文章目录
当你迷茫的时候,请回头看看 目录大纲,也许有你意想不到的收获
前言
前面我们讲了推导了一元线性回归问题 与 多元线性回归问题 的求解,也就是当 残差平方和(RSS) 最小时,求解 参数 W 。
- 一元线性函数:
y = w x + b y=wx+b y=wx+b
一元线性回归问题解法,最小二乘法:
w b = ∑ i = 1 m x i 2 ∑ i = 1 m x i ∑ i = 1 m x i m − 1 ∑ i = 1 m x i y i ∑ i = 1 m y i \begin{bmatrix} w\\10pt b \end{bmatrix} =\begin{bmatrix} \sum\limits_{i=1}^{m}{x_i}^2 & \sum\limits_{i=1}^{m}{x_i} \\10pt \sum\limits_{i=1}^{m}{x_i} & m \end{bmatrix}^{-1} \begin{bmatrix} \sum\limits_{i=1}^{m}{x_i y_i}\\10pt \sum\limits_{i=1}^{m}y_i \end{bmatrix} wb = i=1∑mxi2i=1∑mxii=1∑mxim −1 i=1∑mxiyii=1∑myi
- 多元线性函数:
y = w 1 x 1 + w 2 x 2 + . . . + b y=w_1x_1+w_2x_2+...+b y=w1x1+w2x2+...+b
多元线性回归的解法,正规方程:
W = ( X T X ) − 1 X T Y W=(X^TX)^{-1}X^TY W=(XTX)−1XTY
其中,一元线性函数可以视为特殊的多元函数,也适合用多元线性回归的解法,并且上篇也已得证。
然而生活中的大多函数都是非线性,线性求解存在局限,因此需要一种通用求解的方法,那就是梯度下降法。
梯度示例
来一个简单的函数
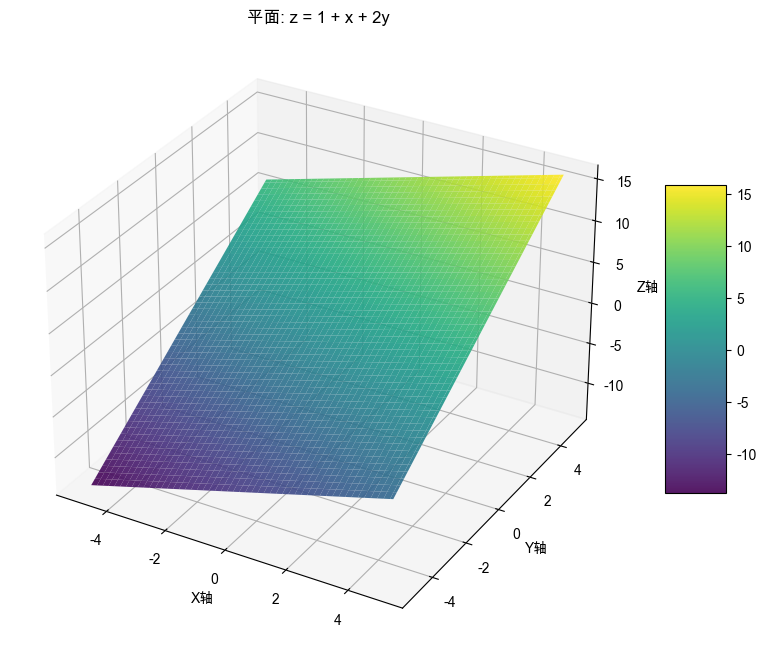
z = 1 + x + 2 y z=1+x+2y z=1+x+2y
怎么理解呢?还是拿前面的主角小猪来举例吧,小猪开始重 1 斤,吃 1 碗饭长 1 斤肉,用 x 表示饭量,纯吃饭成长速度为 w 1 = 1 w_1=1 w1=1,吃 1 碗饲料长 2 斤肉,用 y 表示饲料量,纯吃饲料成长的速度为 w 2 = 2 w_2=2 w2=2,那么 z 表示小猪的重量。即:
w 1 = ∂ z ∂ x = 1 w 2 = ∂ z ∂ y = 2 w_1=\frac{\partial{z}}{\partial{x}}=1\\10pt w_2=\frac{\partial{z}}{\partial{y}}=2\\10pt w1=∂x∂z=1w2=∂y∂z=2
可以这么说,z 的梯度是一个向量,我喜欢用 列向量 表示( ∇ \nabla ∇ 读作 nabla):
∇ z = ∂ z ∂ x ∂ z ∂ y = w 1 w 2 \nabla z =\begin{bmatrix} \frac{\partial{z}}{\partial{x}}\\10pt \frac{\partial{z}}{\partial{y}} \end{bmatrix} =\begin{bmatrix} w_1\\10pt w_2 \end{bmatrix} ∇z= ∂x∂z∂y∂z = w1w2
如果给它喂一碗东西(饭与饲料混合物),怎样才能让它长的最快呢?
给我们的感觉是 全喂饲料 长的快啊!
是的,相信自己感觉,没毛病。
但在微分领域中不太一样,还要考虑 方向,它改变了加法的性质(平行四边形法则),从而使增长比 等量 纯喂快,其实是在耍流氓,根本不是等量,早超过一碗的量了,下面我们就来手撕它!
微分推导
在宏观中一碗太大了,增加一点都容易察觉出不一样,现在我们把这个碗缩小缩小,一直压缩到看不见,那这碗食量就是趋向于0。一个小碗的食量假如是 Δ r \Delta r Δr:
- 如果这个
小碗全装饭,那么小猪吃后会长 Δ r \Delta r Δr 斤肉; - 如果这个
小碗全装饲料,那么小猪吃后会长 2 ⋅ Δ r 2\cdot\Delta r 2⋅Δr 斤肉;
到这里应该都没什么问题,也符合正常的成长速度。
好了,现在带上 方向 吧,现在有两个方向,一个是纯吃饭的方向(x轴方向),一个是纯吃饲料的方向(y轴方向),体重就是 z 轴方向,在直角坐标系中, z = 1 + x + 2 y z=1+x+2y z=1+x+2y 就是一个平面。
为了清晰统一,本文中带上箭头的表示矢量(数值+方向),例如 Δ r ⃗ , Δ x ⃗ , Δ y ⃗ \Delta \vec{r},\Delta \vec{x},\Delta \vec{y} Δr ,Δx ,Δy ,没有的表示标量(仅数值),例如 Δ z , Δ x , Δ y \Delta z,\Delta x,\Delta y Δz,Δx,Δy。
现在初始小猪重1斤,位于O ( x 0 , y 0 , z 0 ) = ( 0 , 0 , 1 ) (x_0,y_0,z_0)=(0,0,1) (x0,y0,z0)=(0,0,1),现在把 Δ r ⃗ \Delta \vec{r} Δr 分为两部分(都是有方向的向量),一部分装饭 Δ x ⃗ \Delta \vec{x} Δx ,一部分装饲料 Δ y ⃗ \Delta \vec{y} Δy , x ⃗ ⊥ y ⃗ \vec{x}\bot \vec{y} x ⊥y ,那么就到了 P ( x 0 + Δ x , y 0 + Δ y , z 0 + Δ z ) (x_0+\Delta x,y_0+\Delta y,z_0+\Delta z) (x0+Δx,y0+Δy,z0+Δz)
下面重点来了:
Δ r ⃗ = Δ x ⃗ + Δ y ⃗ ∣ Δ r ∣ = ∣ Δ x ∣ 2 + ∣ Δ y ∣ 2 ∣ Δ r ∣ ≤ ∣ Δ x ∣ + ∣ Δ y ∣ \Delta \vec{r}= \Delta \vec{x} + \Delta \vec{y}\\10pt |\Delta r|=\sqrt{|\Delta x|^2+|\Delta y|^2}\\10pt |\Delta r| \le |\Delta x| +|\Delta y| Δr =Δx +Δy ∣Δr∣=∣Δx∣2+∣Δy∣2 ∣Δr∣≤∣Δx∣+∣Δy∣
它满足向量相加(平行四边形相加),并不是普通的标量相加,模长满足勾股定理。
这里就是微观与宏观的不同,这也将导致我们在微观的结论与宏观不一样。
在宏观世界中,吃 纯一碗饲料 与吃 一碗混合物 相比,纯一碗饲料长的肉是最多的。
而在微观下,吃一碗 饭与饲料混合物 反而长的比 纯一碗饲料 要快,本质上就是因为微观上的向量分解,而且每个方向都相互垂直。有了 方向 就改变了加法的性质,其实是耍流氓,明明喂了 超过一碗的食量, ∣ Δ x ∣ + ∣ Δ y ∣ ≥ ∣ Δ r ∣ |\Delta x| +|\Delta y|\ge|\Delta r| ∣Δx∣+∣Δy∣≥∣Δr∣,愣是说满足 平行四边形相加,只喂了一碗 ∣ Δ r ∣ |\Delta r| ∣Δr∣ 的量!
它就是 欺负你微观中看不出来,所以小猪长的比纯喂一碗的快,就不足为奇了,下面我们就来推导一下吧!
令小猪增长体重为 Δ z \Delta z Δz,一小碗食量为 Δ r \Delta r Δr,其中饭量为 Δ x \Delta x Δx,饲料量为 Δ y \Delta y Δy,这里 Δ z , Δ r , Δ x , Δ y \Delta z ,\Delta r, \Delta x,\Delta y Δz,Δr,Δx,Δy 都是标量
那么有如下关系:
全微分 : d z = ∂ z ∂ x d x + ∂ z ∂ y d y = d x + 2 d y 增量形式 : Δ z = z ( x 0 + Δ x , y 0 + Δ y ) − z ( x 0 , y 0 ) = 1 ⋅ Δ x + 2 ⋅ Δ y 全微分: dz=\frac{\partial{z}}{\partial{x}}dx+\frac{\partial{z}}{\partial{y}}dy=dx+2dy\\10pt 增量形式: \Delta z= z(x_0+\Delta x,y_0+\Delta y)-z(x_0,y_0)\\10pt = 1\cdot \Delta x +2 \cdot \Delta y 全微分:dz=∂x∂zdx+∂y∂zdy=dx+2dy增量形式:Δz=z(x0+Δx,y0+Δy)−z(x0,y0)=1⋅Δx+2⋅Δy
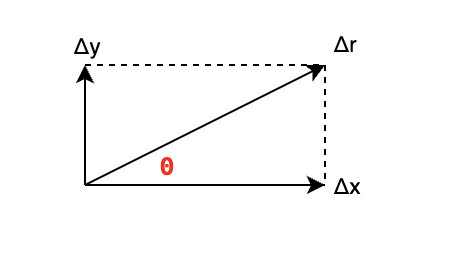
因为 Δ x , Δ y 与 Δ r \Delta x , \Delta y 与 \Delta r Δx,Δy与Δr 有勾股关系,所以令
Δ x = Δ r ⋅ cos θ Δ y = Δ r ⋅ sin θ \Delta x=\Delta r \cdot \cos \theta \\10pt \Delta y=\Delta r \cdot \sin \theta \\10pt Δx=Δr⋅cosθΔy=Δr⋅sinθ
则有
Δ z = 1 ⋅ Δ r cos θ + 2 ⋅ Δ r sin θ \Delta z= 1 \cdot \Delta r \cos \theta +2 \cdot \Delta r \sin \theta Δz=1⋅Δrcosθ+2⋅Δrsinθ
令
sin α = 1 1 + 2 2 = 1 5 cos α = 2 1 + 2 2 = 2 5 tan α = 1 2 \sin \alpha = \frac{1}{\sqrt{1+2^2}}=\frac{1}{\sqrt{5}}\\10pt \cos \alpha = \frac{2}{\sqrt{1+2^2}}=\frac{2}{\sqrt{5}}\\10pt \tan \alpha=\frac{1}{2} sinα=1+22 1=5 1cosα=1+22 2=5 2tanα=21
上式可以化为
Δ z = 5 Δ r ⋅ ( sin α cos θ + cos α sin θ ) = 5 Δ r ⋅ sin ( α + θ ) \Delta z= \sqrt{5} \Delta r \cdot (\sin{\alpha} \cos{\theta} +\cos{\alpha} \sin{\theta})\\10pt =\sqrt{5}\Delta r \cdot \sin{(\alpha+\theta)} Δz=5 Δr⋅(sinαcosθ+cosαsinθ)=5 Δr⋅sin(α+θ)
惊不惊喜?意不意外?死去的高中记忆瞬间活了过来!
Δ z \Delta z Δz 有最大值,即:
α + θ = π 2 Δ z m a x = 5 Δ r \alpha+\theta = \frac{\pi}{2}\\10pt \Delta z_{max} =\sqrt{5} \Delta r α+θ=2πΔzmax=5 Δr
梯度
这说明什么? α \alpha α 是已知角度( tan α = w 1 w 2 = 1 2 \tan{\alpha}=\frac{w_1}{w_2}=\frac{1}{2} tanα=w2w1=21),那么, Δ r ⃗ \Delta \vec{r} Δr 方向与向量 l ⃗ ( 1 , 2 ) \vec{l}(1,2) l (1,2) 同向时, Δ z \Delta z Δz 取到最大,且最大值为 5 Δ r \sqrt{5}\Delta r 5 Δr,列举几个值观察一下:
| θ \theta θ | 0 0 0 | π 6 \frac{\pi}{6} 6π | π 3 \frac{\pi}{3} 3π | π 2 \frac{\pi}{2} 2π |
|---|---|---|---|---|
| Δ x = Δ r cos θ \Delta x=\Delta r \cos \theta Δx=Δrcosθ | Δ r \Delta r Δr | 3 2 Δ r \frac{\sqrt{3}}{2} \Delta r 23 Δr | 1 2 Δ r \frac{1}{2} \Delta r 21Δr | 0 0 0 |
| Δ y = Δ r sin θ \Delta y=\Delta r \sin \theta Δy=Δrsinθ | 0 0 0 | 1 2 Δ r \frac{1}{2}\Delta r 21Δr | 3 2 Δ r \frac{\sqrt{3}}{2}\Delta r 23 Δr | Δ r \Delta r Δr |
| Δ x + Δ y \Delta x+\Delta y Δx+Δy | Δ r \Delta r Δr | 3 + 1 2 Δ r = 1.366 Δ r \frac{\sqrt{3}+1}{2}\Delta r\\=1.366\Delta r 23 +1Δr=1.366Δr | 1 + 3 2 Δ r = 1.366 Δ r \frac{1+\sqrt{3}}{2}\Delta r\\=1.366\Delta r 21+3 Δr=1.366Δr | Δ r \Delta r Δr |
| Δ z = Δ x + 2 Δ y \Delta z=\Delta x+2\Delta y Δz=Δx+2Δy | Δ r \Delta r Δr | 3 + 2 2 Δ r = 1.866 Δ r \frac{\sqrt{3}+2}{2}\Delta r\\=1.866\Delta r 23 +2Δr=1.866Δr | 1 + 2 3 2 Δ r = 2.232 Δ r \frac{1+2\sqrt{3}}{2}\Delta r\\=2.232\Delta r 21+23 Δr=2.232Δr | 2 Δ r 2\Delta r 2Δr |
- 喂的食量 ∣ Δ x ∣ + ∣ Δ y ∣ |\Delta x|+|\Delta y| ∣Δx∣+∣Δy∣ ≥ \ge ≥ 一碗的量 ∣ Δ r ∣ |\Delta r| ∣Δr∣
- 即使食量相同,得到的增量 Δ z \Delta z Δz也不一定一样,例如纯一碗饭与纯一碗饲料,因为增长的方向不同
- 改变 Δ x , Δ y \Delta x,\Delta y Δx,Δy 的大小比例,其实就在改变增长的方向,因为函数在方向上的导数不一样,因此结果增量 Δ z \Delta z Δz也就不一定一样了
用向量的知识应该更容易理解:
Δ z = Δ x + 2 Δ y = ∂ z ∂ x ∂ z ∂ y Δ x Δ y = 1 2 Δ x Δ y \Delta z=\Delta x+2\Delta y\\10pt =\begin{bmatrix} \frac{\partial{z}}{\partial{x}}&\frac{\partial{z}}{\partial{y}} \end{bmatrix} \begin{bmatrix} \Delta x \\10pt \Delta y \end{bmatrix}\\10pt =\begin{bmatrix} 1&2 \end{bmatrix} \begin{bmatrix} \Delta x \\10pt \Delta y \end{bmatrix} Δz=Δx+2Δy=∂x∂z∂y∂z ΔxΔy =12 ΔxΔy
这里梯度向量为 ∇ z ⃗ \nabla \vec{z} ∇z :
∇ z ⃗ = ∂ z ∂ x ∂ z ∂ y = 1 2 \nabla \vec{z}=\begin{bmatrix} \frac{\partial{z}}{\partial{x}}\\10pt \frac{\partial{z}}{\partial{y}} \end{bmatrix} =\begin{bmatrix} 1\\10pt 2 \end{bmatrix} ∇z = ∂x∂z∂y∂z = 12
而增量 Δ z \Delta z Δz 就是两个向量 ∇ ⃗ ( 1 , 2 ) 与 Δ r ⃗ ( Δ x , Δ y ) \vec{\nabla} (1,2) 与 \Delta \vec{r}(\Delta x,\Delta y) ∇ (1,2)与Δr (Δx,Δy)的点积,只有当两个向量共线同向时,点积最大并且最大值为 5 Δ r = 5 ( Δ x ) 2 + ( Δ y ) 2 \sqrt{5}\Delta{r}=\sqrt{5}\sqrt{(\Delta x)^2+(\Delta y)^2} 5 Δr=5 (Δx)2+(Δy)2
也可以这样说: 在任意方向 l ⃗ \vec{l} l ,沿着这个方向增长一个 Δ r ⃗ \Delta \vec{r} Δr ,等效向量分解成一个 Δ x ⃗ \Delta \vec{x} Δx 向量增长 与一个 Δ y ⃗ \Delta \vec{y} Δy 向量增长,那么 z 相应地增长一个 Δ z \Delta z Δz,当这个方向 l ⃗ \vec{l} l 刚好与 梯度 方向一致时,z 的增量 Δ z \Delta z Δz 可以达到最大化,也就是小猪长的最快的时候饭与饲料比例混合。
针对于一个函数
y = f ( w 1 , w 2 , ... , b ) = w 1 x 1 + w 2 x 2 + . . . + b y=f(w_1,w_2,\dots,b)=w_1x_1+w_2x_2+...+b y=f(w1,w2,...,b)=w1x1+w2x2+...+b
它的梯度为一个向量,用矩阵表示为:
∇ f ⃗ = ∂ f ∂ w 1 ∂ f ∂ w 2 ... ∂ f ∂ w n ∂ f ∂ b \nabla \vec{f}=\begin{bmatrix} \frac{\partial{f}}{\partial{w_1}}\\10pt \frac{\partial{f}}{\partial{w_2}}\\10pt \dots\\10pt \frac{\partial{f}}{\partial{w_n}}\\10pt \frac{\partial{f}}{\partial{b}}\\10pt \end{bmatrix} ∇f = ∂w1∂f∂w2∂f...∂wn∂f∂b∂f
对于高维的方向就只能靠想像了,但结论都是一样的,只要变量在 梯度方向 上增长一个单位,例如: Δ w \Delta w Δw,这时 Δ f \Delta f Δf 是最大的。
梯度下降法
再回过头来看上面的示例:
Δ z = 5 Δ r ⋅ ( sin α cos θ + cos α sin θ ) = 5 Δ r ⋅ sin ( α + θ ) \Delta z= \sqrt{5} \Delta r \cdot (\sin{\alpha} \cos{\theta} +\cos{\alpha} \sin{\theta})\\10pt =\sqrt{5}\Delta r \cdot \sin{(\alpha+\theta)} Δz=5 Δr⋅(sinαcosθ+cosαsinθ)=5 Δr⋅sin(α+θ)
Δ z \Delta z Δz 也有最小值,即:
α + θ = 3 π 2 Δ z m i n = − 5 Δ r \alpha+\theta = \frac{3\pi}{2}\\10pt \Delta z_{min} =-\sqrt{5} \Delta r α+θ=23πΔzmin=−5 Δr
也就是变量在 梯度相反方向 上增长一个单位 Δ w \Delta w Δw,这时 Δ f \Delta f Δf 是最小的,也就是下降最快的,这就是 梯度下降 的原理。
就像爬山,沿着 陡峭悬崖 爬上山顶用时最短,调个头,沿悬崖下山也是最快的。
再比如我们刚才的小猪,按照某种比例(1饭:2饲料)给它增加食量它长的最快,那我反过来按这个比例从中减少食量,那就是减肥就最明显的。
像 RSS 这种求 最小残差平方和 的,就非常适合用梯度下降法来求解,目标是尽可能快速找到抛物面的 谷底。
用之前小猪的例子,w,b 是未知,需要根据样本数据来求的,假设满足如下函数:
y = w x + b y=wx+b y=wx+b
RSS 公式:
R S S = ∑ i = 1 m ( y i ^ − y i ) 2 RSS=\sum\limits_{i=1}^{m}{(\hat{y_i}-y_i)^2}\\10pt RSS=i=1∑m(yi^−yi)2
为了求导方便,令:
E = 1 2 R S S = 1 2 ∑ i = 1 m ( y i ^ − y i ) 2 E=\frac{1}{2}{RSS}=\frac{1}{2}\sum\limits_{i=1}^{m}{(\hat{y_i}-y_i)^2}\\10pt E=21RSS=21i=1∑m(yi^−yi)2
前面我们已经求出:
∂ E ∂ w = ∑ i = 1 m x i ( y i ^ − y i ) ∂ E ∂ b = ∑ i = 1 m ( y i ^ − y i ) \frac{\partial{E}}{\partial{w}}=\sum\limits_{i=1}^{m}x_i(\hat{y_i}-y_i)\\10pt \frac{\partial{E}}{\partial{b}}=\sum\limits_{i=1}^{m}(\hat{y_i}-y_i) ∂w∂E=i=1∑mxi(yi^−yi)∂b∂E=i=1∑m(yi^−yi)
那么 E 的梯度为:
∇ E ⃗ = ∂ E ∂ w ∂ E ∂ b ∑ i = 1 m x i ( y i \^ − y i ) ∑ i = 1 m ( y i \^ − y i ) \nabla \vec{E}=\begin{bmatrix} \frac{\partial{E}}{\partial{w}}\\10pt \frac{\partial{E}}{\partial{b}} \end{bmatrix}\begin{bmatrix} \sum\limits_{i=1}^{m}x_i(\hat{y_i}-y_i)\\10pt \sum\limits_{i=1}^{m}(\hat{y_i}-y_i) \end{bmatrix} ∇E = ∂w∂E∂b∂E i=1∑mxi(yi^−yi)i=1∑m(yi^−yi)
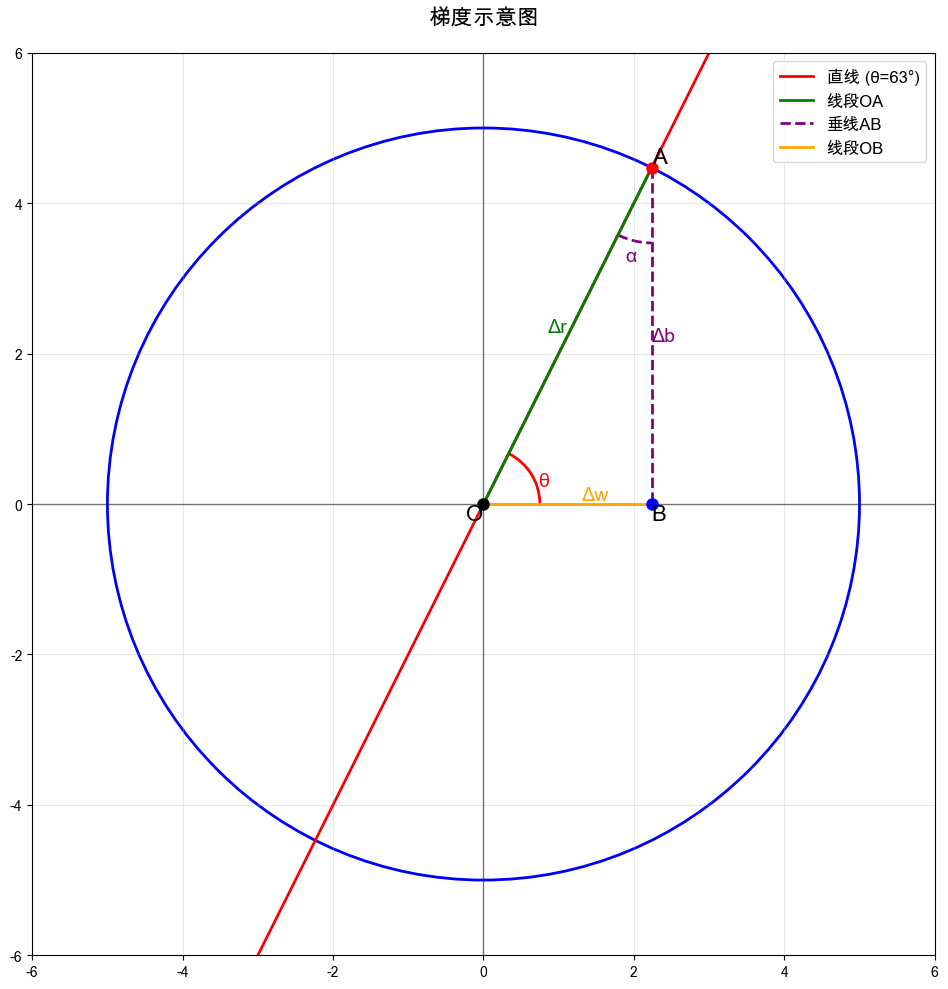
按照梯度的方向下降一个增量为 Δ r \Delta r Δr,那么向量分解到 w 方向上的增量为 Δ w \Delta w Δw,分解到 b 方向上的增量为 Δ b \Delta b Δb,三者有勾股关系
∣ Δ r ∣ 2 = ∣ Δ w ∣ 2 + ∣ Δ b ∣ 2 ∣ Δ w ∣ = ∣ Δ r ∣ cos θ ∣ Δ b ∣ = ∣ Δ r ∣ sin θ |\Delta r|^2=\sqrt{|\Delta w|^2+|\Delta b|^2}\\10pt |\Delta w|=|\Delta r|\cos \theta\\10pt |\Delta b|=|\Delta r|\sin \theta\\10pt ∣Δr∣2=∣Δw∣2+∣Δb∣2 ∣Δw∣=∣Δr∣cosθ∣Δb∣=∣Δr∣sinθ
其中, θ \theta θ 是可以根据样本量求得的:
tan θ = ∂ E ∂ b ∂ E ∂ w = ∑ i = 1 m ( y i ^ − y i ) ∑ i = 1 m x i ( y i ^ − y i ) θ = arctan ∑ i = 1 m ( y i ^ − y i ) ∑ i = 1 m x i ( y i ^ − y i ) cos θ = ∂ E ∂ w ( ∂ E ∂ w ) 2 + ( ∂ E ∂ b ) 2 = ∑ i = 1 m x i ( y i ^ − y i ) ( ∑ i = 1 m x i ( y i ^ − y i ) ) 2 + ( ∑ i = 1 m ( y i ^ − y i ) ) 2 sin θ = ∂ E ∂ b ( ∂ E ∂ w ) 2 + ( ∂ E ∂ b ) 2 = ∑ i = 1 m ( y i ^ − y i ) ( ∑ i = 1 m x i ( y i ^ − y i ) ) 2 + ( ∑ i = 1 m ( y i ^ − y i ) ) 2 % tan \tan \theta=\frac{\frac{\partial{E}}{\partial{b}}}{\frac{\partial{E}}{\partial{w}}} =\frac{\sum\limits_{i=1}^{m}(\hat{y_i}-y_i)}{\sum\limits_{i=1}^{m}x_i(\hat{y_i}-y_i)}\\10pt \theta= \arctan{\frac{\sum\limits_{i=1}^{m}(\hat{y_i}-y_i)}{\sum\limits_{i=1}^{m}x_i(\hat{y_i}-y_i)}}\\10pt % cos \cos \theta=\frac{\frac{\partial{E}}{\partial{w}}}{\sqrt{(\frac{\partial{E}}{\partial{w}})^2+(\frac{\partial{E}}{\partial{b}})^2}}\\10pt =\frac{\sum\limits_{i=1}^{m}x_i(\hat{y_i}-y_i)}{\sqrt{({\sum\limits_{i=1}^{m}x_i(\hat{y_i}-y_i)})^2+(\sum\limits_{i=1}^{m}(\hat{y_i}-y_i))^2}}\\10pt % sin \sin \theta=\frac{\frac{\partial{E}}{\partial{b}}}{\sqrt{(\frac{\partial{E}}{\partial{w}})^2+(\frac{\partial{E}}{\partial{b}})^2}}\\10pt =\frac{\sum\limits_{i=1}^{m}(\hat{y_i}-y_i)}{\sqrt{({\sum\limits_{i=1}^{m}x_i(\hat{y_i}-y_i)})^2+(\sum\limits_{i=1}^{m}(\hat{y_i}-y_i))^2}}\\10pt tanθ=∂w∂E∂b∂E=i=1∑mxi(yi^−yi)i=1∑m(yi^−yi)θ=arctani=1∑mxi(yi^−yi)i=1∑m(yi^−yi)cosθ=(∂w∂E)2+(∂b∂E)2 ∂w∂E=(i=1∑mxi(yi^−yi))2+(i=1∑m(yi^−yi))2 i=1∑mxi(yi^−yi)sinθ=(∂w∂E)2+(∂b∂E)2 ∂b∂E=(i=1∑mxi(yi^−yi))2+(i=1∑m(yi^−yi))2 i=1∑m(yi^−yi)
做个简化,令
η = 1 ( ∑ i = 1 m x i ( y i ^ − y i ) ) 2 + ( ∑ i = 1 m ( y i ^ − y i ) ) 2 Δ w = Δ r cos θ = η Δ r ⋅ ∂ E ∂ w Δ b = Δ r sin θ = η Δ r ⋅ ∂ E ∂ b \eta= \frac{1}{\sqrt{({\sum\limits_{i=1}^{m}x_i(\hat{y_i}-y_i)})^2+(\sum\limits_{i=1}^{m}(\hat{y_i}-y_i))^2}}\\10pt \Delta w=\Delta r\cos \theta =\eta\Delta r \cdot \frac{\partial{E}}{\partial{w}}\\10pt \Delta b=\Delta r\sin \theta =\eta \Delta r \cdot \frac{\partial{E}}{\partial{b}}\\10pt η=(i=1∑mxi(yi^−yi))2+(i=1∑m(yi^−yi))2 1Δw=Δrcosθ=ηΔr⋅∂w∂EΔb=Δrsinθ=ηΔr⋅∂b∂E
参数更新后为:
w t + 1 = w t − Δ w = w t − η Δ r ∂ E ∂ w b t + 1 = b t − Δ b = b t − η Δ r ∂ E ∂ b w_{t+1}=w_t-\Delta w=w_t- \eta \Delta r \frac{\partial{E}}{\partial{w}}\\10pt b_{t+1}=b_t-\Delta b=b_t-\eta \Delta r \frac{\partial{E}}{\partial{b}}\\10pt wt+1=wt−Δw=wt−ηΔr∂w∂Ebt+1=bt−Δb=bt−ηΔr∂b∂E
这就是在各种资料出现的梯度下降的公式,为了更进一步简化, 步长 η \eta η 不用上面那么准确地求解,直接用一个很小的数值来代替,比如 0.01,步长越小,意味爬得慢,一点一点往下爬,迭代次数越多,需要很多次才走到谷底,即最后找到一组 w , b w,b w,b,使RSS达到最小。
反向传播
那么到底下降多少呢?这就要定 Δ r \Delta r Δr 了,为了简便,直接用 Δ E \Delta E ΔE,也就是预测值与真实值之间的误差平方和。
Δ r \Delta r Δr 与 Δ E \Delta E ΔE 之间就像中间存在一个杠杆一样,如果误差 Δ E \Delta E ΔE 太大,那我就调一下 Δ r \Delta r Δr,分解对应着 Δ w \Delta w Δw, Δ b \Delta b Δb,让它回退一点点,就能让误差也小一点,这就是误差 反向传播 机制。
python 验证
生成一些随机数据
python
import numpy as np
import matplotlib.pyplot as plt
# 生成一些随机数据
np.random.seed(0)
x = 2 * np.random.rand(100, 1)
y = 4 + 3 * x + np.random.randn(100, 1)
# 可视化数据
plt.scatter(x, y)
plt.xlabel('x')
plt.ylabel('y')
plt.title('Data')
plt.show()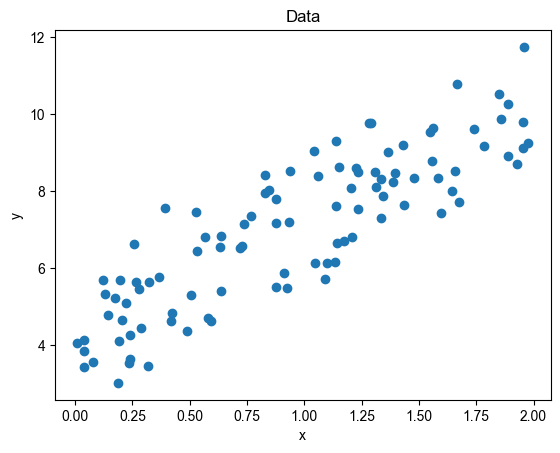
梯度下降算法实现
python
# 初始化参数
w = 0
b = 0
m = len(x)
lr = 0.01
round = 1000
#训练
for i in range(round):
y_pred = w * x + b
dw = (1/m) * np.sum(x * (y_pred-y))
db = (1/m) * np.sum(y_pred-y)
# print(f'dw={dw},db={db}')
w = w - lr * dw
b = b - lr * db
# 输出最终参数
print(f"w={w},b={b}")例如求得结果为:w=3.125936517774015,b=4.0446871544206235
可视化手动实现的拟合结果:
python
y_pred = w * x + b
plt.scatter(x, y)
plt.plot(x, y_pred, color='green')
plt.xlabel('x')
plt.ylabel('y')
plt.title('Manual Gradient Descent Fit')
plt.show()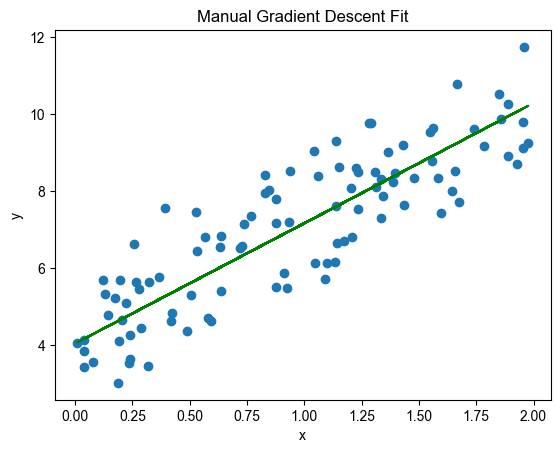
均方差 MSE
有点地方要注意的是,大多数教程都是用均方差作为损失函数
M S E = 1 m R S S = 1 m ∑ i = 1 m ( y i ^ − y i ) 2 MSE=\frac{1}{m}{RSS} =\frac{1}{m}\sum\limits_{i=1}^{m}{(\hat{y_i}-y_i)^2}\\10pt MSE=m1RSS=m1i=1∑m(yi^−yi)2
那为了求导少带系数,再除以个2,得到 J
J ( w , b ) = 1 2 M S E = 1 2 m R S S = 1 2 m ∑ i = 1 m ( y i ^ − y i ) 2 J(w,b)=\frac{1}{2}{MSE}=\frac{1}{2m}{RSS} =\frac{1}{2m}\sum\limits_{i=1}^{m}{(\hat{y_i}-y_i)^2}\\10pt J(w,b)=21MSE=2m1RSS=2m1i=1∑m(yi^−yi)2
而在上面理论推导,我为了求导方便少带系数采用了 E:
E = 1 2 R S S = 1 2 ∑ i = 1 m ( y i ^ − y i ) 2 E=\frac{1}{2}{RSS}=\frac{1}{2}\sum\limits_{i=1}^{m}{(\hat{y_i}-y_i)^2}\\10pt E=21RSS=21i=1∑m(yi^−yi)2
J 比 E 多除了个 m,即:
J = 1 2 m R S S = 1 m E J=\frac{1}{2m}{RSS}=\frac{1}{m}{E} J=2m1RSS=m1E
影响梯度偏导也多除一个 m,即:
∇ J ⃗ = ∂ J ∂ w ∂ J ∂ b 1 m ∑ i = 1 m x i ( y i \^ − y i ) 1 m ∑ i = 1 m ( y i \^ − y i ) \nabla \vec{J}=\begin{bmatrix} \frac{\partial{J}}{\partial{w}}\\10pt \frac{\partial{J}}{\partial{b}} \end{bmatrix}\begin{bmatrix} \frac{1}{m}\sum\limits_{i=1}^{m}x_i(\hat{y_i}-y_i)\\10pt \frac{1}{m}\sum\limits_{i=1}^{m}(\hat{y_i}-y_i) \end{bmatrix} ∇J = ∂w∂J∂b∂J m1i=1∑mxi(yi^−yi)m1i=1∑m(yi^−yi)
这样会让反向传播中的 Δ E \Delta E ΔE 小一点,相应地 Δ w , Δ b \Delta w,\Delta b Δw,Δb 也会变化小点,我程序上也用的是这个
python
dw = (1/m) * np.sum(x * (y_pred-y))
db = (1/m) * np.sum(y_pred-y)从训练结果上来看,这个常量不会对最终结果有什么影响,但会影响步长,从而影响收敛速度。
有一点要注意,m 必须大于1,这里所讲的 m 仅仅是一个数值,并不代表样本总数,也就是 (1/m) 这个系数要小于1,不然结果离谱得很,会发散数值溢出,而当 m >1,即 (1/m) 这个系数小于1 时,结果收敛,它的作用也有可能就是想让计算机在计算时避免大数值的溢出。
造成与理论差异关键就在于实用时用估算值替代,比如 η \eta η 直接是用 0.01 估算, Δ r \Delta r Δr 也直接用 Δ E \Delta E ΔE 来代替,这些都可能影响到训练时的步长。
下面是程序实验计算的结果:
m=1时,结果已经发散,求不出 w 与 b,即
bash
# dw = np.sum(x * (y_pred-y))
# db = np.sum(y_pred-y)
dw=-850.1683501683501,db=3.552713678800501e-15
dw=6377.693886111394,db=-4.263256414560601e-14
dw=-47843.44100422958,db=4.547473508864641e-13
dw=358906.352045197,db=-1.8189894035458565e-12
dw=-2692401.859786865,db=1.2732925824820995e-11
...
dw=-5.4253529775673765e+305,db=7.918067634262499e+288
dw=4.069928092262665e+306,db=-7.308985508549999e+289
dw=-3.053131242276504e+307,db=9.745314011399999e+290
dw=inf,db=-1.559250241824e+290
dw=-inf,db=nanm=2时,得到结果与最小二乘法算到的是一样大小:
bash
# dw = 1/2 * np.sum(x * (y_pred-y))
# db = 1/2 * np.sum(y_pred-y)
dw=-381.677900861596,db=-351.4548690576116
dw=18.57224973839901,db=4.727525676626343
dw=4.946675978330024,db=-6.4170824238898465
dw=4.946818532305948,db=-5.547299140563914
dw=4.535645479339176,db=-5.112474897542561
dw=4.171064141390431,db=-4.700662689615653
...
dw=1.2484696436387832e-14,db=-2.4868995751603507e-14
dw=1.2484696436387832e-14,db=-2.4868995751603507e-14
dw=1.2484696436387832e-14,db=-2.4868995751603507e-14
w=2.9684675107010214,b=4.222151077447227m=len(x)=100时,也就是与样本数量一致时:
bash
# dw = 1/m * np.sum(x * (y_pred-y))
# db = 1/m * np.sum(y_pred-y)
dw=-7.633558017231921,db=-7.029097381152232
dw=-7.47345795699192,db=-6.886624423258533
dw=-7.316668902546804,db=-6.747090081387518
dw=-7.163122453666059,db=-6.6104336609161045
dw=-7.012751623042291,db=-6.4765957209516
dw=-6.865490807105078,db=-6.345518048433969
dw=-6.721275757437722,db=-6.217143632773047
dw=-6.580043552784417,db=-6.091416641009688
...
dw=0.025467711868425648,db=-0.028701534563458184
dw=0.025426721224795897,db=-0.028655338763381374
dw=0.02538579655360806,db=-0.0286092173188295
w=3.125936517774015,b=4.0446871544206235当 m=2*len(x) =200 时,
bash
# dw = 1/(2*m) * np.sum(x * (y_pred-y))
# db = 1/(2*m) * np.sum(y_pred-y)
dw=-3.8167790086159603,db=-3.514548690576116
dw=-3.776753993555959,db=-3.4789304511026917
dw=-3.7371428542203198,db=-3.443679538632103
dw=-3.6979413155946346,db=-3.4087921597504054
dw=-3.659145146818342,db=-3.3742645602227346
dw=-3.620750160728698,db=-3.340093024588643
dw=-3.582752213409447,db=-3.3062738757616335
...
dw=0.028309798773081957,db=-0.032154331529856306
dw=0.028288197439600916,db=-0.03212740685678457
dw=0.028266601289693175,db=-0.03210051467730426
w=3.320819548442338,b=3.8248240221727645