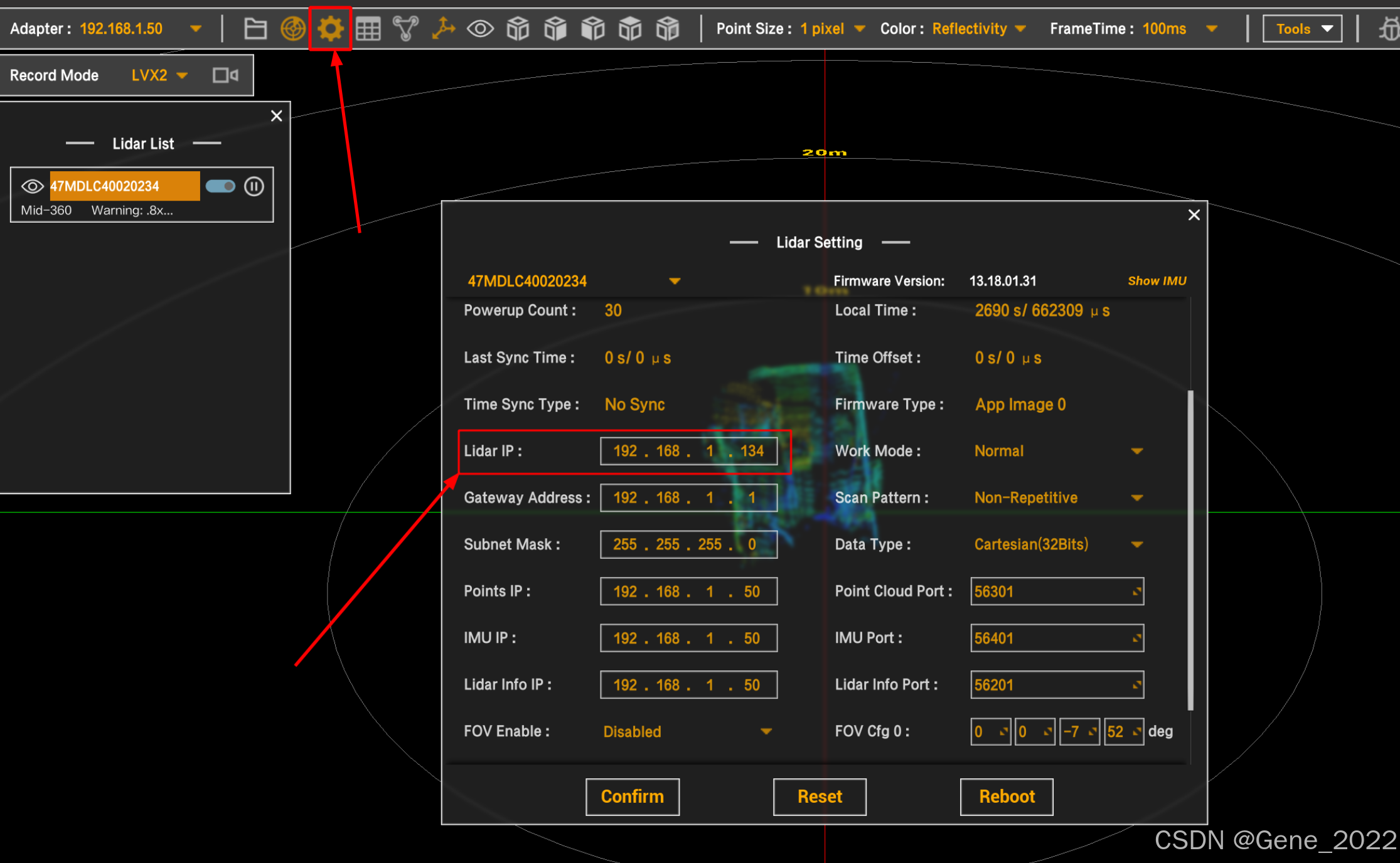
.LivoxViewer2.sh执行完上述脚本,会弹出官方上位机界面进行点云数据查看。从下图可以看到,雷达IP 为192.168.1.134,与其SN 后两位相对应。

livox_viewer.desktop 内容参考如下:
bash[Desktop Entry] Version=1.0 Name=LivoxViewer2 Comment=LivoxViewer2 Exec=/home/gene/Documents/software/LivoxViewer2_for_Ubuntu_v2.3.0/LivoxViewer2.sh Icon=/home/gene/Documents/software/LivoxViewer2_for_Ubuntu_v2.3.0/livox_viewer.jpg StartupNotify=true Terminal=false Type=Application Categories=Applications;
二、 ROS 查看点云
1. 安装 雷达驱动 Livox-SDK2
在 Livox-SDK2 下载官方驱动及安装。
bash
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
mkdir build
cd build
cmake .. && make -j$(nproc)
sudo make install生成的共享库和静态库安装到"/usr/local/lib"目录下。头文件安装到"/usr/local/include"目录中。
如果想要删除 Livox SDK2:
bash
sudo rm -rf /usr/local/lib/liblivox_lidar_sdk_*
sudo rm -rf /usr/local/include/livox_lidar_*2. 使用 ROS 功能包查看点云
在 livox_ros_driver2 下载功能包。
bash
mkdir -p livox_ws/src && cd livox_ws/src
git clone https://github.com/Livox-SDK/livox_ros_driver2.git ws_livox/src/livox_ros_driver2
# ROS1 + ubuntu20.04
source /opt/ros/noetic/setup.sh
./build.sh ROS1
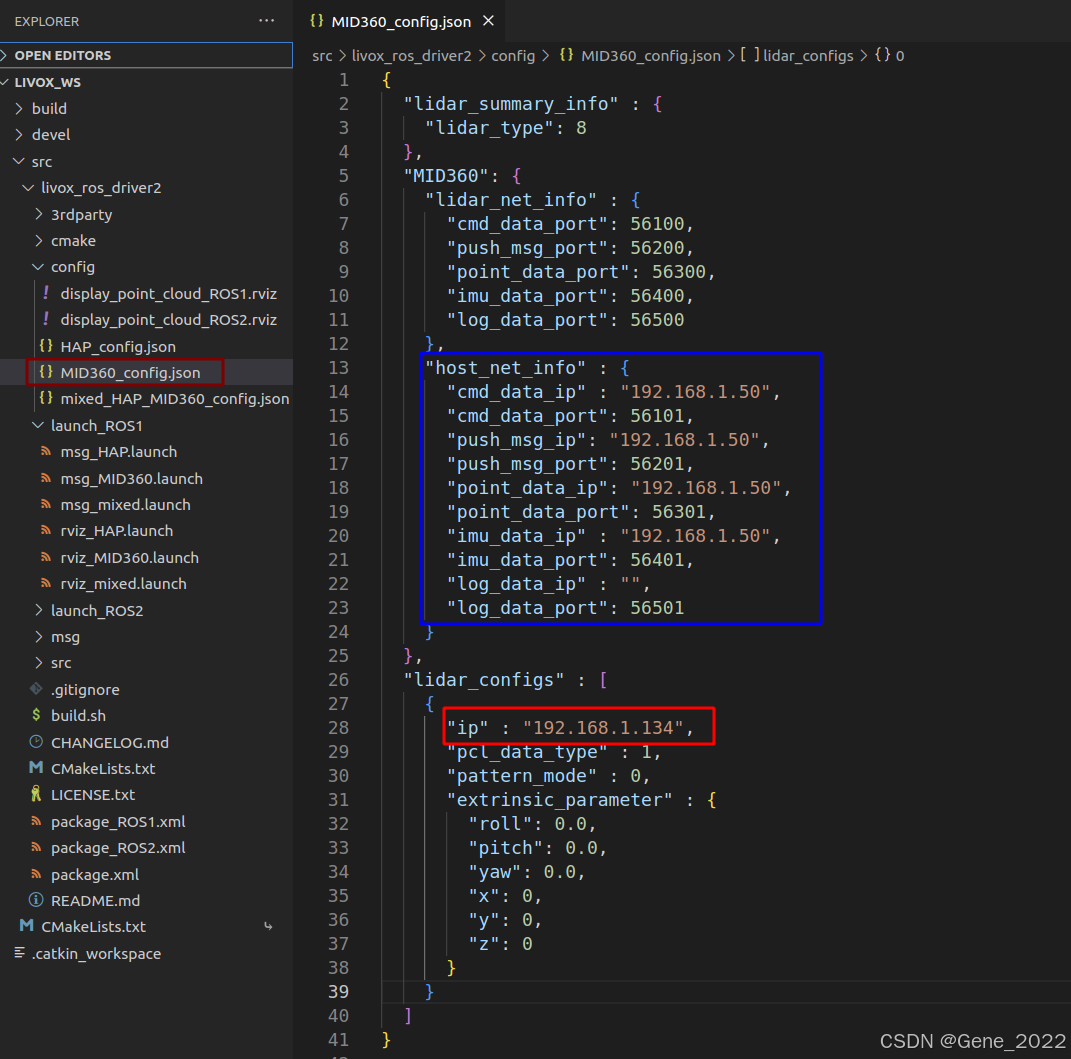
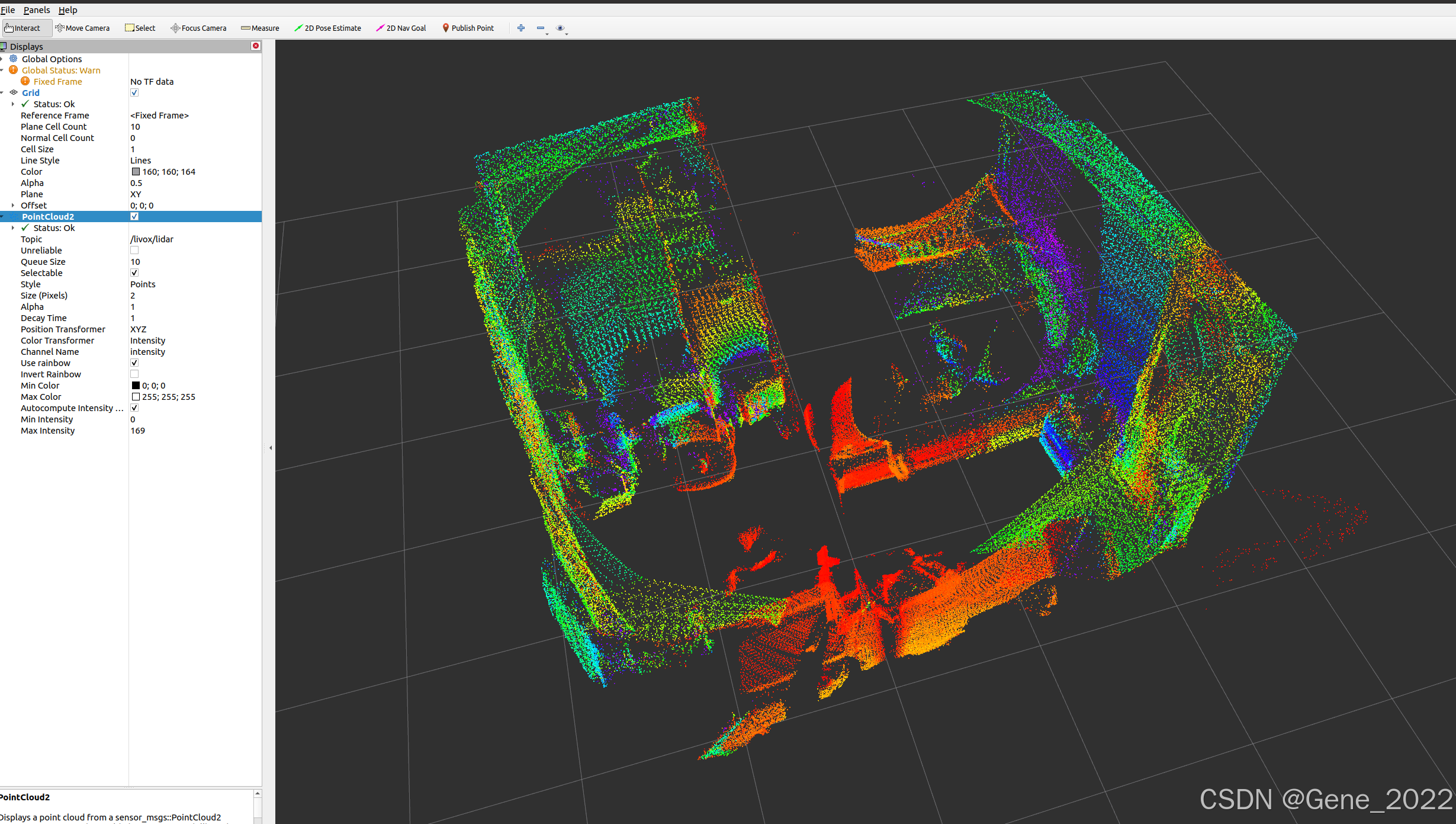
roslaunch livox_ros_driver2 rviz_MID360.launch在启动launch前,需要注意的是:根据实际情况配置 /livox_ros_driver2/config/MID360_config.json 文件。
- 红框为自己的雷达机器IP ------ 默认IP地址为192.168.1.1XX(XX为Mid-360 SN码最后两位数字);
- 蓝框为自己设置电脑的有线IPv4地址
192.168.1.50。
然后就可以愉快的通过ros进行mid360快乐玩耍了~
3. 精简 livox_ros_driver2 功能包(可选)
livox_ros_driver2 是官方为了兼容ROS1和ROS2的通用版本,需要通过./build.sh ROS*来指定编译。而自己的系统是确定的ROS版本,可以根据需要精简 livox_ros_driver2 功能包。如下是 build.sh 文件内容,可以看到是 首先清除原本编译的编译文件,接着根据指定版本对launch、xml文件进行重复盖,然后使用对应ROS版本重新编译 。所以我们根据红蓝框对相应的文件进行重命名删减,即可得到指定的版本(其实,++首次执行/build.sh ROS* 后,该功能包即是对应版本功能包++)。
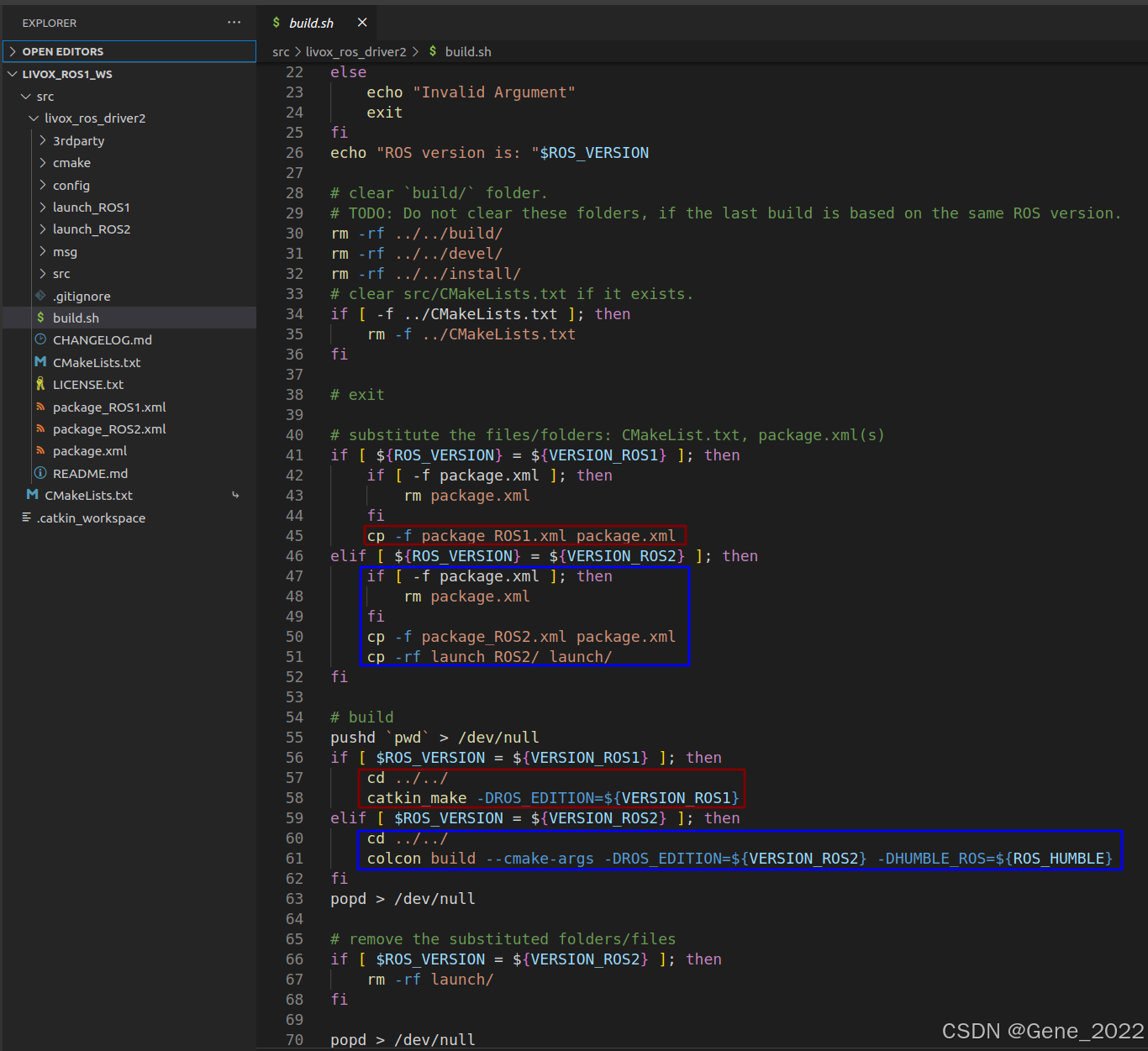
关于CMakeLists.txt 文件,我们也可以根据变量ROS_EDITION 进行精简。

自己整理了 livox 关于ubuntu的上位机、驱动及ROS功能包相关资源 按需选用,也方便自己后续新环境配置驱动,共整理四个文件夹,其作用分别如下:
| 版本 | 作用 |
|---|---|
| LivoxViewer2_for_Ubuntu_v2.3.0 | 官方上位机 |
| Livox-SDK2 | 雷达驱动 |
| livox_general_ws | 兼容ROS1、ROS2版本 |
| livox_ros1_ws | ROS1版本 |
| livox_ros2_ws | ROS2版本 |
重点是解决自己 ROS2 因
LIVOX_INTERFACES_INCLUDE_DIRECTORIES编译报错的问题。
操作方法如下:
bash
# ---------------- livox_general_ws ---------------------------
cd livox_general_ws/src/livox_ros_driver2
./build.sh ROS1 # 或 ./build.sh ROS2
# ---------------- livox_ros1_ws ---------------------------
cd livox_ros1_ws
catkin_make
# ---------------- livox_ros2_ws ---------------------------
cd livox_ros2_ws
colcon build无语,,,自己设的免费积分资源,被平台设为 VIP资源下载了。。。