OpenCV-Python 中的位平面分解是将图像像素值的二进制位拆分为不同的位平面(如最低位、最高位等),用于图像压缩、水印嵌入、特征提取等场景。每个像素值(0-255)可表示为 8 位二进制数,每一位对应一个位平面,其中高位平面保留图像的主要信息,低位平面多为噪声或细节。以下详细介绍位平面分解的原理、实现及应用:
一、位平面分解原理
图像中每个像素的灰度值(uint8类型)可表示为 8 位二进制数:pixel = b7×2⁷ + b6×2⁶ + ... + b1×2¹ + b0×2⁰其中b7(最高位)到b0(最低位)分别对应第 7 到第 0 位平面。
通过按位与运算提取每一位:
- 提取第
n位平面:bit_plane = (img >> n) & 1 - 将结果放大到 0-255(便于显示):
bit_plane * 255
二、位平面分解实现
1. 灰度图像的位平面分解
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 读取灰度图像
img = cv2.imread('image.jpg', 0)
height, width = img.shape
# 创建8个位平面
bit_planes = []
for n in range(8):
# 提取第n位平面
plane = (img >> n) & 1
# 放大到0-255
plane = plane * 255
bit_planes.append(plane)
# 显示位平面
plt.figure(figsize=(12, 8))
for i in range(8):
plt.subplot(2, 4, i+1)
plt.imshow(bit_planes[i], cmap='gray')
plt.title(f'Bit Plane {i}')
plt.axis('off')
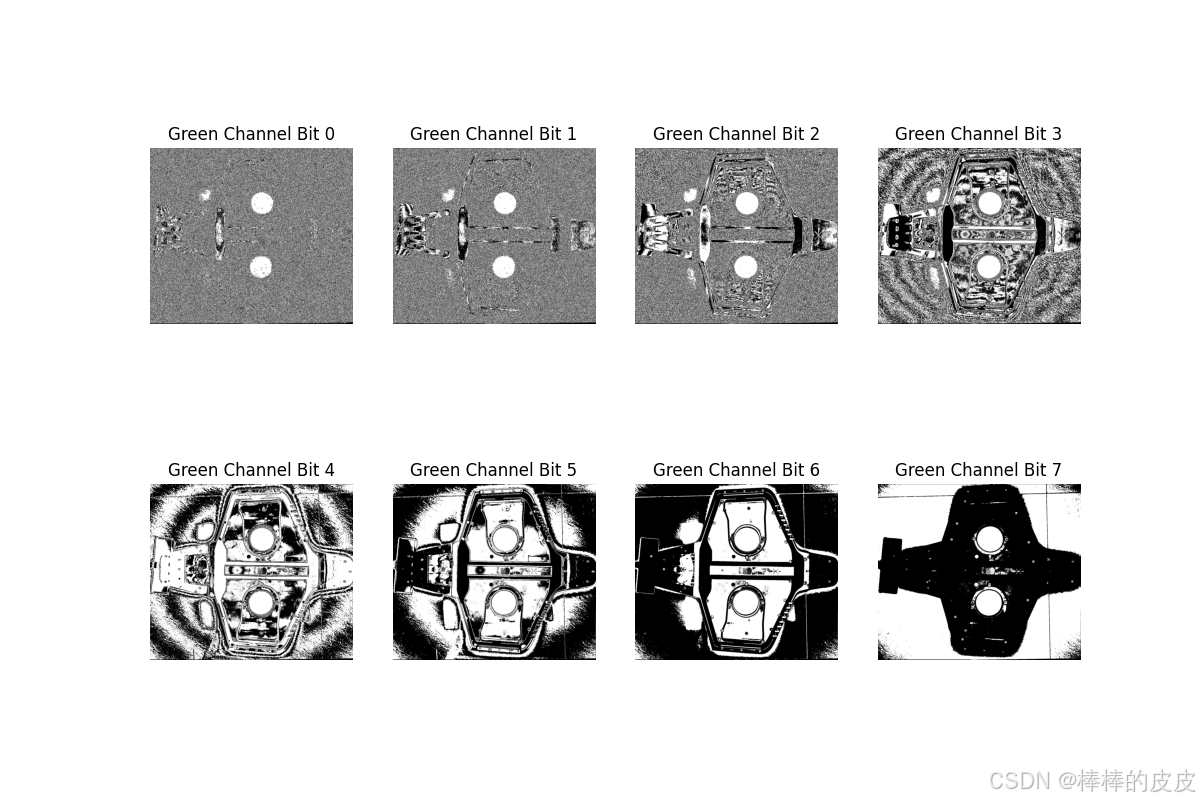
plt.show()2. 彩色图像的位平面分解
对彩色图像的每个通道分别分解位平面:
python
# 读取彩色图像(BGR格式)
img_color = cv2.imread('image.jpg')
b, g, r = cv2.split(img_color)
# 分解绿色通道的位平面(示例)
g_bit_planes = []
for n in range(8):
plane = (g >> n) & 1
plane = plane * 255
g_bit_planes.append(plane)
# 显示绿色通道的位平面
plt.figure(figsize=(12, 8))
for i in range(8):
plt.subplot(2, 4, i+1)
plt.imshow(g_bit_planes[i], cmap='gray')
plt.title(f'Green Channel Bit {i}')
plt.axis('off')
plt.show()效果图:
三、位平面重构
从提取的位平面恢复原始图像:
python
# 初始化重构图像
reconstructed = np.zeros_like(img, dtype=np.uint8)
# 合并位平面(可选择部分高位平面)
for n in range(4, 8): # 仅使用第4-7位平面
reconstructed += (bit_planes[n] // 255) << n
# 显示原始图像与重构图像
plt.subplot(121), plt.imshow(img, cmap='gray'), plt.title('Original')
plt.subplot(122), plt.imshow(reconstructed, cmap='gray'), plt.title('Reconstructed (Bits 4-7)')
plt.show()四、位平面的应用场景
1. 图像压缩
丢弃低位平面(如 0-3 位),仅保留高位平面(4-7 位),可实现无损或有损压缩:
python
# 仅保留高位平面(4-7位)
compressed = np.zeros_like(img)
for n in range(4, 8):
compressed += ((img >> n) & 1) << n
# 保存压缩图像
cv2.imwrite('compressed.jpg', compressed)2. 数字水印嵌入
将水印信息嵌入低位平面(人眼不易察觉):
python
# 读取水印图像(二值化)
watermark = cv2.imread('watermark.png', 0)
_, watermark = cv2.threshold(watermark, 127, 1, cv2.THRESH_BINARY)
watermark = cv2.resize(watermark, (width, height))
# 将水印嵌入最低位平面(第0位)
img_with_wm = img.copy()
img_with_wm = (img_with_wm & ~1) | watermark # 清空第0位,嵌入水印
# 提取水印
extracted_wm = img_with_wm & 1
extracted_wm = extracted_wm * 255
# 显示结果
plt.subplot(131), plt.imshow(img, cmap='gray'), plt.title('Original')
plt.subplot(132), plt.imshow(img_with_wm, cmap='gray'), plt.title('With Watermark')
plt.subplot(133), plt.imshow(extracted_wm, cmap='gray'), plt.title('Extracted Watermark')
plt.show()3. 图像噪声分析
低位平面(如 0-2 位)通常包含噪声,通过分析低位平面可评估图像噪声水平:
python
# 计算低位平面的方差(噪声指标)
noise_var = np.var(bit_planes[0]) # 第0位平面的方差
print(f'Noise Variance (Bit 0): {noise_var:.2f}')五、注意事项
- 数据类型 :分解时需确保图像为
uint8类型,避免移位运算溢出; - 显示处理:提取的位平面值为 0 或 1,需乘以 255 才能正常显示为黑白图像;
- 彩色图像处理:需对每个通道分别分解,再合并结果。
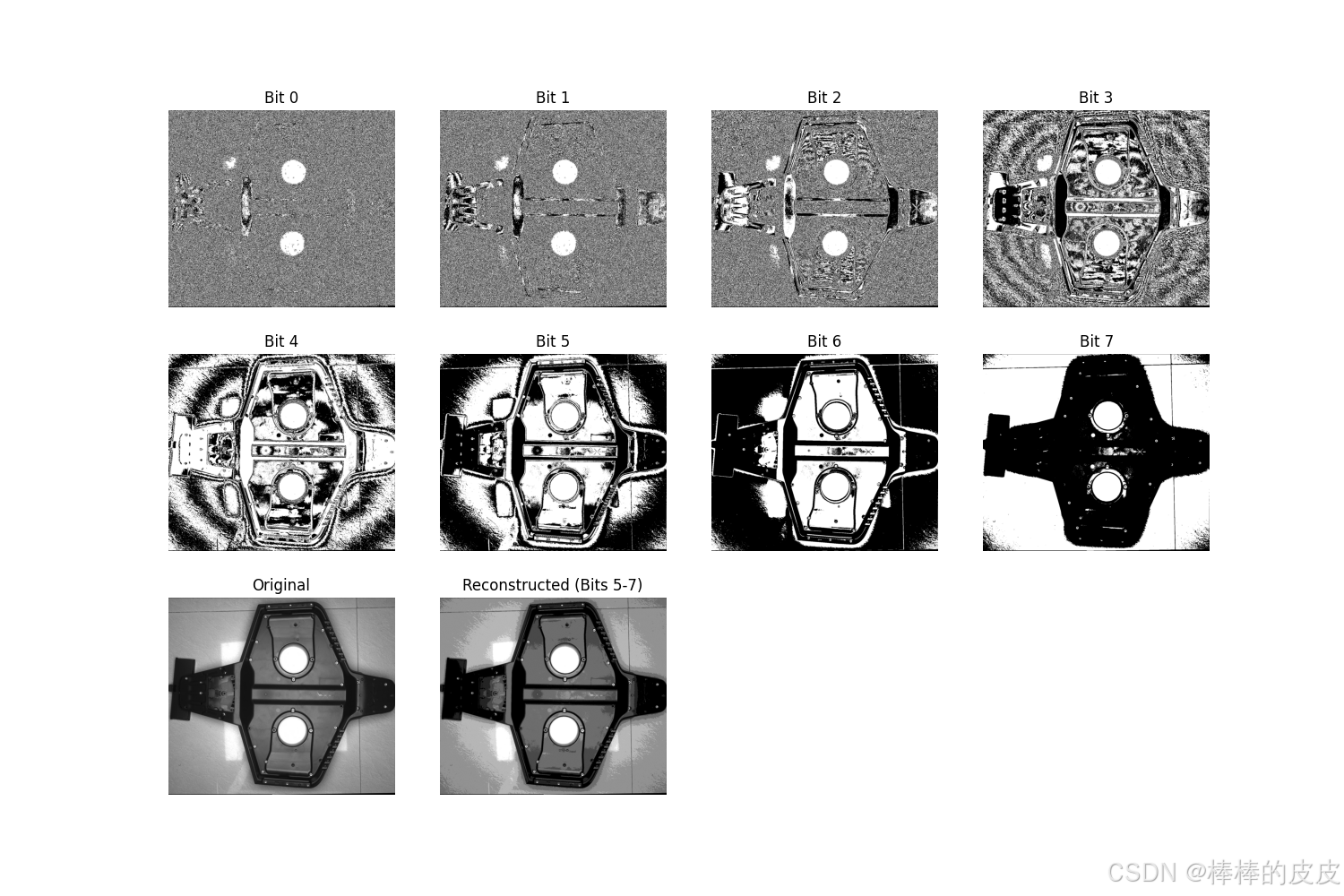
六、完整示例:位平面分解与重构
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 1. 读取图像
img = cv2.imread('lena.jpg', 0)
if img is None:
raise ValueError("图像读取失败!")
# 2. 分解位平面
bit_planes = []
for n in range(8):
plane = (img >> n) & 1
plane = plane * 255
bit_planes.append(plane)
# 3. 重构图像(保留高位平面)
reconstructed = np.zeros_like(img)
for n in range(5, 8): # 保留5-7位
reconstructed += (bit_planes[n] // 255) << n
# 4. 显示结果
plt.figure(figsize=(15, 10))
# 显示位平面
for i in range(8):
plt.subplot(3, 4, i+1)
plt.imshow(bit_planes[i], cmap='gray')
plt.title(f'Bit {i}')
plt.axis('off')
# 显示原始与重构图像
plt.subplot(3, 4, 9), plt.imshow(img, cmap='gray'), plt.title('Original'), plt.axis('off')
plt.subplot(3, 4, 10), plt.imshow(reconstructed, cmap='gray'), plt.title('Reconstructed (Bits 5-7)'), plt.axis('off')
plt.show()运行效果图:
总结
位平面分解通过拆分像素的二进制位,揭示图像的层次化信息:
- 高位平面:保留图像结构和主要特征;
- 低位平面:包含细节、噪声或可嵌入的隐藏信息;
- 应用:图像压缩、水印、噪声分析、特征提取等。
结合按位运算和 NumPy 操作,可高效实现位平面的分解与重构,是图像处理中分析图像信息的重要手段。