车桥耦合matlab程序。 使用newmark法进行数值积分,考虑不平顺车辆-无砟轨道-桥梁耦合的动力学求解全套
直接上干货!最近在搞车桥耦合动力学分析,发现用Matlab实现Newmark-β法解这种多体耦合系统特别带劲。今天就带大家手撕代码,顺便聊聊怎么处理不平顺激励下的振动传递问题。
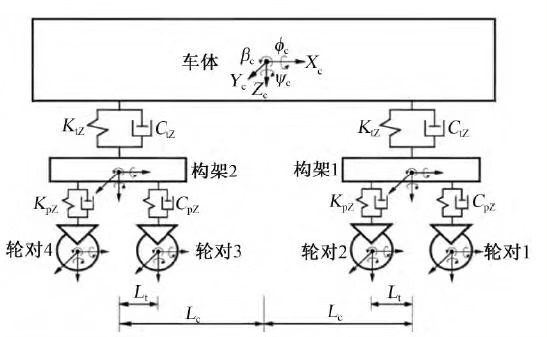
先说核心架构,咱们的模型包含三个模块:二自由度车辆模型、无砟轨道梁单元模型、桥梁实体单元。耦合的关键在于轮轨接触力的迭代计算,这里用Hertz非线性接触理论实现:
matlab
function F = Hertz_contact(z1, z2)
G = 8.43e10; % 轮轨接触常数
delta = max(z1 - z2, 0); % 轮轨压缩量
F = G * delta^(3/2); % 非线性赫兹力
end这个函数会在每个时间步被反复调用,注意max函数处理轮轨分离的情况,避免出现虚接触。
时间积分部分采用改进的Newmark-β法,比常规版本更适应强非线性问题:
matlab
beta = 0.25; gamma = 0.5; % 经典参数配置
dt = 0.001; % 时间步长要小于最小振动周期1/10
for k = 1:nt-1
% 预测步
v_pred = v(:,k) + (1-gamma)*dt*a(:,k);
d_pred = d(:,k) + dt*v(:,k) + (0.5-beta)*dt^2*a(:,k);
% 残差计算
[Fc, Jc] = Contact_Jacobian(d_pred); % 接触力及其雅可比
R = M*a(:,k) + C*v_pred + K*d_pred - Fc - F_ext;
% 修正步
a(:,k+1) = (M + gamma*dt*C + beta*dt^2*K - Jc) \ R;
v(:,k+1) = v_pred + gamma*dt*a(:,k+1);
d(:,k+1) = d_pred + beta*dt^2*a(:,k+1);
end这里把接触力的雅可比矩阵Jc显式加入系数矩阵,显著提升收敛速度。注意雅可比矩阵要包含轮轨、轨桥多个接触对的导数。
处理轨道不平顺时,采用德国低干扰谱生成随机激励:
matlab
function rough = track_roughness(L, dx)
n = round(L/dx);
phi = (0:n-1)'*2*pi/n;
S = 0.00012./((0.1:0.1:10).^2 + 0.25); % 频谱密度
rough = real(ifft(sqrt(S).*exp(1i*phi)));
end生成的不平顺信号记得要做零均值处理,否则会导致系统漂移。
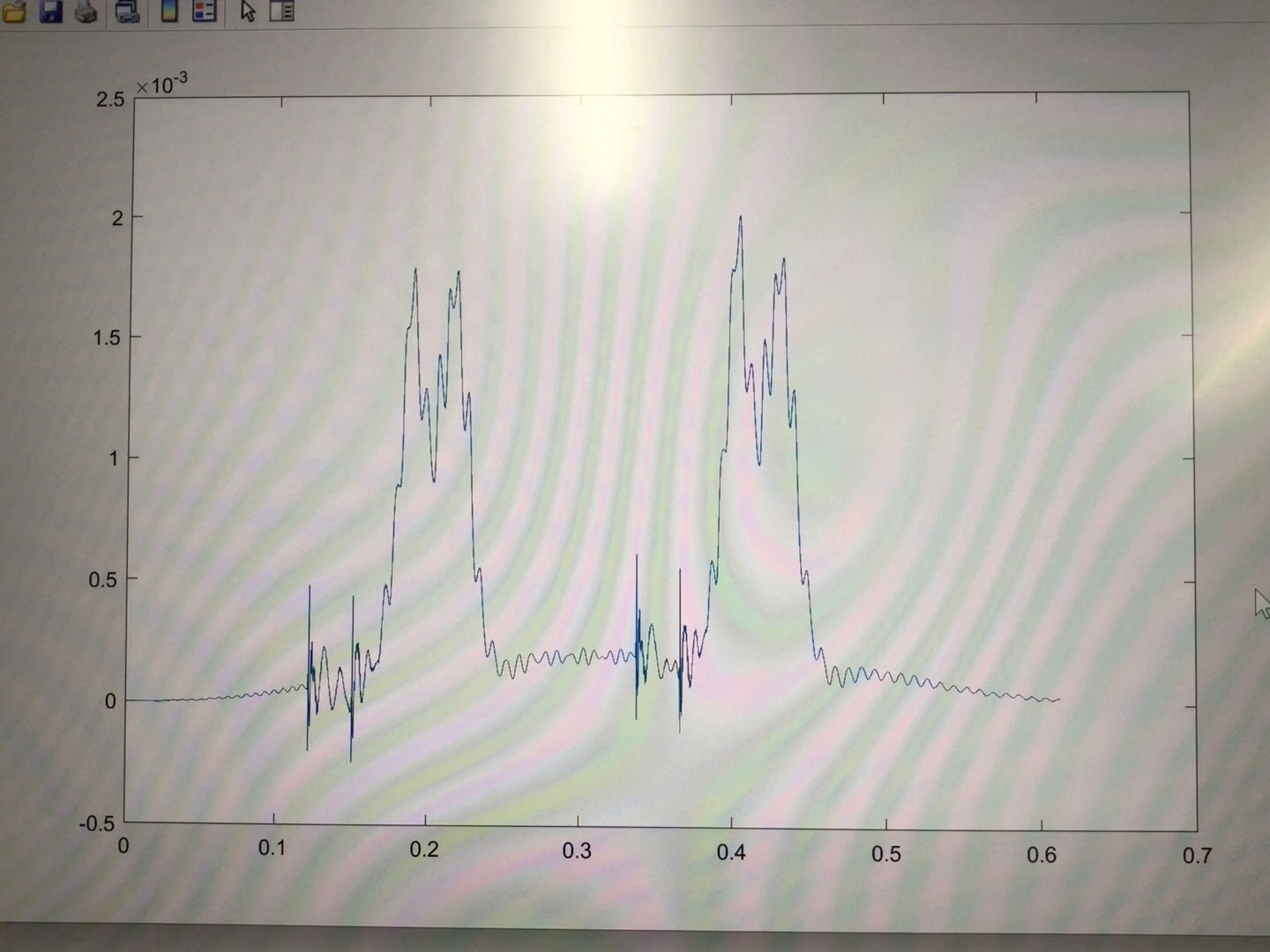
计算结果后处理时,重点关注车体加速度和桥梁跨中位移:
matlab
figure('Position',[200,200,800,300])
subplot(121)
plot(t, acc_vehicle*9.8)
title('车体垂向加速度(g)')
xlabel('时间/s'), grid on
subplot(122)
plot(t, disp_bridge(round(nb/2),:)*1000)
title('桥梁跨中位移(mm)')
xlabel('时间/s'), grid tight这种对比图能直观看出振动传递规律。注意桥梁位移要取跨中节点,那是响应最大的位置。
几个踩坑经验:
- 质量矩阵千万别用集中质量矩阵,用一致质量矩阵更稳定
- 时间步长超过1e-3秒容易发散,特别是存在钢轨扣件非线性时
- 桥梁阻尼比建议取2%-5%,实测数据校准很重要
- 并行计算加速技巧:把接触力计算改成Mex函数
完整跑完一个30秒的工况大概需要15分钟(i7-12700H),建议先调试5秒内的短工况。收敛性检查看能量误差是否小于1e-4,残差范数是否持续下降。
最后说个骚操作:把实时位移导出成AVI动画,用getframe捕捉模型振动形态,汇报时效果直接拉满。不过注意别让老板发现你在用游戏显卡跑有限元------虽然真的快很多。