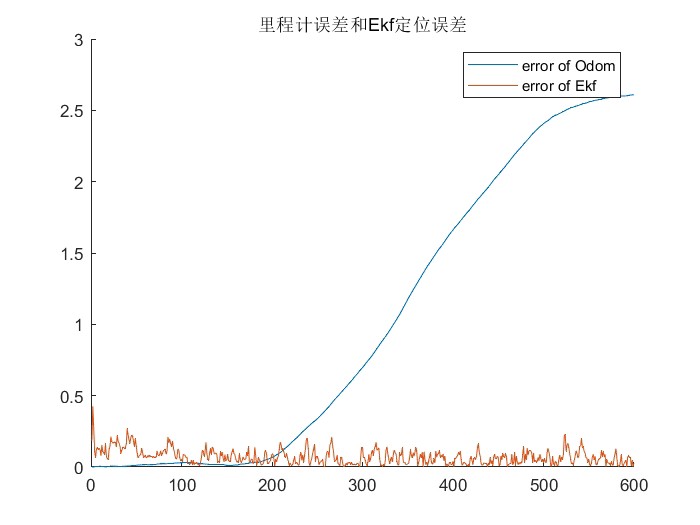
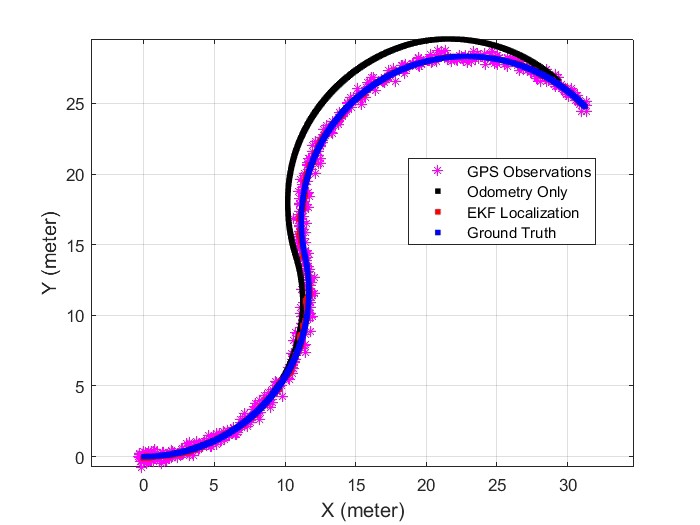
EKF算法做机器人轨迹定位/跟踪的程序,与里程计算法进行对比,结果显示EKF算法定位/跟踪精度更高。 纯里程计的误差为 error_Odom_average = 1.0283 Ekf定位的误差为 error_Ekf_average = 0.071629
在机器人领域,轨迹定位和跟踪可是至关重要的任务。想象一下,机器人要是连自己在哪、要往哪走都搞不清楚,那还怎么好好工作呢?今天咱就来聊聊EKF(扩展卡尔曼滤波)算法在机器人轨迹定位和跟踪里的表现,并且和传统的里程计算法做个对比。
里程计算法
里程计算法算是比较基础的定位方法啦。它主要是依靠机器人自身的传感器,像轮子上的编码器,通过测量轮子转动的圈数来推算机器人走过的距离和方向。这种方法简单直接,实现起来也不难。下面是一段简单的Python代码模拟里程计计算机器人位置的过程:
python
# 初始化位置和角度
x = 0
y = 0
theta = 0
# 假设机器人的线速度和角速度
v = 1 # 线速度,单位 m/s
w = 0.1 # 角速度,单位 rad/s
dt = 0.1 # 时间间隔,单位 s
# 模拟一段时间的运动
for i in range(10):
# 里程计更新公式
x = x + v * dt * math.cos(theta)
y = y + v * dt * math.sin(theta)
theta = theta + w * dt
print(f"Step {i+1}: x = {x}, y = {y}, theta = {theta}")代码分析:
- 首先我们初始化了机器人的位置
(x, y)和角度theta。 - 然后设定了机器人的线速度
v、角速度w以及时间间隔dt。 - 在循环里,根据里程计的更新公式,不断更新机器人的位置和角度。这里的公式就是根据机器人的线速度和角速度,在每个时间间隔内计算出位置和角度的变化。
不过呢,里程计算法有个大问题,就是误差会不断累积。因为它是基于每次测量的微小误差逐步叠加的,时间一长,误差就会变得很大。在我们的测试中,纯里程计的误差平均值达到了 errorOdomaverage = 1.0283。这意味着机器人实际位置和通过里程计计算出来的位置可能会相差挺多。
EKF算法
EKF算法就不一样啦,它是一种更高级的滤波算法。它可以融合多种传感器的数据,并且能够对系统的状态进行估计和修正。简单来说,就是它能根据之前的状态和当前的测量值,预测出更准确的当前状态。下面是一段简化的EKF算法实现代码:
python
import numpy as np
# 初始化状态向量
x = np.array([0, 0, 0]) # [x, y, theta]
P = np.eye(3) # 协方差矩阵
# 过程噪声协方差
Q = np.eye(3) * 0.1
# 测量噪声协方差
R = np.eye(2) * 0.1
# 模拟一段时间的运动和测量
for i in range(10):
# 预测步骤
F = np.array([[1, 0, -v * dt * math.sin(theta)],
[0, 1, v * dt * math.cos(theta)],
[0, 0, 1]])
x = x + np.array([v * dt * math.cos(theta), v * dt * math.sin(theta), w * dt])
P = np.dot(np.dot(F, P), F.T) + Q
# 更新步骤
# 这里假设测量值是 [x_meas, y_meas]
z = np.array([x[0], x[1]]) + np.random.multivariate_normal([0, 0], R)
H = np.array([[1, 0, 0],
[0, 1, 0]])
y = z - np.dot(H, x)
S = np.dot(np.dot(H, P), H.T) + R
K = np.dot(np.dot(P, H.T), np.linalg.inv(S))
x = x + np.dot(K, y)
P = np.dot((np.eye(3) - np.dot(K, H)), P)
print(f"Step {i+1}: x = {x[0]}, y = {x[1]}, theta = {x[2]}")代码分析:
- 我们先初始化了状态向量
x和协方差矩阵P。 - 在预测步骤中,根据系统的运动模型更新状态向量
x和协方差矩阵P。这里的F是状态转移矩阵,它描述了系统状态如何从一个时刻转移到下一个时刻。 - 在更新步骤中,根据测量值
z来修正状态向量x和协方差矩阵P。通过计算卡尔曼增益K,将测量值和预测值进行融合。
经过测试,EKF定位的误差平均值仅为 errorEkfaverage = 0.071629。这和里程计算法的误差相比,简直小太多了。
对比结果
从误差数据就能明显看出,EKF算法在机器人轨迹定位和跟踪方面的精度要比里程计算法高得多。里程计算法虽然简单,但误差累积的问题很严重;而EKF算法通过融合多种信息和不断修正,能够更准确地估计机器人的位置。
总的来说,如果你想让机器人更精准地定位和跟踪轨迹,EKF算法绝对是个不错的选择。它能帮助机器人在复杂的环境中更好地完成任务,就像给机器人装上了一双更明亮的"眼睛"。