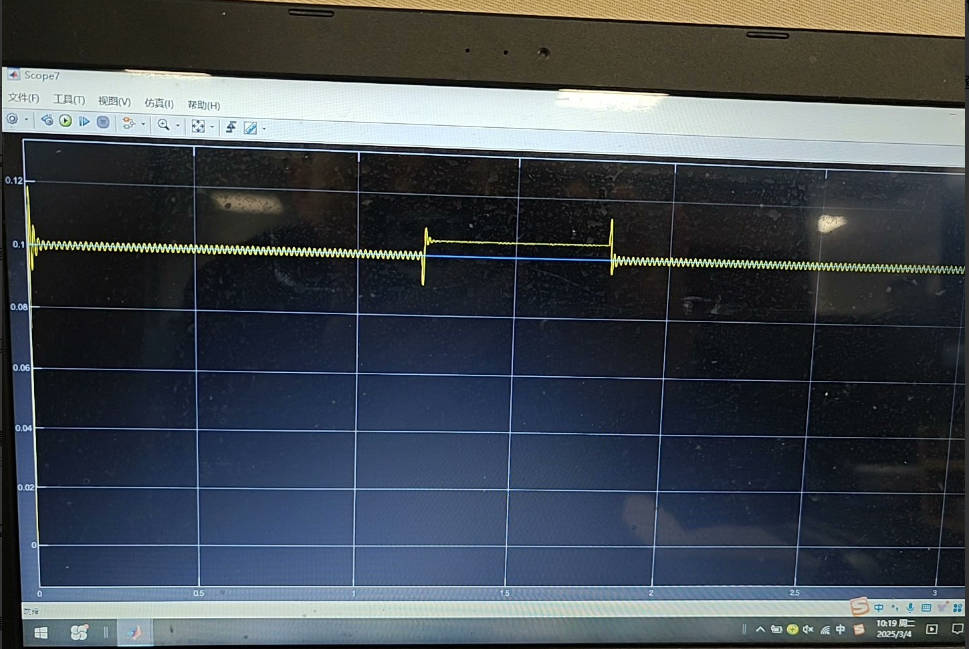
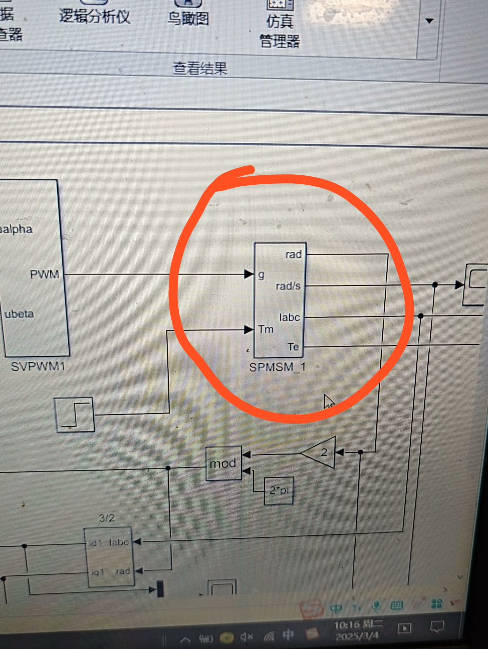
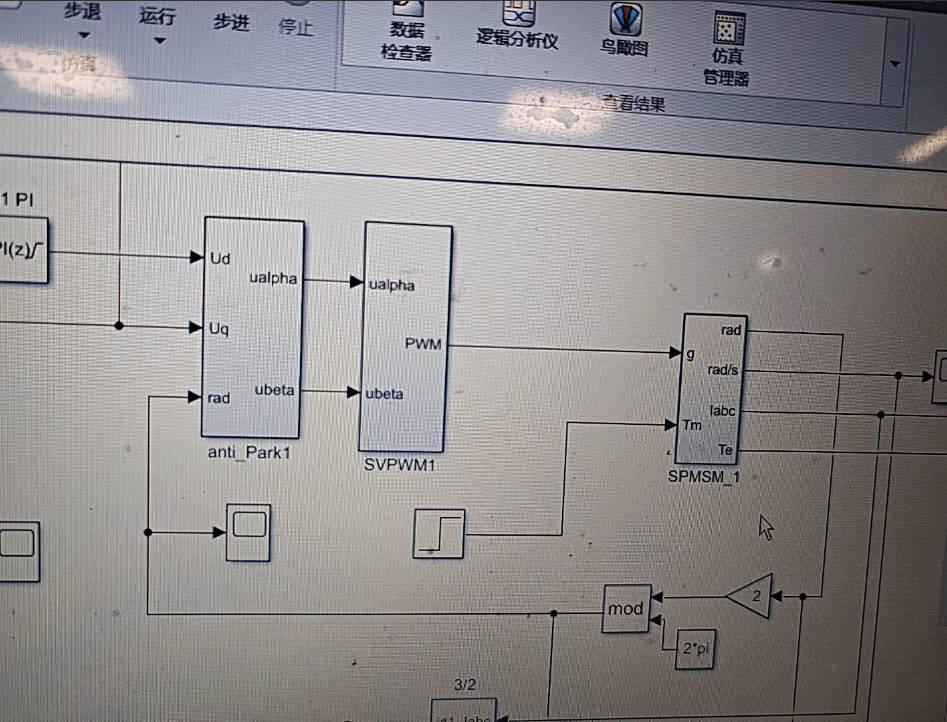
永磁同步电机PMSM三环位置速度电流伺服控制系统控制模型 线性自抗扰LADRC控制+电流转矩前馈 控制效果好,系统稳定 位置环LADRC 然后把位置环和速度环整合成一个环 所以整体是位置速度复合环+电流环 电流环用的PI 线性自抗扰+转矩前馈 中间那一段时间的波动是加入扰动的时间
一、引言
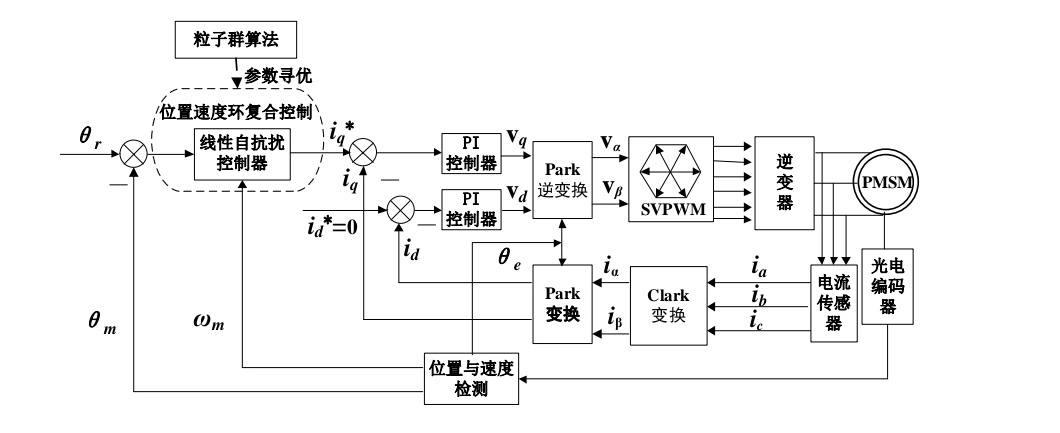
随着现代工业自动化和智能化的发展,永磁同步电机(PMSM)作为高效、节能的驱动装置,其控制系统的设计显得尤为重要。本文将详细介绍一种基于三环位置速度电流伺服控制系统的控制模型,采用线性自抗扰(LADRC)控制和电流转矩前馈控制方法,以提高系统的控制效果和稳定性。
二、控制模型概述
该控制模型主要包括位置环、速度环和电流环三个部分。其中,位置环和速度环采用LADRC控制,而电流环则采用PI(比例积分)控制。同时,引入电流转矩前馈控制,以进一步提高系统的动态响应和稳定性。
三、位置环LADRC控制
位置环采用线性自抗扰(LADRC)控制方法,通过实时调整控制参数,使系统能够快速、准确地响应位置指令。LADRC控制具有较好的抗干扰能力和鲁棒性,能够有效抑制系统中的扰动和不确定性因素。
四、速度环与位置环的整合
为了进一步提高系统的性能,将位置环和速度环整合成一个复合环。这样,系统可以同时考虑位置和速度的反馈信息,实现更精确的控制。整合后的复合环能够更好地适应系统的动态变化,提高系统的响应速度和稳定性。
五、电流环PI控制
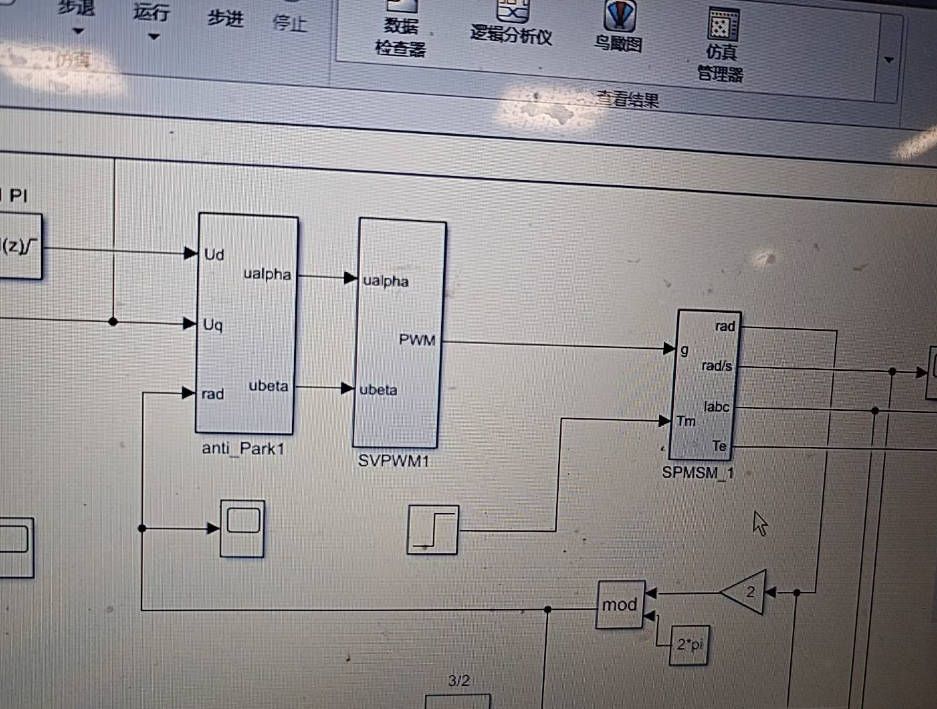
电流环采用PI控制方法,通过比例和积分两个环节的调节,实现对电流的精确控制。PI控制具有较好的稳态性能和动态性能,能够保证电流的快速跟踪和稳定输出。同时,引入电流转矩前馈控制,进一步提高电流控制的准确性和响应速度。
六、扰动处理与系统稳定
在系统运行过程中,可能会遇到一些扰动因素,导致系统出现一段时间的波动。为了抑制这些扰动对系统的影响,我们采用了线性自抗扰控制方法。通过实时调整控制参数,使系统能够在扰动发生时快速恢复稳定状态。此外,通过合理设计控制系统结构和参数,确保整个系统的稳定性。
七、结论
本文介绍了一种基于永磁同步电机PMSM的三环位置速度电流伺服控制系统的控制模型。通过采用线性自抗扰LADRC控制和电流转矩前馈控制方法,提高了系统的控制效果和稳定性。同时,将位置环和速度环整合成一个复合环,进一步提高了系统的响应速度和准确性。在扰动处理方面,通过实时调整控制参数和合理设计控制系统结构,确保了整个系统的稳定性。该控制模型为永磁同步电机的控制和应用提供了有力的支持。