概述
在数字孪生项目尤其是工厂场景中,三维视角漫游是一种常见的交互需求。鲸孪生支持添加机器人第三人称相机,还能通过键盘控制机器人的移动、跳跃。下面我们就为大家介绍一下,如何设置机器人第三人称相机。
添加机器人第三人称相机
首先,创建一个工厂场景项目。
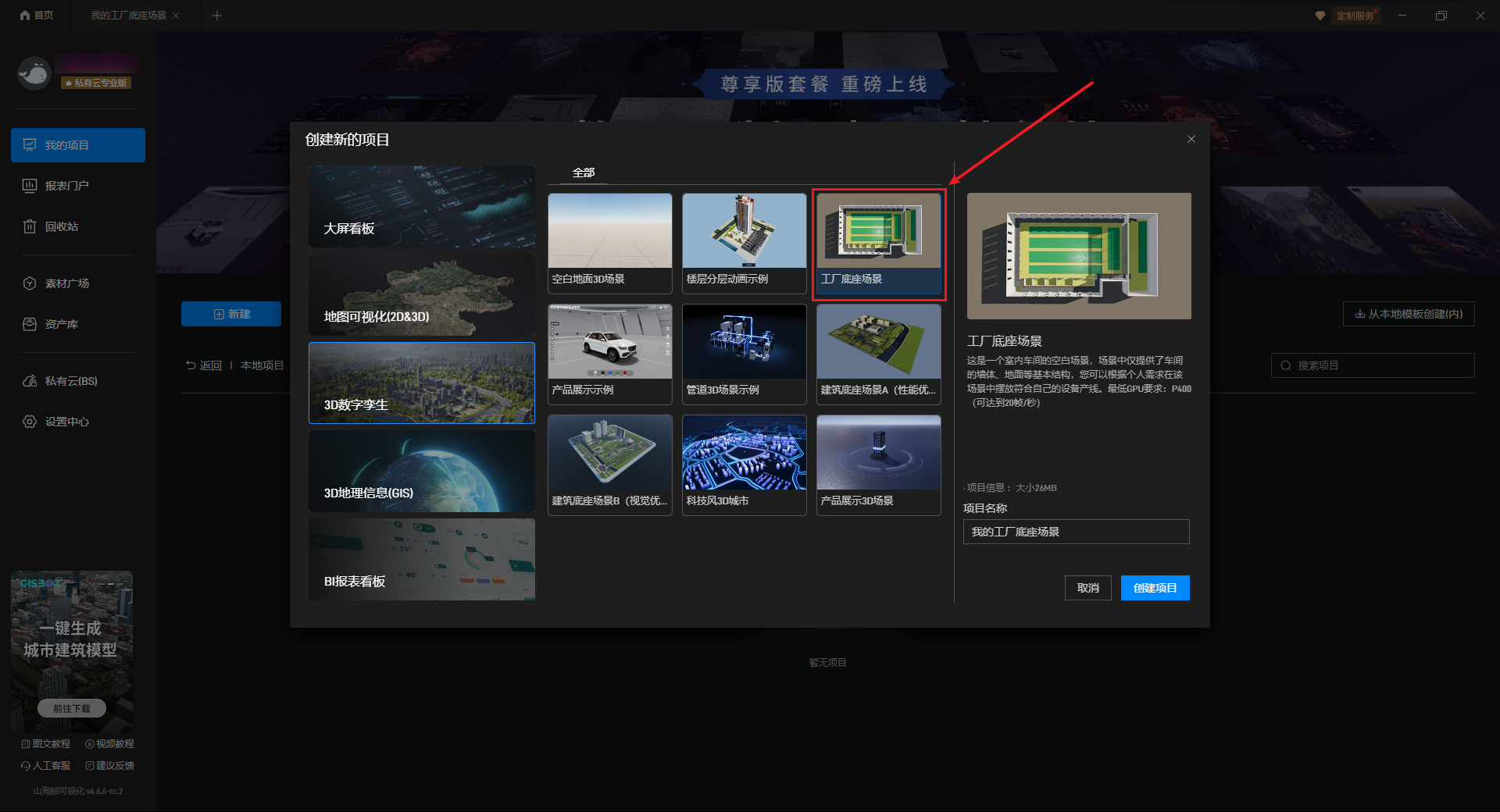
双击进入编辑模式,在模型库中选择**"相机-机器人"**。
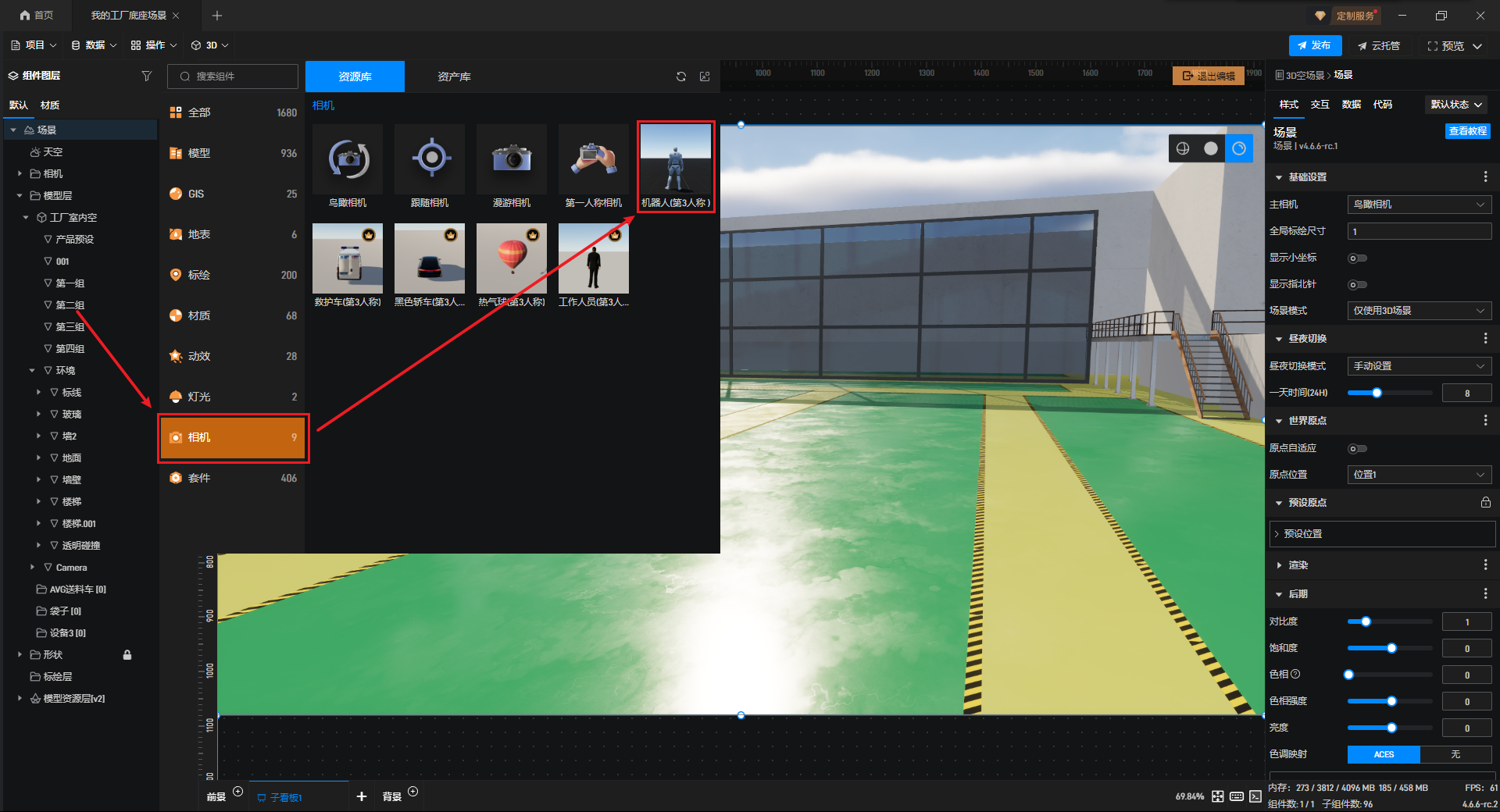
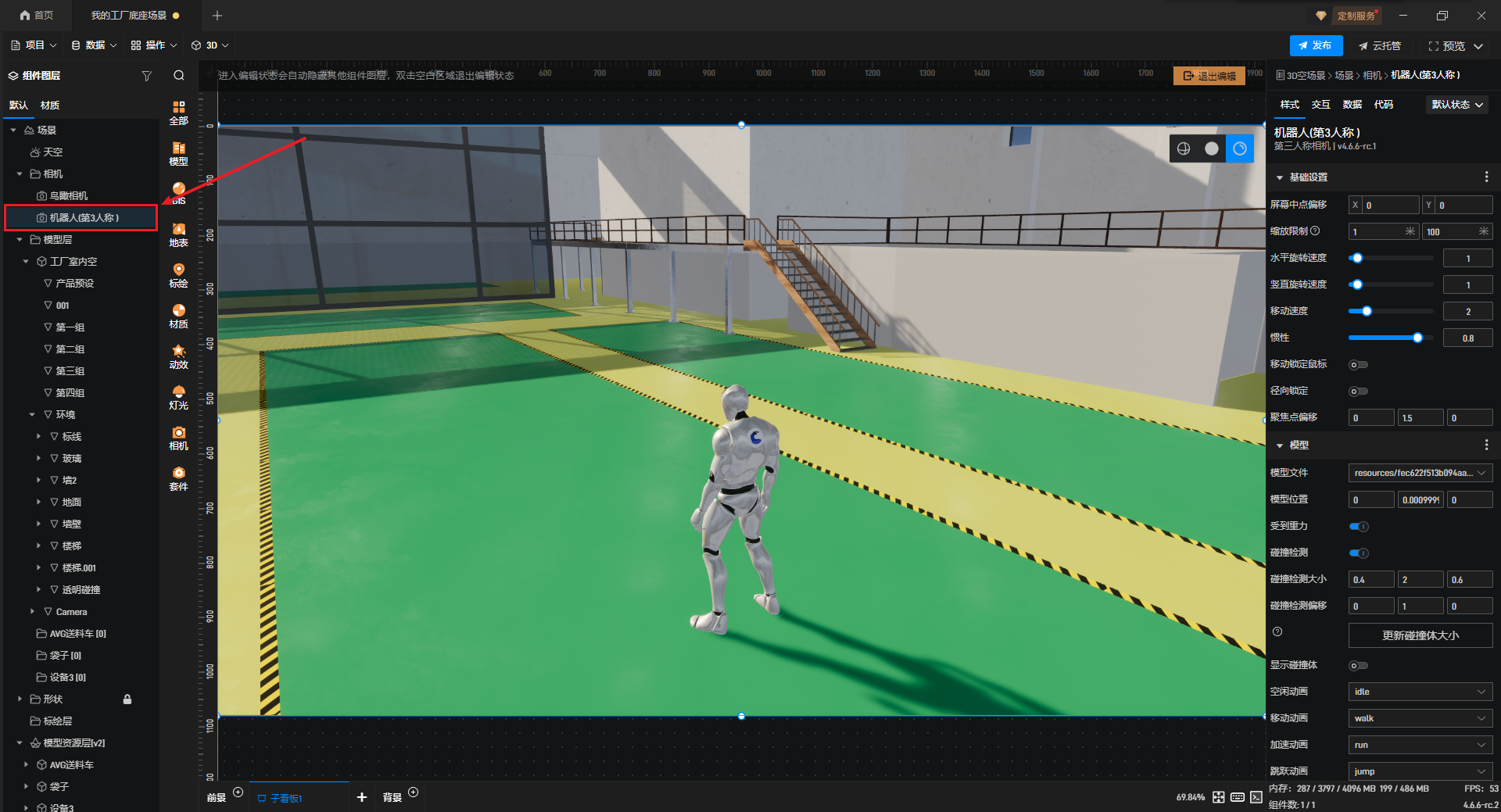
点击后场景中会出现一个相机视角,左侧图层中也会添加一个机器人相机。
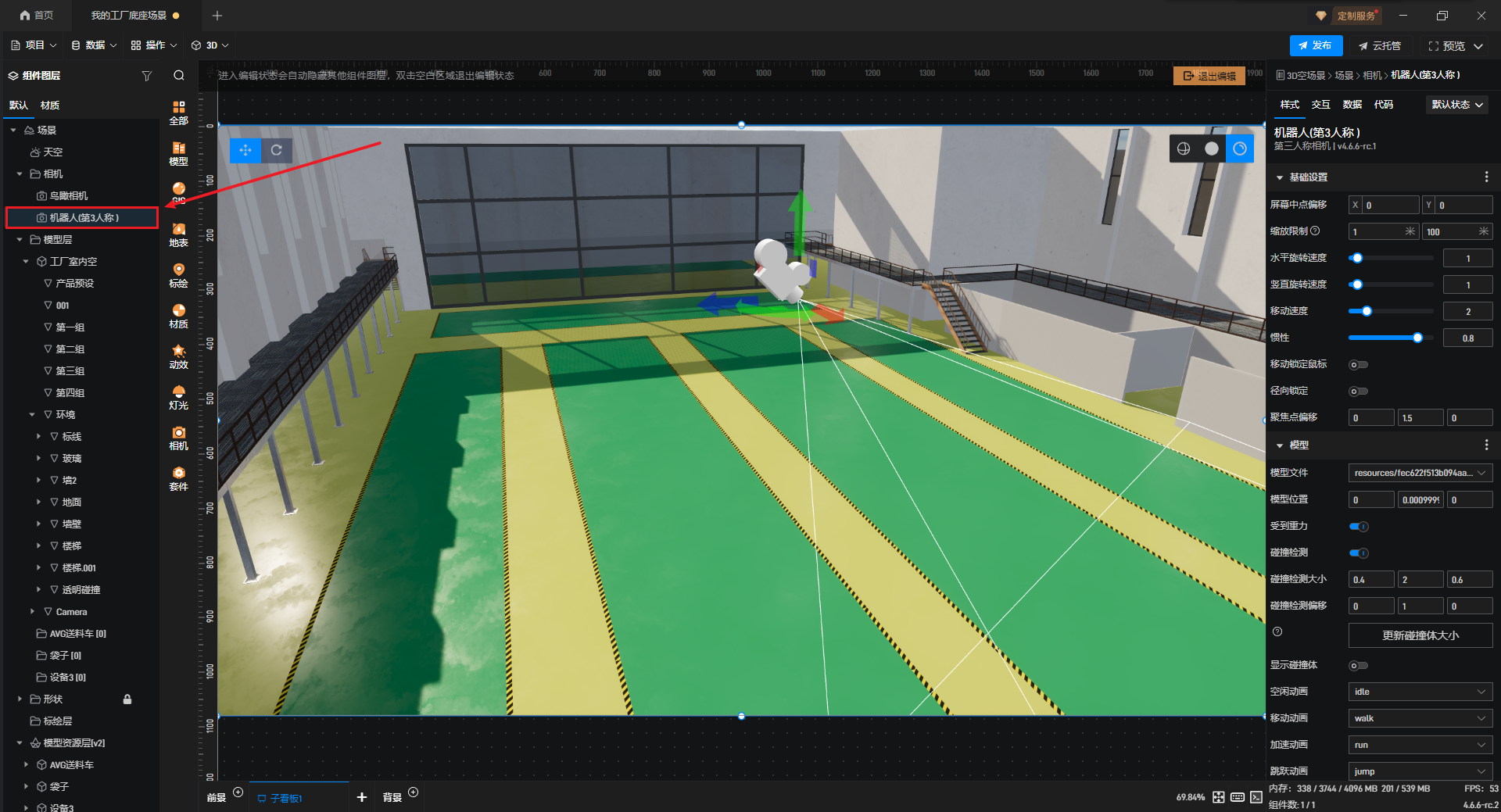
双击机器人相机图层即可查看机器人第三人称视角。
机器人第三人称相机设置
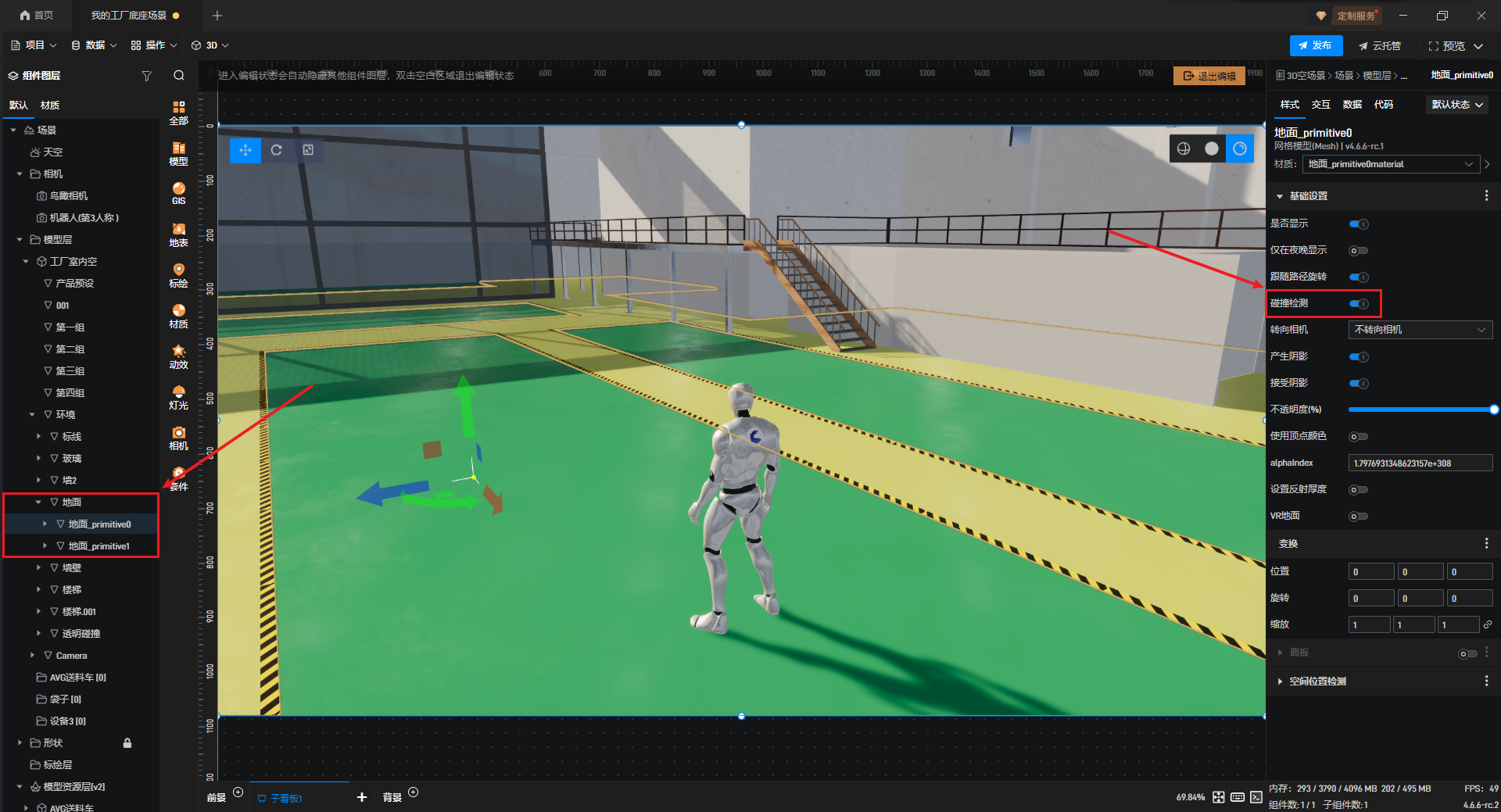
首先为地面开启**"碰撞检测"**,否则模型会穿透下落。
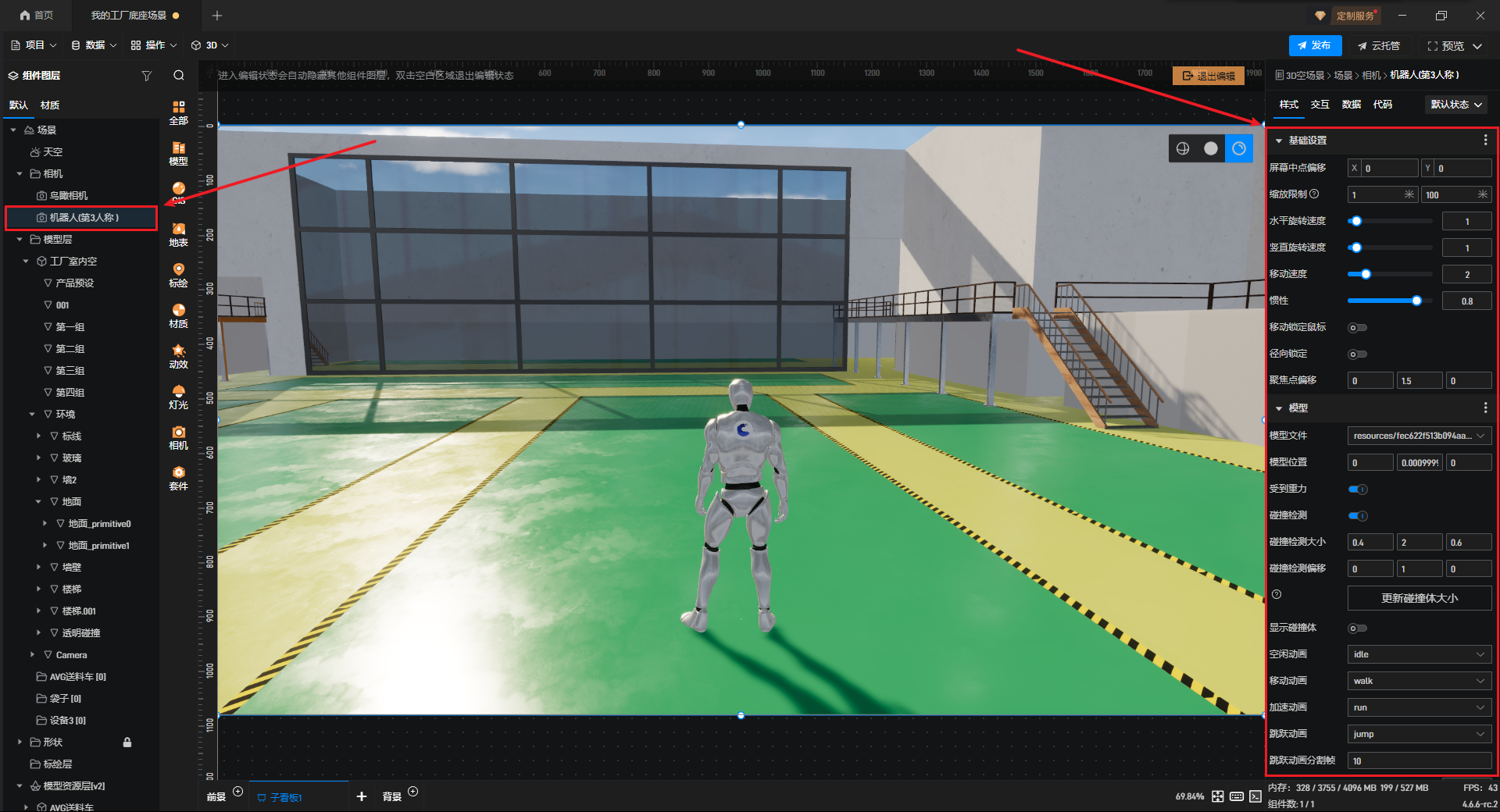
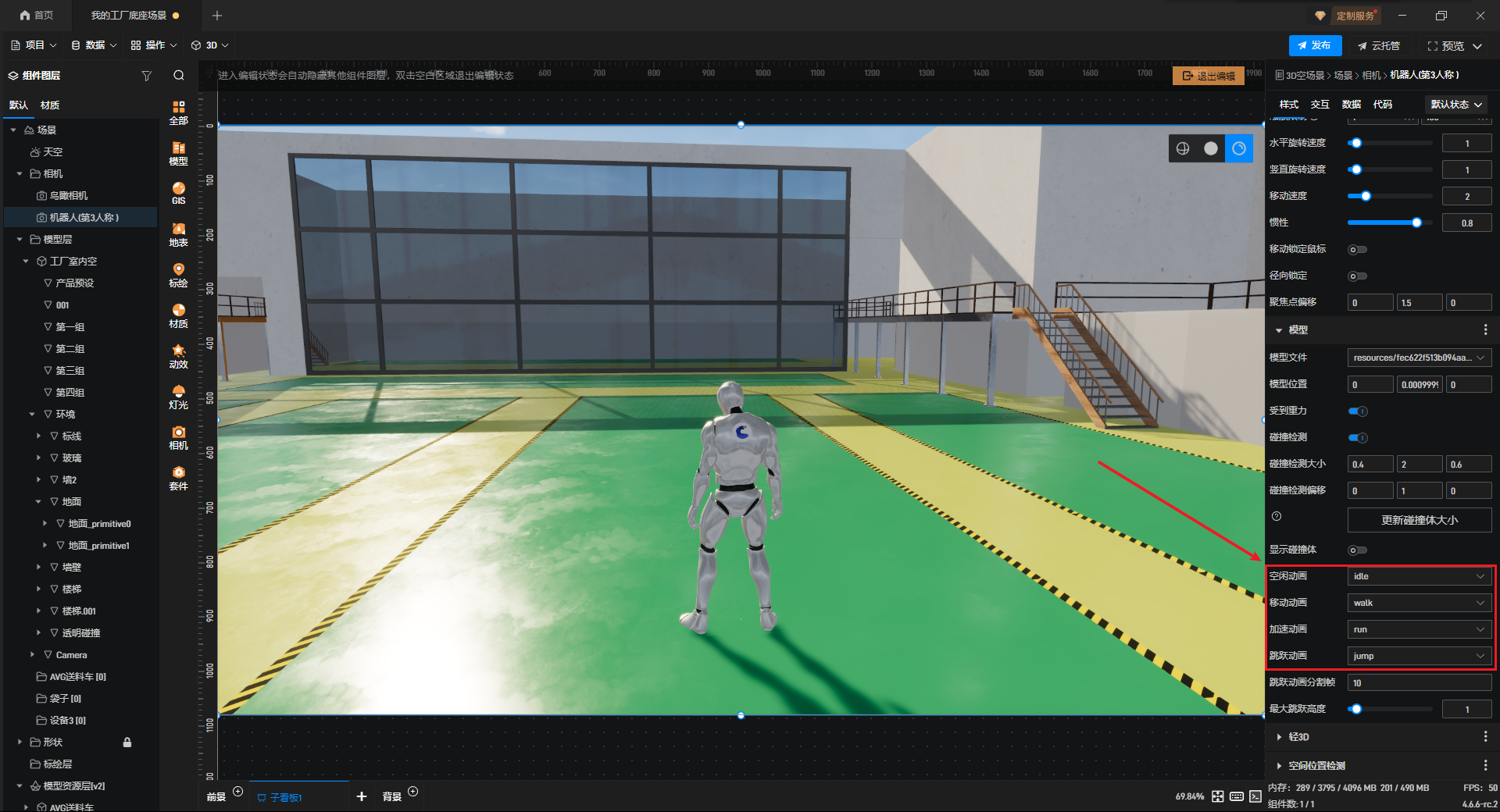
选中机器人相机图层后,可在右侧**"样式"**中设置。
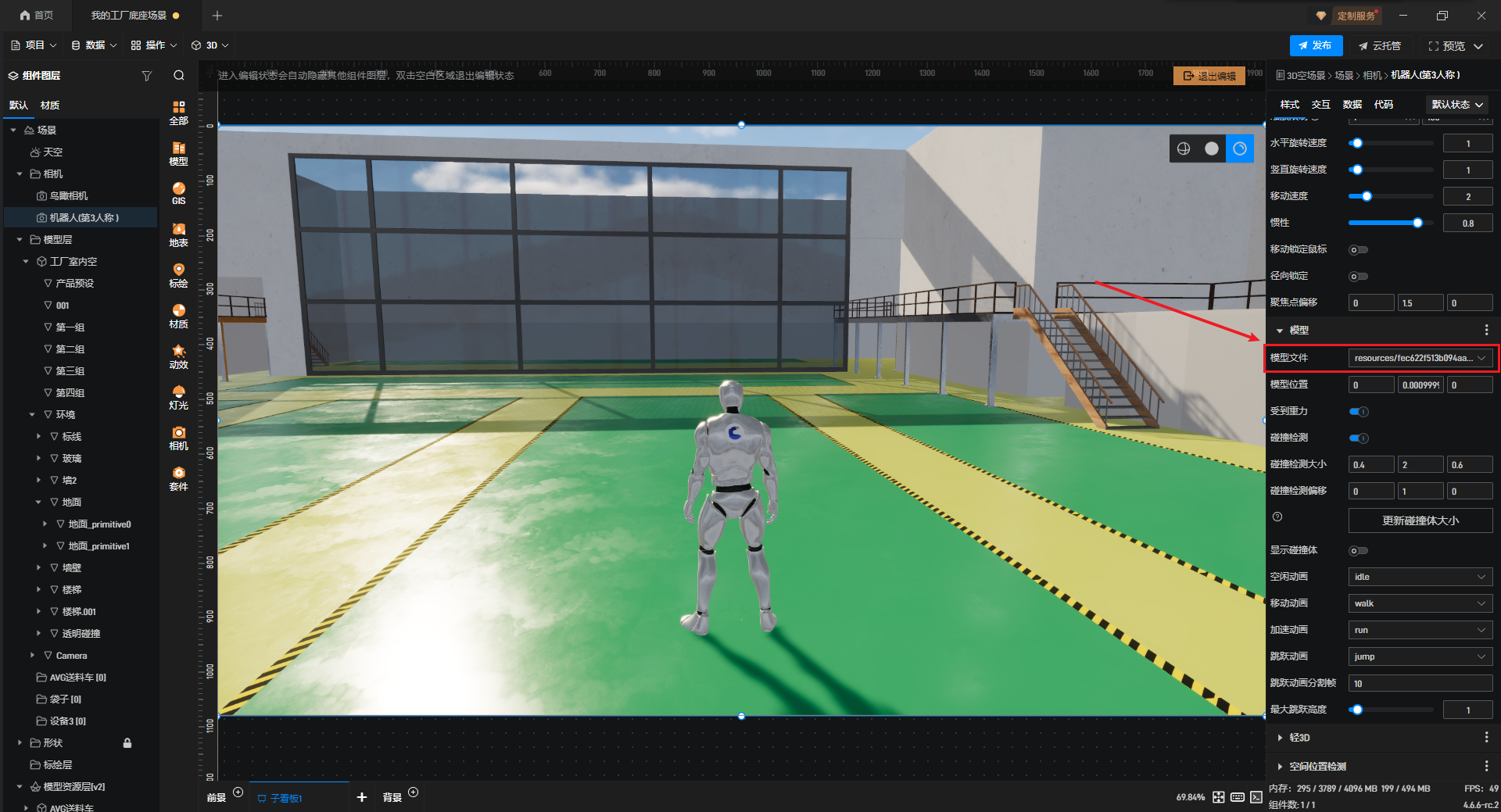
可在**"模型文件"**处添加自定义模型替代机器人模型。
此外,我们也需要制作并添加配套的模型动画,包括空闲、移动、加速、跳跃和跳跃动画分割帧。
控制机器人第三人称相机
我们可以通过W、A、S、D方向键控制机器人前后左右移动。
按住shift键加方向键可以控制机器人加速移动。
按空格键可以控制机器人跳跃。