在上一节,我们参考大佬古月居的IMU传感器,集成在了自己的模型上面。这一节,我们继续参考摄像头集成在自己的模型中,参考链接如下:
https://www.guyuehome.com/detail?id=1896924896297013249
1、之前sw没有建立摄像头的Link,因此通过xacro新建camera.xacro文件时候,添加camera的link进行关联,代码如下:
XML
<?xml version="1.0" encoding="utf-8"?>
<robot name="tyut_jjc_model" xmlns:xacro="http://wiki.ros.org/xacro">
<!-- ===== 相机Link定义 ===== -->
<link name="camera_link">
<inertial>
<origin xyz="0 0 0" rpy="0 0 0"/>
<mass value="0.1"/> <!-- 相机质量0.1kg -->
<inertia ixx="0.001" ixy="0" ixz="0" iyy="0.001" iyz="0" izz="0.001"/>
</inertial>
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.08 0.05 0.03"/> <!-- 小方块:长8cm x 宽5cm x 高3cm -->
</geometry>
<material name="camera_blue">
<color rgba="0.2 0.4 0.8 1.0"/> <!-- 蓝色相机外观 -->
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.08 0.05 0.03"/> <!-- 碰撞体积与视觉一致 -->
</geometry>
</collision>
</link>
<!-- ===== 相机与基座的连接关节 ===== -->
<joint name="camera_joint" type="fixed">
<origin xyz="-5.0 0 1.5" rpy="0 0.1 0"/> <!-- 安装在机器人 -->
<parent link="base_link"/>
<child link="camera_link"/>
<axis xyz="0 0 0"/>
</joint>
<gazebo reference="camera_link"> <!-- Gazebo模型引用camera_link -->
<sensor type="camera" name="camera1"> <!-- 定义传感器类型为相机 -->
<update_rate>30.0</update_rate> <!-- 更新频率为30Hz -->
<camera name="head"> <!-- 相机名称为head -->
<horizontal_fov>1.3962634</horizontal_fov> <!-- 水平视场角 -->
<image> <!-- 图像参数 -->
<width>1920</width> <!-- 图像宽度 -->
<height>1080</height> <!-- 图像高度 -->
<format>R8G8B8</format> <!-- 图像格式为R8G8B8 -->
</image>
<clip> <!-- 剪裁参数 -->
<near>0.02</near> <!-- 最近剪裁距离 -->
<far>300</far> <!-- 最远剪裁距离 -->
</clip>
<noise> <!-- 噪声参数 -->
<type>gaussian</type> <!-- 噪声类型为高斯噪声 -->
<!-- 噪声在每帧的每个像素上独立采样。每个像素的噪声值
将添加到其每个颜色通道,该通道的范围在[0,1]之间。 -->
<mean>0.0</mean> <!-- 噪声均值 -->
<stddev>0.007</stddev> <!-- 噪声标准差 -->
</noise>
</camera>
<plugin name="camera_controller" filename="libgazebo_ros_camera.so"> <!-- 相机控制插件 -->
<alwaysOn>true</alwaysOn> <!-- 插件始终开启 -->
<updateRate>0.0</updateRate> <!-- 更新频率为0(不更新) -->
<cameraName>/</cameraName> <!-- 相机名称 -->
<imageTopicName>cam</imageTopicName> <!-- 图像主题名称 -->
<cameraInfoTopicName>camera_info</cameraInfoTopicName> <!-- 相机信息主题名称 -->
<frameName>camera_link</frameName> <!-- 坐标系名称 -->
<hackBaseline>0.07</hackBaseline> <!-- 基线偏差 -->
<distortionK1>0.0</distortionK1> <!-- 畸变系数K1 -->
<distortionK2>0.0</distortionK2> <!-- 畸变系数K2 -->
<distortionK3>0.0</distortionK3> <!-- 畸变系数K3 -->
<distortionT1>0.0</distortionT1> <!-- 畸变切向分量T1 -->
<distortionT2>0.0</distortionT2> <!-- 畸变切向分量T2 -->
</plugin>
</sensor>
</gazebo>
</robot>2、集成到总体的xacro下
XML
<robot name="tyut_jjc_model" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:include filename="xacro/tyut_jjc.xacro" />
<xacro:include filename="xacro/transmission.xacro" />
<xacro:include filename="xacro/gazebo_ros_control.xacro" />
<xacro:include filename="xacro/tyut_color.xacro" />
<xacro:include filename="xacro/tyut_mu.xacro" />
<xacro:include filename="xacro/laser.xacro" />
<xacro:HDL-32E parent="base_link" name="velodyne" topic="/points_raw" hz="10" samples="1024" gpu="false">
<origin xyz="0.4 0 1.0" rpy="0 0 0" />
</xacro:HDL-32E>
<xacro:include filename="xacro/imu.xacro" />
<xacro:include filename="xacro/camera.xacro" />
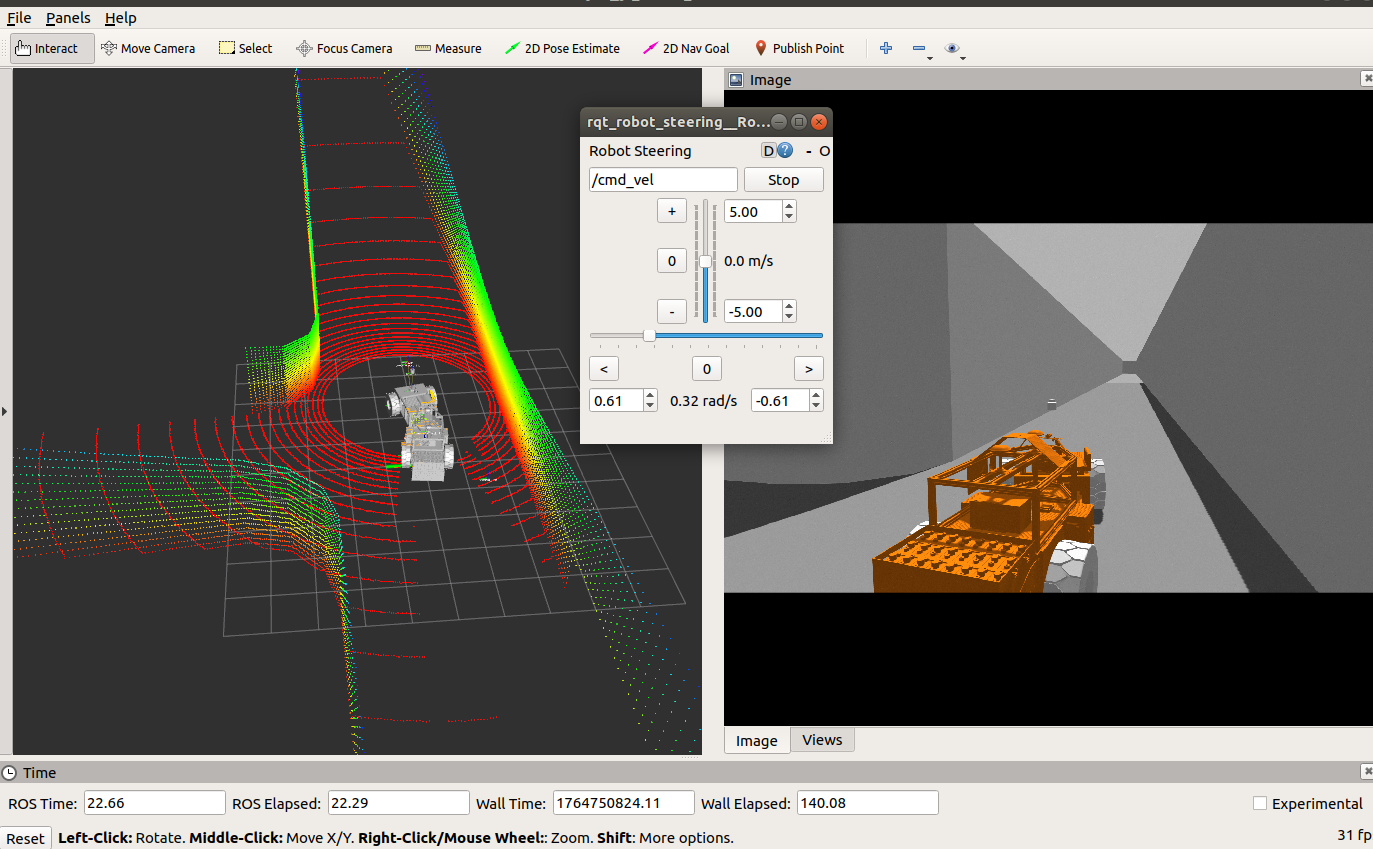
</robot>3、启动文件,在rviz中添加image话题,即可显示