镜头畸变矫正 (LDC) 技术指南
文章目录
- 镜头畸变矫正 (LDC) 技术指南
-
-
- 技术原理
-
- 1.1 镜头畸变的主要类型
-
- 1.1.1 桶形畸变 (Barrel Distortion)
- 1.1.2 枕形畸变 (Pincushion Distortion)
- 1.1.3 须状畸变 (Mustache Distortion)
- 1.2 数学建模
-
- 1.2.1 Brown-Conrady 模型 (普通镜头)
- 1.2.2 Kannala-Brandt 模型 (鱼眼镜头)
-
- 实现方法
-
- 2.1 标定流程详解
- 2.2 核心代码实现
- 2.3 获取相机内参和畸变系数
-
- 矫正效果展示
-
- 常见问题与注意事项
-
- 总结
-
1. 技术原理
镜头畸变(Lens Distortion)是光学成像系统中常见的几何失真现象,主要由透镜表面的曲率和光线通过透镜时的折射不均匀引起。在计算机视觉和摄影测量中,准确的畸变模型是实现高精度测量和图像还原的基础。
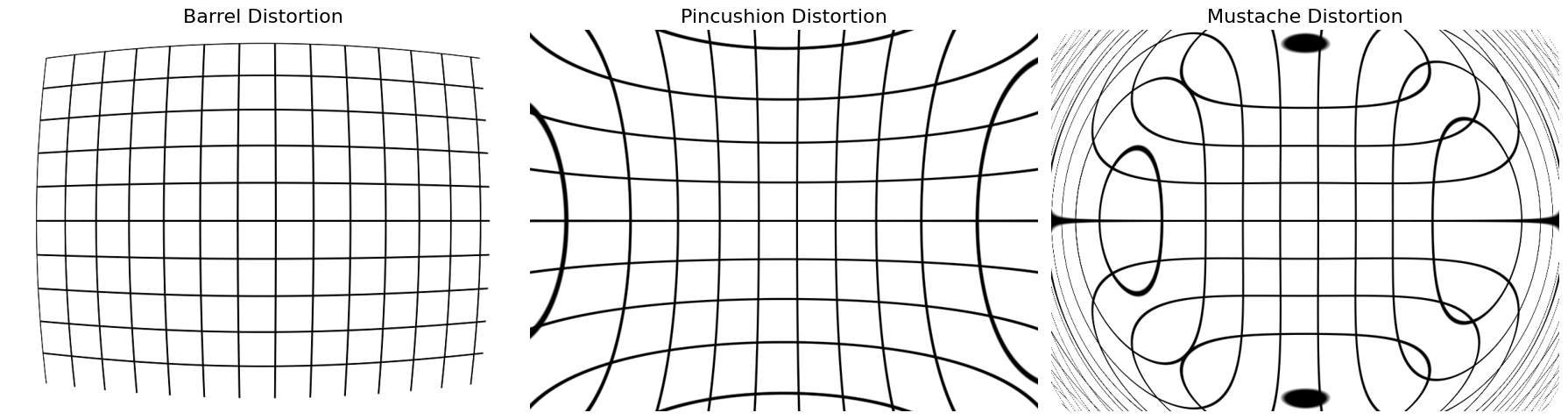
1.1 镜头畸变的主要类型
镜头畸变主要分为径向畸变(Radial Distortion)和切向畸变(Tangential Distortion)。其中径向畸变最为常见,表现为图像点沿着径向方向发生偏移。
1.1.1 桶形畸变 (Barrel Distortion)
- 特征:图像放大率随着与光轴距离的增加而减小。
- 表现:正方形物体成像后呈现出边线向外弯曲的"桶状"。
- 成因:常见于广角镜头,视场角越大,畸变越明显。
- 数学描述 :畸变系数 k1<0k_1 < 0k1<0。
1.1.2 枕形畸变 (Pincushion Distortion)
- 特征:图像放大率随着与光轴距离的增加而增加。
- 表现:正方形物体成像后呈现出边线向内凹陷的"枕状"。
- 成因:常见于长焦镜头。
- 数学描述 :畸变系数 k1>0k_1 > 0k1>0。
1.1.3 须状畸变 (Mustache Distortion)
- 特征:桶形畸变和枕形畸变的混合体。
- 表现:图像中心表现为桶形畸变,而边缘表现为枕形畸变(或反之),线条呈现波浪状。
- 成因:复杂的光学透镜组设计中可能出现。
1.2 数学建模
在计算机视觉库(如 OpenCV)中,通常使用 Brown-Conrady 模型 来描述普通镜头的畸变,而对于超广角或鱼眼镜头,则使用 Kannala-Brandt 模型。
1.2.1 Brown-Conrady 模型 (普通镜头)
该模型结合了径向畸变和切向畸变。
假设未畸变的理想归一化图像坐标为 (x,y)(x, y)(x,y),距离光轴中心的半径 r=x2+y2r = \sqrt{x^2 + y^2}r=x2+y2 。
径向畸变公式:
xdistorted=x(1+k1r2+k2r4+k3r6) x_{distorted} = x (1 + k_1 r^2 + k_2 r^4 + k_3 r^6) xdistorted=x(1+k1r2+k2r4+k3r6)
ydistorted=y(1+k1r2+k2r4+k3r6) y_{distorted} = y (1 + k_1 r^2 + k_2 r^4 + k_3 r^6) ydistorted=y(1+k1r2+k2r4+k3r6)
切向畸变公式:
(由透镜与成像平面不平行引起)
xtangential=x+2p1xy+p2(r2+2x2) x_{tangential} = x + 2p_1xy + p_2(r\^2 + 2x\^2) xtangential=x+2p1xy+p2(r2+2x2)
ytangential=y+p1(r2+2y2)+2p2xy y_{tangential} = y + p_1(r\^2 + 2y\^2) + 2p_2xy ytangential=y+p1(r2+2y2)+2p2xy
综合畸变模型:
最终的畸变坐标 (x′,y′)(x', y')(x′,y′) 为两者之和。
- k1,k2,k3k_1, k_2, k_3k1,k2,k3 :径向畸变系数。k1k_1k1 起主导作用,正负决定了畸变方向(桶形或枕形)。
- p1,p2p_1, p_2p1,p2:切向畸变系数。通常数值很小,但在高精度装配误差分析中不可忽略。
1.2.2 Kannala-Brandt 模型 (鱼眼镜头)
对于鱼眼镜头,传统的 Brown 模型不再适用,因为它假设 rrr 较小时成立,而鱼眼镜头的入射角 θ\thetaθ 很大。Kannala-Brandt 模型基于入射角 θ\thetaθ 进行建模。
假设入射角为 θ\thetaθ,畸变后的径向距离 rdr_drd 为:
rd(θ)=k1θ+k2θ3+k3θ5+k4θ7 r_d(\theta) = k_1 \theta + k_2 \theta^3 + k_3 \theta^5 + k_4 \theta^7 rd(θ)=k1θ+k2θ3+k3θ5+k4θ7
OpenCV 的 cv2.fisheye 模块即采用了此模型。
2. 实现方法
基于 OpenCV 的畸变矫正流程通常包含三个步骤:标定数据采集 、相机内参计算 、图像矫正。
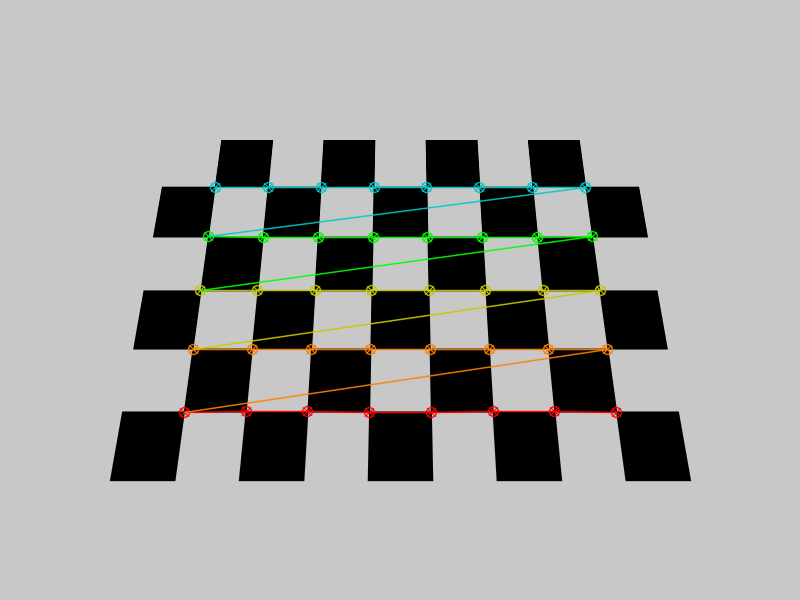
2.1 标定流程详解
- 准备标定板:通常使用棋盘格(Chessboard),因为角点特征明显,易于检测。
- 多角度拍摄:采集 15-20 张不同角度、距离、方位的标定板图片。
- 提取角点 :使用
cv2.findChessboardCorners自动查找内角点。 - 相机标定 :使用
cv2.calibrateCamera计算内参矩阵和畸变系数。
2.2 核心代码实现
以下是一个完整的 Python 示例,演示如何从标定到矫正的全过程。
python
import numpy as np
import cv2
import glob
def calibrate_and_undistort(image_folder, pattern_size=(9, 6), square_size=1.0):
"""
相机标定与畸变矫正函数
:param image_folder: 标定图片文件夹路径
:param pattern_size: 棋盘格内角点数目 (columns, rows)
:param square_size: 棋盘格方块的物理尺寸 (例如 20mm)
"""
# 1. 准备物体坐标 (0,0,0), (1,0,0), (2,0,0) ....,(8,5,0)
objp = np.zeros((pattern_size[0] * pattern_size[1], 3), np.float32)
objp[:, :2] = np.mgrid[0:pattern_size[0], 0:pattern_size[1]].T.reshape(-1, 2)
objp = objp * square_size
# 存储所有图像的物体点和图像点
objpoints = [] # 3D points in real world space
imgpoints = [] # 2D points in image plane
images = glob.glob(f'{image_folder}/*.jpg')
if not images:
print("未找到标定图片,请检查路径。")
return
img_shape = None
# 2. 检测角点
for fname in images:
img = cv2.imread(fname)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
img_shape = gray.shape[::-1]
# 寻找棋盘格角点
ret, corners = cv2.findChessboardCorners(gray, pattern_size, None)
if ret:
objpoints.append(objp)
# 亚像素级角点优化
corners2 = cv2.cornerSubPix(gray, corners, (11,11), (-1,-1),
(cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001))
imgpoints.append(corners2)
# 可视化(可选)
# cv2.drawChessboardCorners(img, pattern_size, corners2, ret)
# cv2.imshow('img', img)
# cv2.waitKey(100)
cv2.destroyAllWindows()
# 3. 相机标定
# ret: 重投影误差
# mtx: 相机内参矩阵
# dist: 畸变系数 (k1, k2, p1, p2, k3)
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, img_shape, None, None)
print(f"标定完成!重投影误差: {ret:.4f}")
print("相机内参矩阵:\n", mtx)
print("畸变系数:\n", dist)
# 4. 畸变矫正测试
img = cv2.imread(images[0])
h, w = img.shape[:2]
# 优化新的相机内参矩阵(保留更多图像信息)
newcameramtx, roi = cv2.getOptimalNewCameraMatrix(mtx, dist, (w,h), 1, (w,h))
# 方法一:使用 undistort
dst = cv2.undistort(img, mtx, dist, None, newcameramtx)
# 裁剪掉黑色边框(可选)
x, y, w, h = roi
dst = dst[y:y+h, x:x+w]
cv2.imwrite('calibresult.png', dst)
print("矫正图像已保存为 calibresult.png")
return mtx, dist
# 使用示例 (假设当前目录下有 calibration_images 文件夹)
# mtx, dist = calibrate_and_undistort('./calibration_images')2.3 获取相机内参和畸变系数
通过上述 cv2.calibrateCamera 函数,我们可以得到两个核心结果:
-
相机矩阵 (
mtx) :
A=fx0cx0fycy001 A = \begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix} A=⎣⎡fx000fy0cxcy1⎦⎤其中 fx,fyf_x, f_yfx,fy 为焦距(像素单位),cx,cyc_x, c_ycx,cy 为主点坐标(光心在图像上的投影)。
-
畸变系数 (
dist) :返回一个 1x5 的向量
(k1, k2, p1, p2, k3)。- 如果使用的是
fisheye模块,返回的是 1x4 的向量(k1, k2, k3, k4)。
- 如果使用的是
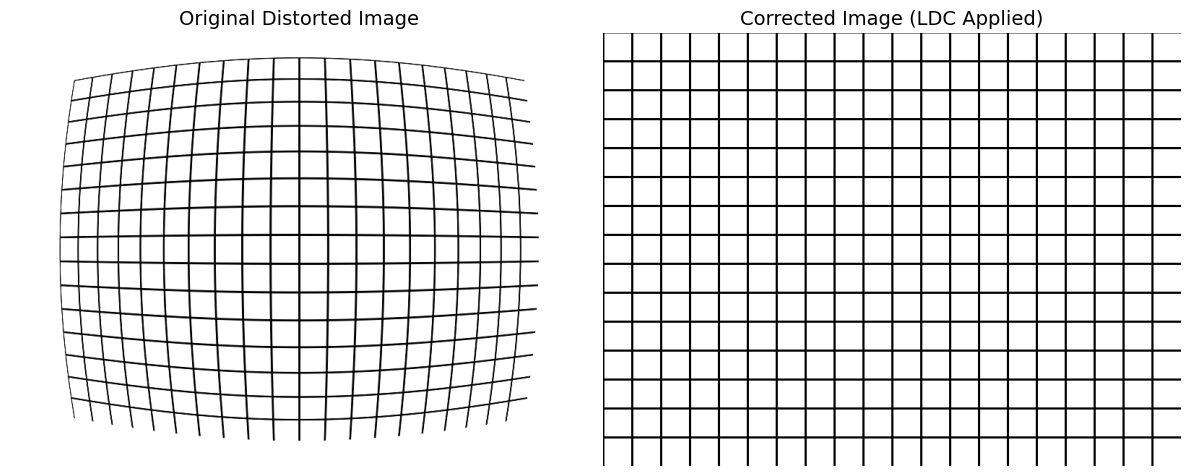
3. 矫正效果展示
下图展示了强畸变图像经过标定参数矫正后的效果。可以看到,原本弯曲的网格线被拉直,恢复了真实的几何结构。
4. 常见问题与注意事项
- 标定板质量:标定板必须保持平整,打印精度直接影响标定结果。建议将打印纸粘贴在硬纸板或亚克力板上。
- 光照条件:拍摄时避免反光和过暗,保证角点清晰可见。
- 角点覆盖:拍摄时应让标定板覆盖画面的各个角落(边缘、中心、远近),以准确计算全图的畸变参数。
- 鱼眼矫正 :对于视场角超过 160 度的鱼眼镜头,务必使用
cv2.fisheye模块,普通模型无法收敛。
5. 总结
镜头畸变矫正(LDC)是机器视觉系统中的重要预处理步骤。通过理解畸变产生的物理原理(径向与切向),利用数学模型(Brown-Conrady 或 Kannala-Brandt)进行参数化描述,并借助 OpenCV 强大的标定工具,我们可以高效地消除图像失真,为后续的目标检测、SLAM 或 3D 重建提供准确的几何输入。