FAST-Calib 激光雷达与相机联合标定实战教程 (Docker版)
1. 前言与致谢
致谢 :本教程核心算法源自开源项目 FAST-Calib (GitHub: hku-mars/FAST-Calib),在此对原作者表示诚挚的感谢。
背景说明 :
本教程旨在解决 Ubuntu 22.04 等高版本系统无法直接安装 ROS Noetic (ROS1) 从而难以运行 FAST-Calib 的问题。通过 Docker 容器化部署,我们可以在任意支持 Docker 的系统上快速复现标定环境。
如果你使用的是 Ubuntu 20.04 ,系统原生支持 ROS Noetic,也可以直接参考我的测试分支进行安装:https://github.com/engine1wu/FAST-Calib/tree/test
bash
git clone -b test https://github.com/engine1wu/FAST-Calib.git项目增强 :
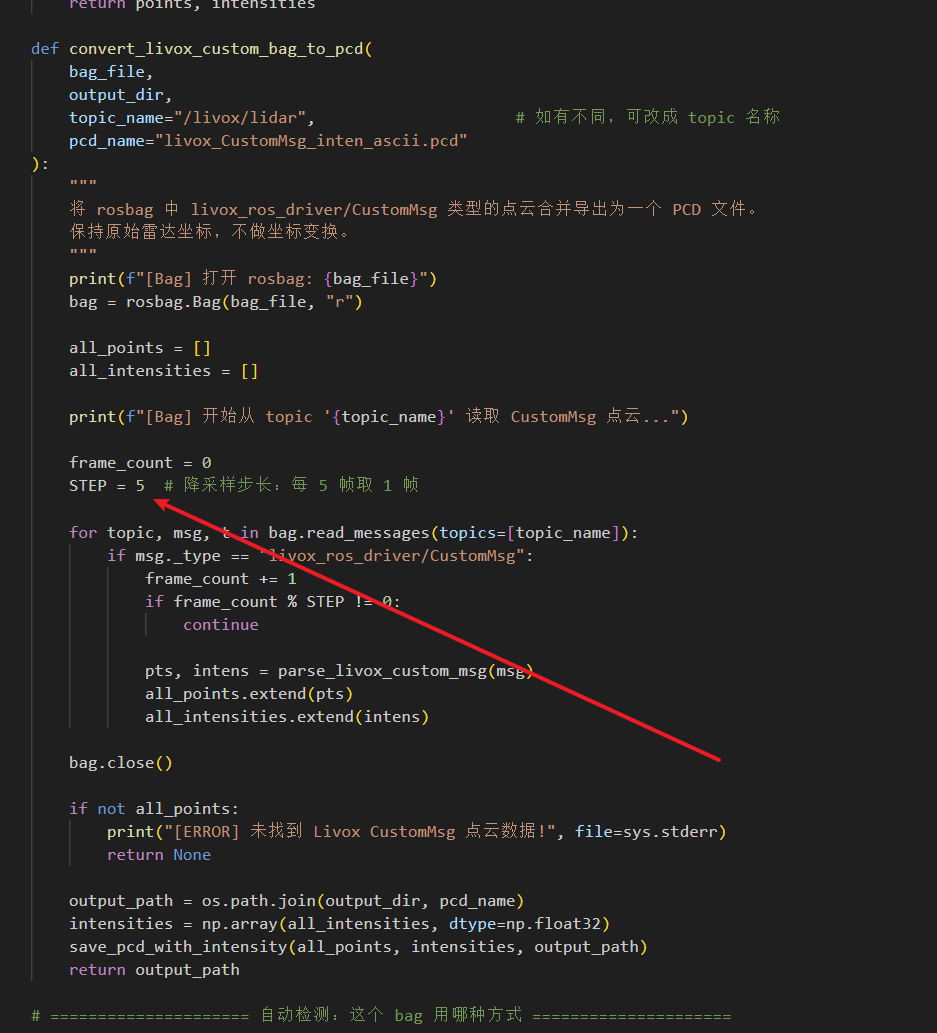
为了提升标定效率,我在原项目基础上添加了辅助脚本(位于 scripts 目录),主要用于:
- 点云距离过滤:交互式提取标定板周围点云范围。
- 图像提取:从 Rosbag 中提取清晰的标定图像。
所有相关代码和脚本均已打包在下文提供的 Docker 项目包中。
2. 准备工作
依赖安装
点云距离过滤脚本依赖 Open3D 库,请在宿主机(你的电脑)上安装:
bash
pip3 install open3d数据录制 (Rosbag)
注意:只有确保雷达和相机的采样时间同步,标定才有效。
在进行标定前,需要录制包含传感器数据的 rosbag。请确保标定过程中保持传感器和标定板完全静止。
录制要求
- 必须包含的话题 :
- LiDAR 点云 :
sensor_msgs/PointCloud2或livox_ros_driver/CustomMsg(例如/livox/lidar,/hesai/pandar) - 相机图像 :
sensor_msgs/Image或sensor_msgs/CompressedImage(例如/camera/image_color,/usb_cam/image_raw)
- LiDAR 点云 :
- 时长:录制 5-10 秒即可。
录制命令示例
bash
# 请修改为实际的话题名称
rosbag record /livox/lidar /camera/image_color -O my_calib.bag3. FAST-Calib 项目部署 (Docker环境)
1. 环境准备
确保已安装 docker 和 docker compose。

(注:Docker 版本不强制,但建议 Docker Compose 保持较新版本)
2. 下载项目包
请下载整合了 Docker 镜像与源代码的压缩包 fast_calib.tar.gz:
百度网盘下载
链接 : https://pan.baidu.com/s/1Lur-kqS7RM2uyHjDfQ3uZw
提取码 :
adwm
下载完成后,在终端解压:
bash
# 解压
tar -zxf fast_calib.tar.gz
进入项目主目录,目录结构如下:
bash
.
├── docker-compose-ready.yml # Docker Compose 配置文件
├── FAST-Calib # 项目源代码 (含辅助脚本)
├── fast-calib-docker-image.tar.gz # Docker 镜像离线包
└── import-docker-image.sh # 镜像导入脚本3. 导入 Docker 镜像
执行一键导入脚本:
bash
# 添加执行权限
chmod +x import-docker-image.sh
# 运行导入脚本
./import-docker-image.sh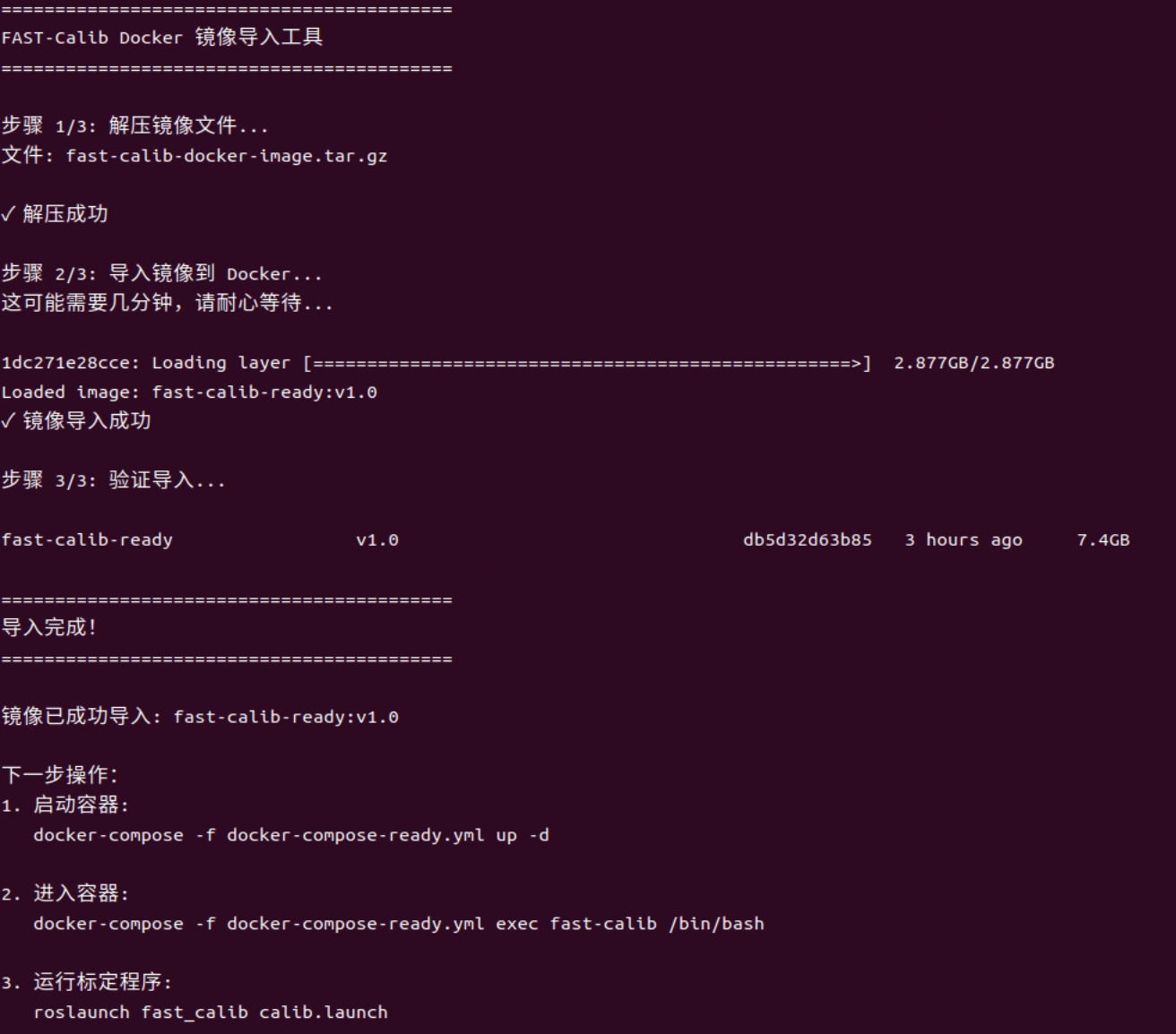
导入成功后,执行 docker images 应能看到相关镜像。

4. 启动容器
首先,将录制好的 .bag 文件放入项目的数据目录中,以便容器读取:
bash
# 假设当前在 fast_calib 目录
cd FAST-Calib/calib_data/ && mkdir -p data
cd data
# 将你的 bag 文件移动到这里
mv /path/to/your/bag/my_calib.bag ./
(注:本地 FAST-Calib 目录会挂载到容器内部,实现文件同步)
启动容器:
bash
# 回到项目主目录 fast_calib
cd ../../../
docker-compose -f docker-compose-ready.yml up -d
# 查看运行状态
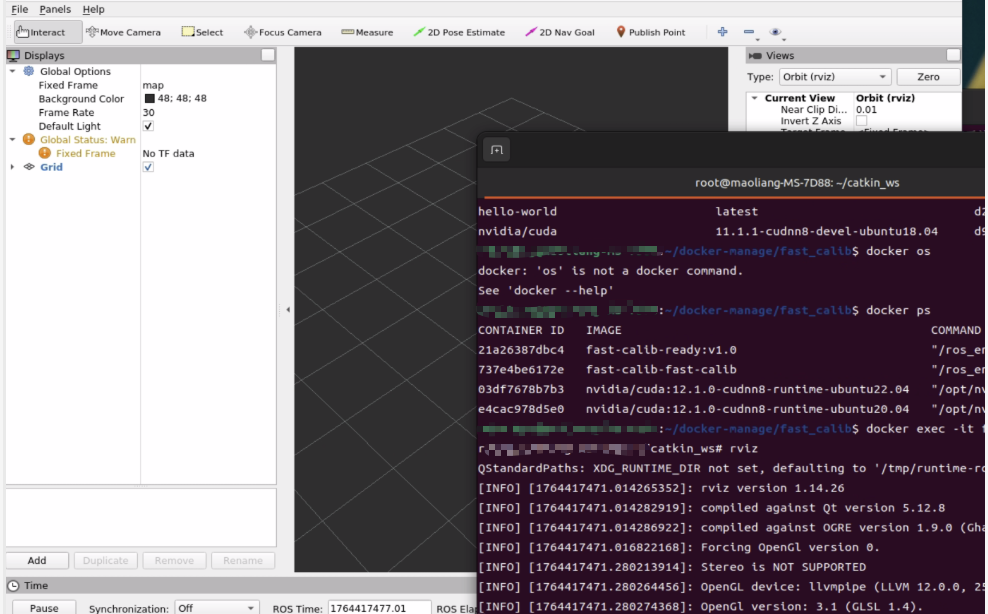
docker ps
5. 配置图形界面转发与进入容器
为了显示 RViz 界面,需要允许 Docker 使用本地显示服务:
在宿主机终端执行:
bash
xhost +local:docker
进入容器终端:
bash
docker exec -it fast-calib-ready /bin/bash
关于 docker exec 的简要说明:
- 此命令在运行中的容器内启动一个新的 bash 会话。
-it参数让你能够与容器终端进行交互。- 此时你的终端环境已切换到容器内部,操作均在容器中进行。
- 输入
exit可退出容器终端(容器本身仍会在后台运行)。
测试图形界面 :
在容器终端内输入 rviz,如果能弹出 RViz 窗口,说明环境配置成功。
4. 参数配置与标定流程
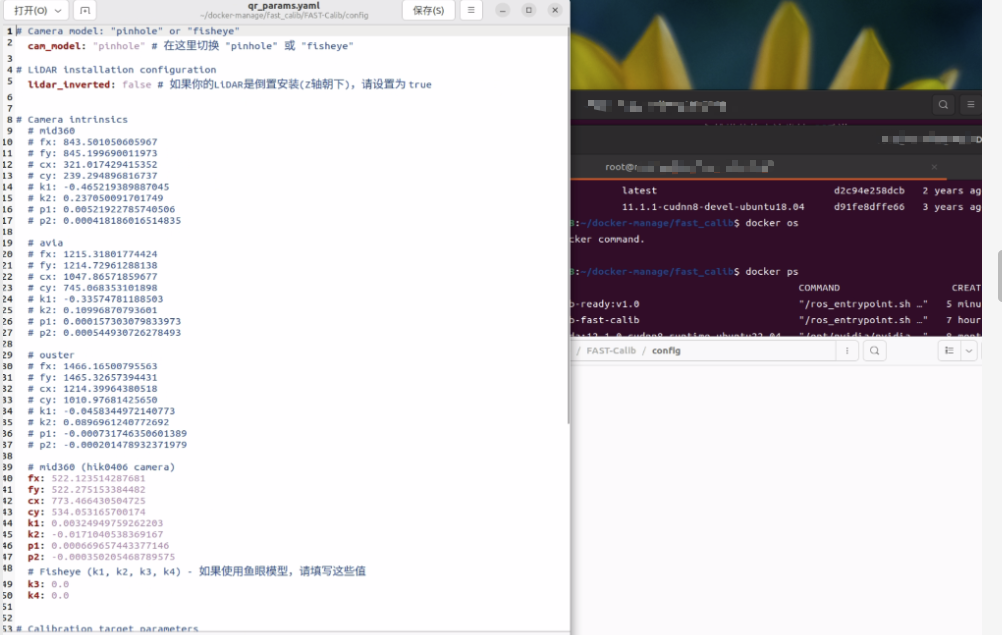
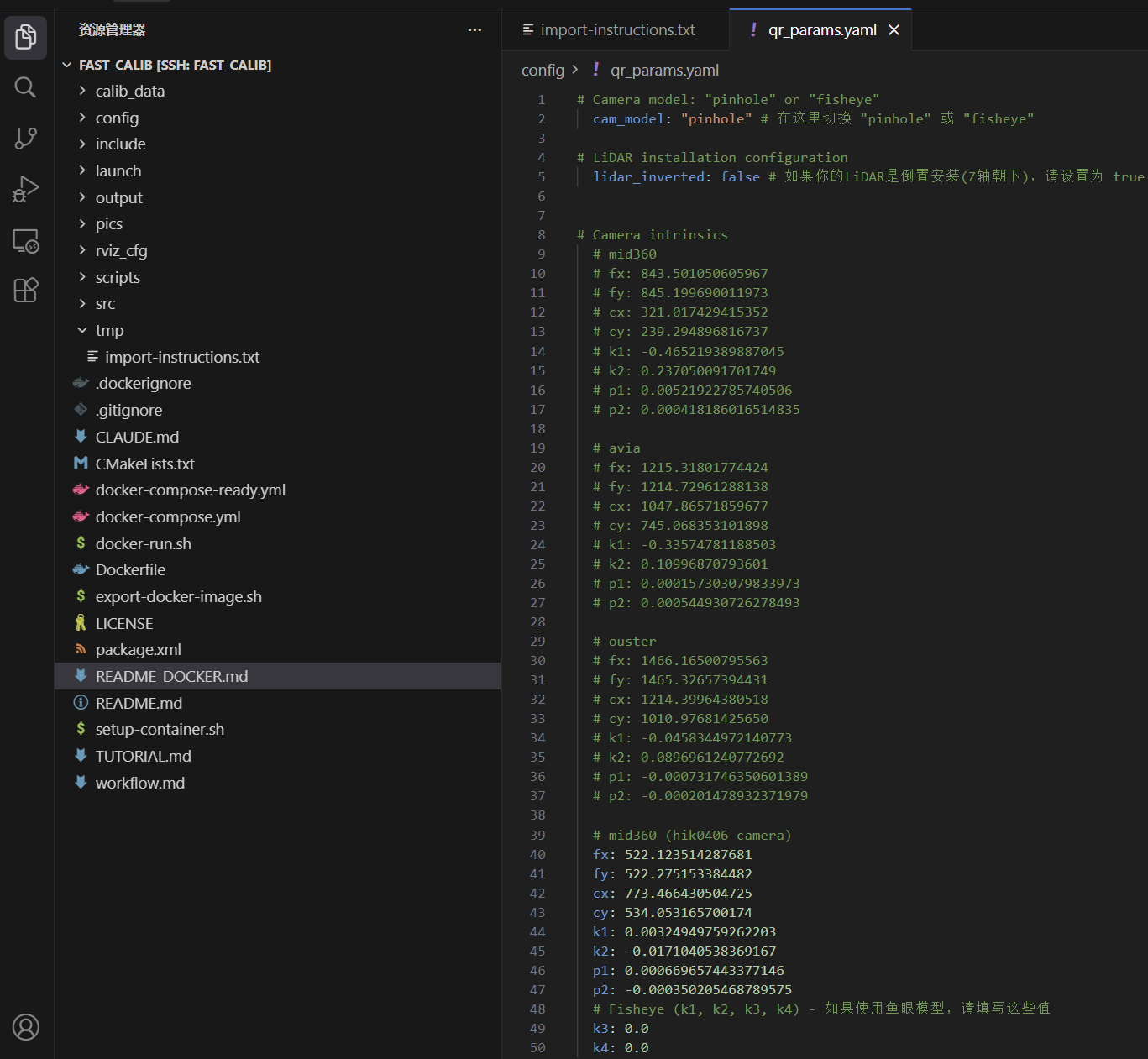
所有的配置均在 config/qr_params.yaml 文件中进行。你需要根据实际硬件和场景修改以下参数。
注:建议直接在宿主机使用编辑器(如 VS Code)打开 FAST-Calib/config/qr_params.yaml 进行修改,保存后容器内会自动生效。
A. 相机模型与内参 (Camera Intrinsics)
填写相机的标定参数。若未标定,请先使用 camera_calibration 等工具获取。
cam_model: 相机模型,通常为"pinhole"(针孔) 或"fisheye"(鱼眼)。fx,fy: 焦距 (像素单位)。cx,cy: 主点坐标 (图像中心)。k1,k2,p1,p2: 畸变系数。
B. 标定板参数 (Calibration Target)
根据标定板的实际物理尺寸填写,单位为 米 (m)。
marker_size: 二维码边长。circle_radius: 圆形特征半径。delta_width/height...: 标记间的距离。
(注:如果使用配套的标准标定板,通常无需修改此部分)
C. 点云距离过滤 (Distance Filter) ------ 关键步骤
我们需要设置一个包围盒(Bounding Box),只保留标定板周围的点云,过滤掉背景干扰。
使用辅助脚本 :scripts/distance_filter_tool.py
-
运行脚本(自动读取 bag 中的点云):
bash# 在容器内部终端执行 cd /root/catkin_ws/src/fast_calib # 语法:python3 scripts/distance_filter_tool.py [bag相对路径] python3 scripts/distance_filter_tool.py calib_data/data/my_calib.bag(脚本会自动检测点云话题,无需指定)

-
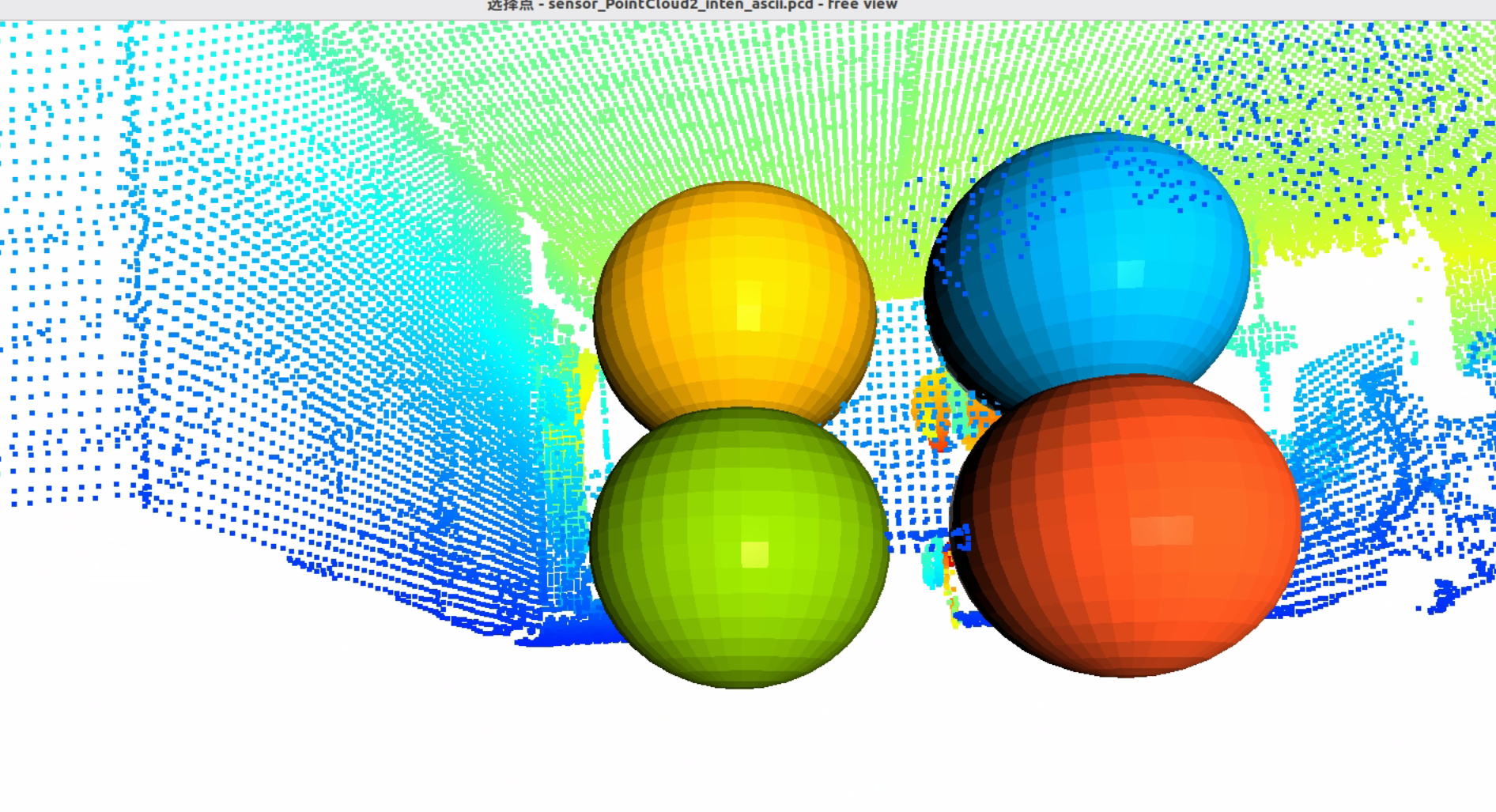
交互选点 (Open3D 界面):
- 操作 :按住 Shift + 鼠标左键 点击点云。
- 目标 :在标定板的 上、下、左、右 空间各点击一下(至少4个点),形成一个包围标定板的区域。
- 调整视角 :鼠标左键旋转,滚轮平移/缩放。如果点云太密导致卡顿,可按
-键减少点数。 - 完成 :选好点后,按 Q 键退出。
-
获取参数 :
脚本会在 bag 同目录下生成
.txt文件。打开它,复制x_min,x_max等 6 个值。

-
填入配置 :
将这 6 个值填入
config/qr_params.yaml的 Distance filter 部分。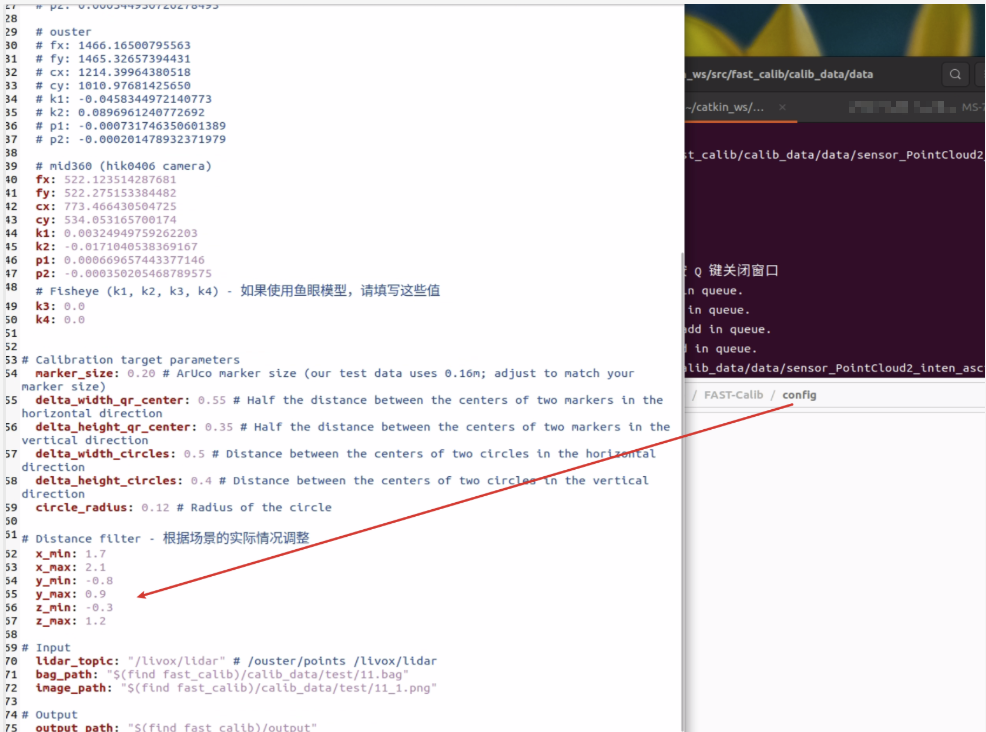
D. 提取静态标定图像
程序需要一张清晰的静态图片用于角点检测。
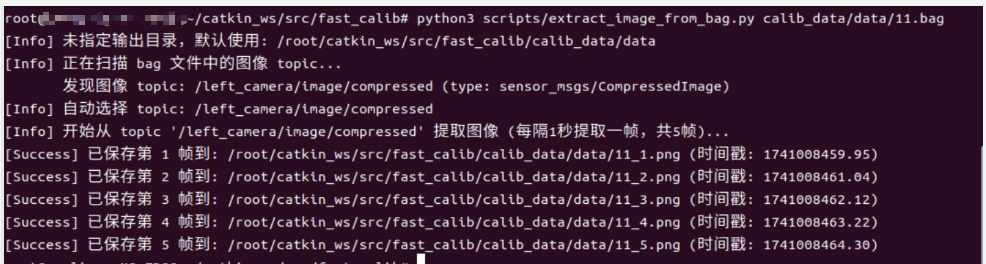
使用辅助脚本 :scripts/extract_image_from_bag.py
-
运行脚本:
bash# 在容器内部终端执行 python3 scripts/extract_image_from_bag.py calib_data/data/my_calib.bag脚本会默认提取前几秒的图像,保存在 bag 同目录下。
-
选择与配置 :
挑选一张清晰、无运动模糊、标定板完整 的图片(如
my_calib_1.png)。在
config/qr_params.yaml中修改image_path:yamlimage_path: "$(find fast_calib)/calib_data/data/my_calib_1.png"
E. 确认输入路径
最后检查 config/qr_params.yaml 底部配置:
lidar_topic: 你的雷达话题名 (如/livox/lidar)。bag_path: 你的.bag文件路径。image_path: 你选择的.png图片路径。
5. 运行标定
1. 编译代码
bash
# 在容器内部执行
cd /root/catkin_ws/
catkin_make2. 启动程序
bash
source ~/.bashrc
roslaunch fast_calib calib.launch3. 查看结果
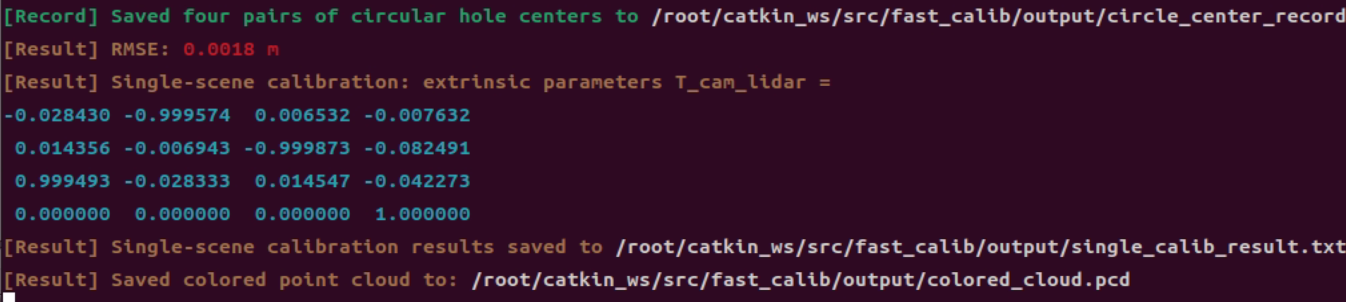
程序启动后会自动打开 RViz。你应该能看到:
- 白色点云:原始雷达数据。
- 绿色/红色平面:算法检测到的标定板位置。
- 终端输出:实时检测进度和 RMSE 误差值。
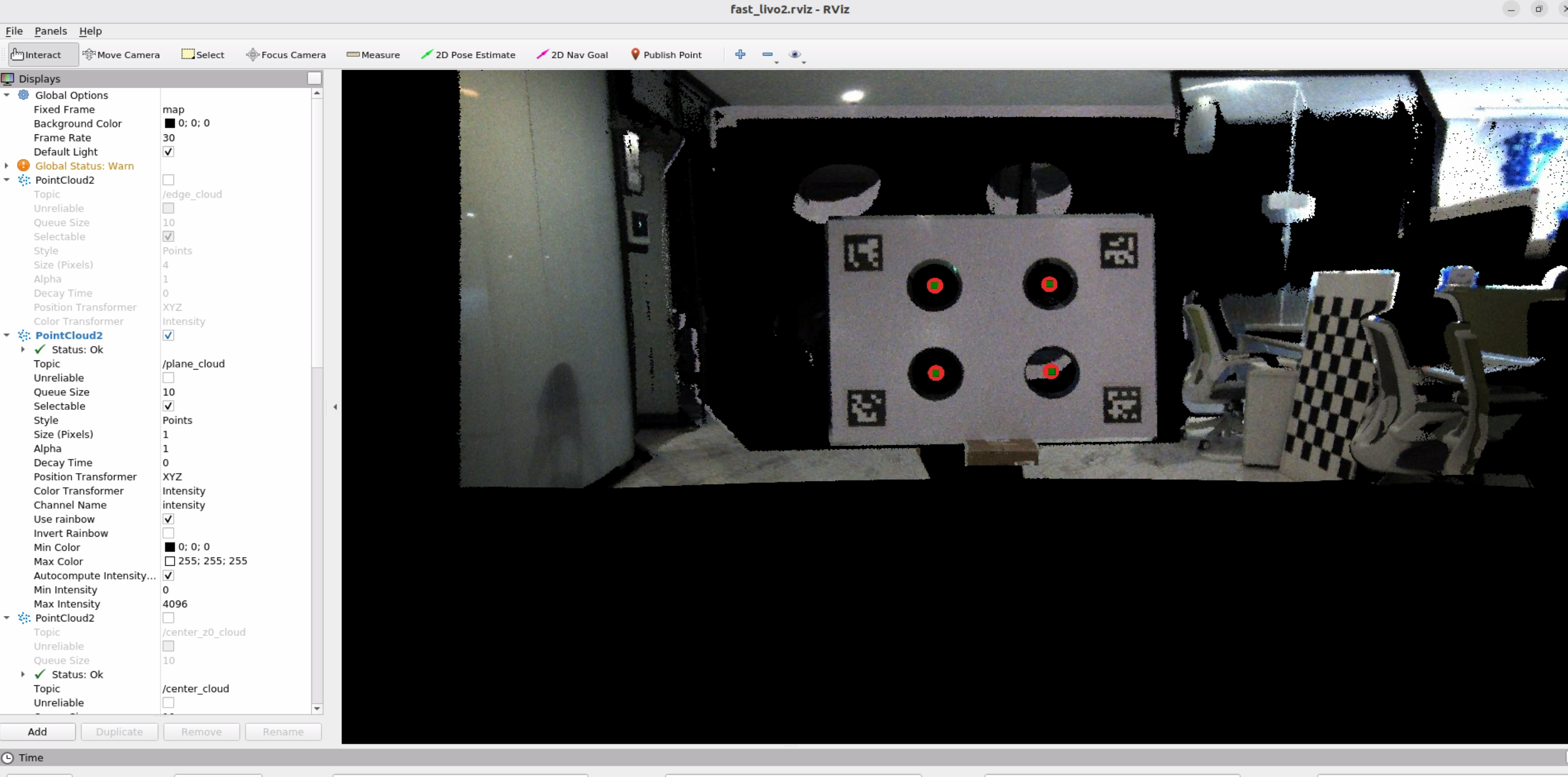
关于 RMSE (均方根误差):
- 含义:雷达特征点投影到相机图像后的平均距离误差。
- 评价标准 :
- < 1 cm (0.01m): 极好,精度极高。
- 1-3 cm: 一般,可用。
- > 3 cm: 较差,建议重做标定或检查内参。
- 图中 0.0018m (1.8mm) 表示标定结果非常精确。
6. 结果验证与输出
标定结果默认保存在 output/ 目录。
输出文件说明
single_calib_result.txt: 最终结果 。- 包含旋转矩阵 (Extrinsic R) 和平移向量 (Extrinsic t)。
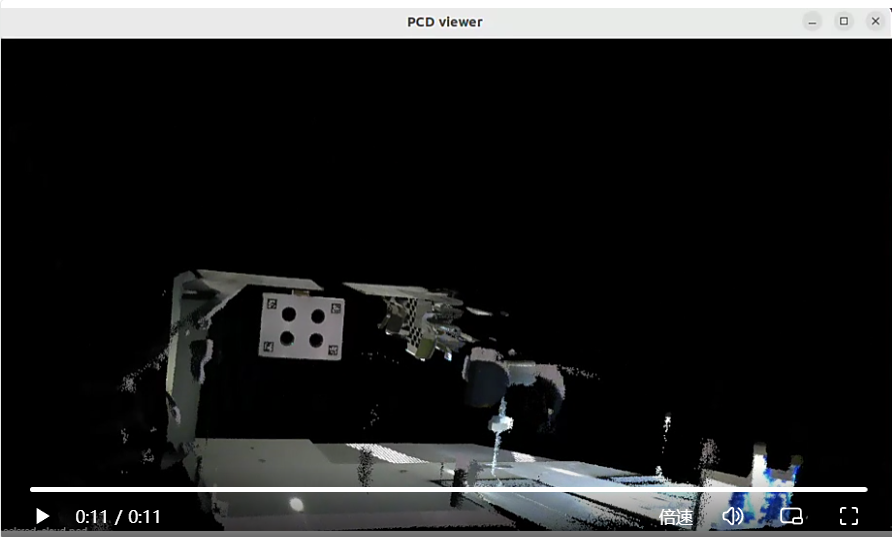
colored_cloud.pcd: 彩色点云 。- 将图像颜色投射到雷达点云上。这是验证标定效果最直观的方式。
qr_detect.png: 标定板检测图。- 检查角点是否被准确提取。
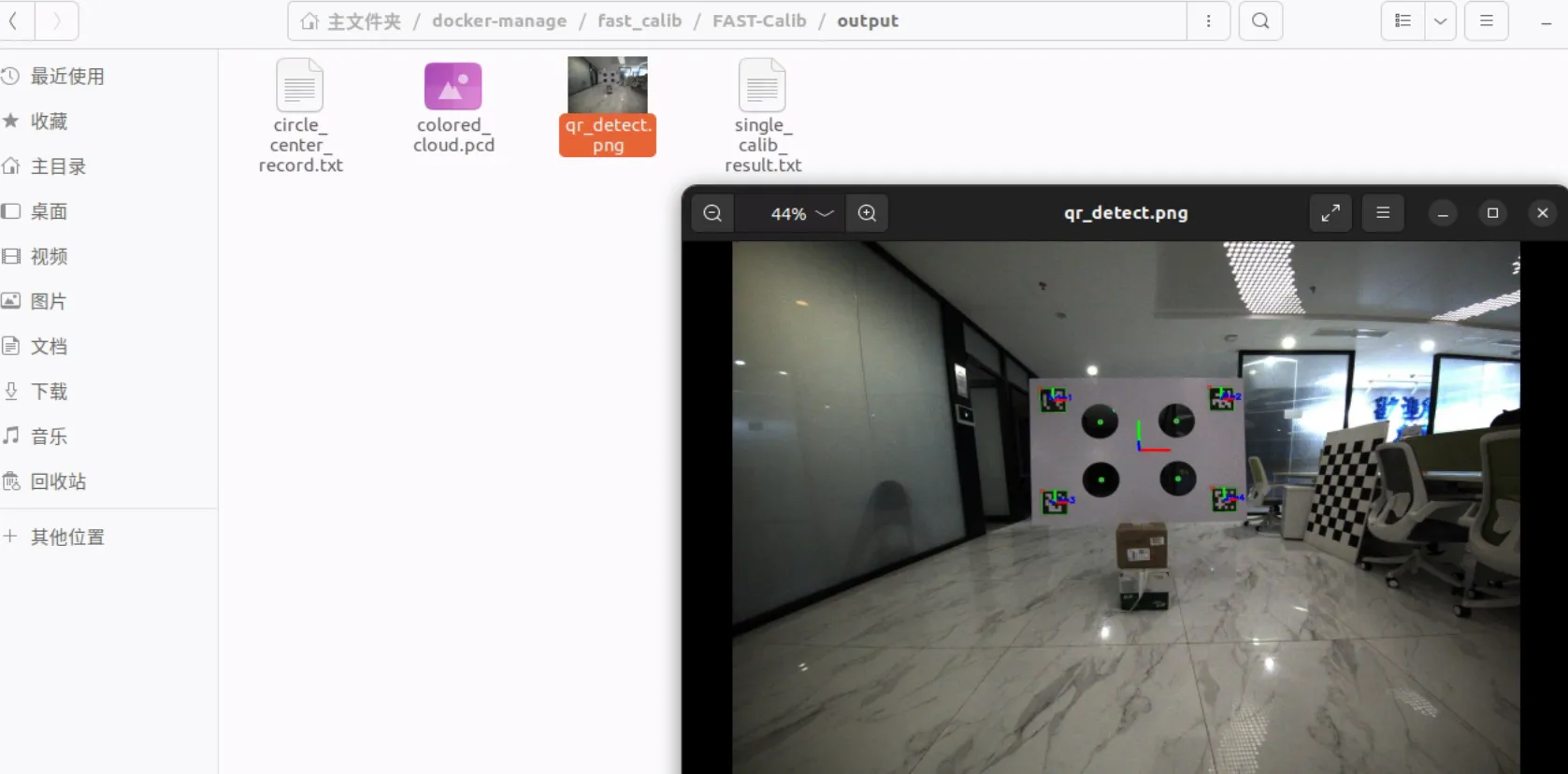
- 检查角点是否被准确提取。
可视化验证
使用 PCL 工具查看彩色点云,检查物体边缘的颜色是否对齐:
bash
# 安装 pcl-tools (如果尚未安装)
sudo apt install pcl-tools
# 查看点云
pcl_viewer colored_cloud.pcd如果颜色与点云几何结构完美贴合(例如墙上的海报、标定板边缘),则说明标定成功。
常见问题 QA
- Q: 脚本找不到标定板?
- A: 检查
Distance Filter的范围是否设置正确,必须包含标定板,且尽量排除背景杂波。
- A: 检查
- Q: 图像加载失败?
- A: 检查
image_path路径是否正确,确保使用了$(find fast_calib)前缀或绝对路径。
- A: 检查