告别"被动救火":POLARIS让系统学会"主动预判+自我进化"
论文信息
- 论文原标题:POLARIS: Is Multi-Agentic Reasoning the Next Wave in Engineering Self-Adaptive Systems?
- 主要作者及研究机构:Divyansh Pandey、Vyakhya Gupta、Prakhar Singhal、Karthik Vaidhyanathan(印度国际信息技术学院海德拉巴分校,IIIT - Hyderabad)
- 引文格式(GB/T 7714):Pandey D, Gupta V, Singhal P, et al. POLARIS: Is Multi-Agentic Reasoning the Next Wave in Engineering Self-Adaptive SystemsEB/OL. arXiv:2512.04702v1 cs.SE, 2025-12-04.
- 开源代码地址:https://github.com/prakhar479/POLARIS
研究背景
你有没有遇到过这样的情况:手机APP突然卡顿,因为并发用户太多,服务器没及时扩容;AI图像识别工具有时快有时慢,因为模型切换太频繁还容易出错?这些都是"自适应系统"要解决的问题------让系统在动态环境中自动调整状态,保持稳定运行。
但自适应系统也在"打怪升级":
- 1.0时代(传统系统):像"消防员",只有出问题了才补救(比如服务器过载了才扩容),依赖固定规则,面对AI系统的随机波动、数据漂移等"未知风险"完全没辙;
- 2.0时代(AI辅助系统):像"天气预报员+消防员",能提前预判部分风险,但还是被动应对,不会从每次适配中总结经验;
- 3.0时代(POLARIS目标):像"预言家+工程师团队",不仅能预判风险,还能自己优化应对策略,越用越聪明。
传统自适应系统的核心痛点很明显:① 只能"事后补救",无法主动预判;② 面对AI原生系统的不确定性(比如模型幻觉、参数漂移)束手无策;③ 适配策略固定,不会自我进化;④ 跨场景泛化差,换个系统就得重新设计规则。比如某电商平台的传统扩容系统,面对突发促销流量只能按固定阈值扩容,要么扩早了浪费资源,要么扩晚了导致卡顿,还没法从每次促销中学习优化。
正是这些痛点,催生了POLARIS的诞生------它要让自适应系统从"被动反应"变成"主动推理+自我进化"。
1. 一段话总结
POLARIS 是一款面向 Self-Adaptation 3.0 的多智能体推理驱动自适应框架,基于三层架构(低延迟 Adapter层 、透明 Reasoning层 、元学习 Meta层 ),通过多智能体协作、工具感知推理与元学习突破传统自适应系统的 reactive 局限,实现预测性、数据驱动的主动适配;在 SWIM 和 SWITCH 两个不同类型的示例系统中表现优异,SWIM 上总效用达 5445.48 超现有基线,SWITCH 中响应时间中位数降低 27.3% 、CPU 使用率降低 14.9% 、破坏性切换减少 87.1%,验证了其泛化性与高效性,推动自适应系统从"环境学习"向"推理与自我进化"跨越。
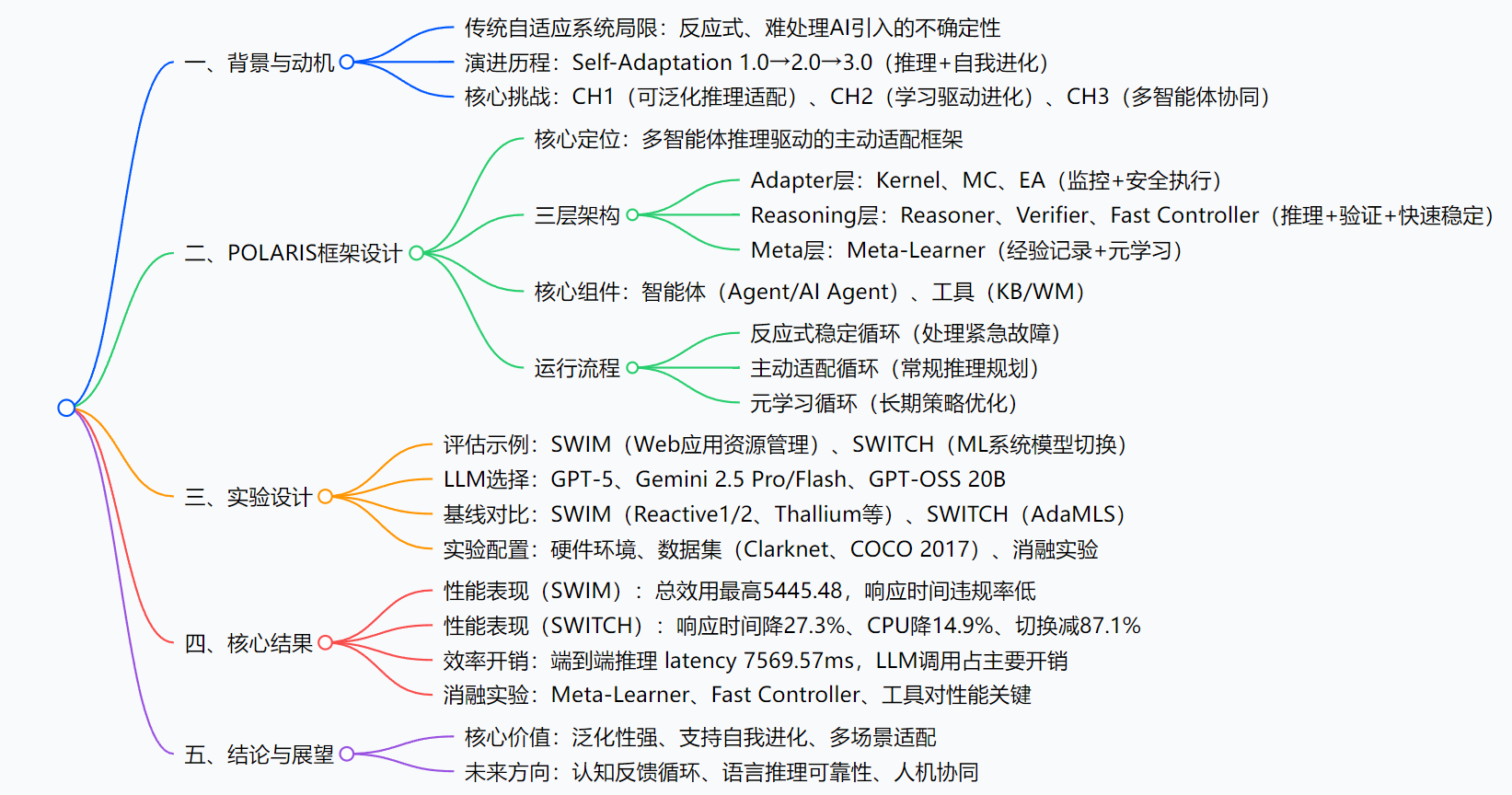
2. 思维导图(mindmap)
创新点
- 三层多智能体架构,分工明确且协同高效:突破传统单一控制循环的局限,将"监控执行、推理验证、自我进化"拆分为三层,每个层级由专门智能体负责,既保证低延迟响应,又能实现长期策略优化,像"作战小队"一样各司其职又协同作战。
- 工具感知的透明推理,告别"黑箱决策":推理层(Reasoner)结合知识库(KB,存历史经验)和世界模型(WM,做"假设分析"),用自然语言推理替代复杂数学建模,决策过程可解释,还能灵活调用工具验证方案,解决了LLM推理"幻觉"和上下文丢失的问题。
- 元学习驱动自我进化,系统越用越聪明:元学习层(Meta-Learner)会记录每次适配的"上下文-决策-结果",定期分析优化策略(比如调整风险阈值、优化推理逻辑),让系统从"适应环境"升级为"适应自身的适配行为",真正实现Self-Adaptation 3.0。
- 跨场景强泛化,无需重复开发:不管是传统Web应用(SWIM)还是现代AI模型系统(SWITCH),只需简单配置适配器和提示模板,就能直接部署,解决了传统系统"一套方案只能用一个场景"的痛点。
研究方法和思路
POLARIS的设计思路很清晰:用"分层协同"解决"响应速度"和"推理深度"的矛盾,用"多智能体+工具"解决"泛化性"和"可靠性"的矛盾,用"元学习"解决"自进化"的问题。具体拆解为4步:
第一步:搭建核心架构(三层+多智能体)
- 适配层(Adapter):系统的"手脚"------Metric Collector(MC)实时收集性能数据(比如响应时间、CPU使用率),Kernel(内核)像"指挥官"分流任务,Execution Adapter(EA)把抽象指令变成实际操作(比如"扩容服务器""切换AI模型");
- 推理层(Reasoning):系统的"大脑"------Reasoner(推理师)用LLM做策略规划,Verifier(检察官)验证方案是否安全(比如不能超过最大服务器数),Fast Controller(急救员)应对紧急情况(比如响应时间骤升,立刻降低处理保真度);
- 元学习层(Meta):系统的"灵魂"------Meta-Learner(总结者)分析历史适配数据,优化策略(比如把服务器危险利用率从90%下调到80%,提前规避风险)。
第二步:设计三大运行循环(应对不同场景)
- 反应式稳定循环(紧急情况):MC检测到指标突破临界值(比如响应时间>750ms)→Kernel调用Fast Controller→执行预定义规则快速稳定系统→Verifier验证→EA执行;
- 主动适配循环(常规情况):Kernel定期调用Reasoner→Reasoner通过KB查历史数据、WM做模拟预测→生成适配方案→Verifier验证→EA执行;
- 元学习循环(长期优化):记录每次适配的"上下文-决策-结果"→Meta-Learner定期分析→更新推理规则/阈值→让系统持续进化。
第三步:实验验证(双重示例+多维度测试)
- 选两个差异极大的系统做测试:① SWIM(传统Web应用,适配方式是服务器扩缩容+调整处理保真度);② SWITCH(AI系统,适配方式是动态切换目标检测模型);
- 技术选型:推理层用GPT-5、Gemini、开源LLM(覆盖不同性能/成本需求),元学习层用轻量LLM保证效率;
- 对比测试:和Reactive1/2、Cobra、AdaMLS等主流基线比性能,用消融实验(去掉元学习层/工具/快速控制器)验证组件必要性。
第四步:效率优化(控制开销)
- 核心开销来自LLM调用(约3秒),但主动适配循环是固定间隔运行,对系统整体响应影响极小;
- KB查询、WM模拟等辅助操作开销仅毫秒级,几乎可以忽略。
主要成果和贡献
核心成果总结表
| 研究问题(RQ) | 实验方式 | 关键结论 |
|---|---|---|
| RQ1:POLARIS的泛化性和有效性如何? | 对比SWIM/SWITCH与传统基线,消融实验 | 1. SWIM总效用5445.48(超Cobra等基线);2. SWITCH响应时间降27.3%、CPU降14.9%、切换减87.1%;3. 去掉元学习层/快速控制器性能暴跌 |
| RQ2:POLARIS的效率和开销如何? | 测试端到端推理延迟、组件开销 | 1. 主动适配循环延迟约7.6秒(可控);2. LLM调用是主要开销,其余组件开销可忽略;3. 开源LLM也能达到相近性能 |
用大白话讲成果价值
- 性能碾压传统方案:在Web应用场景(SWIM)中,POLARIS的"总效用"(综合稳定性+资源利用率)达到5445.48,超过了Cobra、PLA等主流基线;在AI模型切换场景(SWITCH)中,不仅响应速度更快,还减少了87.1%的"破坏性切换"(避免模型频繁切换导致的误差)。
- 一次开发,多场景复用:不管是传统服务器扩容,还是AI模型动态切换,POLARIS不用重写核心逻辑,只需简单配置适配器,解决了传统系统"量身定制"的麻烦。
- 系统越用越聪明:元学习层让系统能从每次适配中学习,比如发现"服务器利用率达80%就容易过载",会自动下调预警阈值,提前扩容,避免卡顿。
- 兼顾可靠性和灵活性:既用Fast Controller保证紧急情况的低延迟响应,又用LLM推理应对复杂场景,还通过Verifier避免决策失误,解决了"快"和"准"的矛盾。
开源资源
3. 详细总结
一、研究背景与核心动机
- 传统自适应系统的局限:依赖规则驱动或孤立学习组件,仅能处理可预测不确定性,难以应对AI原生系统中的数据漂移、随机模型等"未知未知",且多为反应式适配,无法从自身适配行为中学习。
- 演进愿景 :从 Self-Adaptation 1.0(传统反馈循环)、2.0(AI辅助控制),迈向 Self-Adaptation 3.0------以推理、学习、协同为核心,实现"适配行为自身可进化"的主动适配。
- 核心挑战 :
- CH1:融合语言推理、反思学习与预测建模,实现不确定环境下的可泛化推理适配;
- CH2:通过元学习捕获经验知识,持续优化适配策略;
- CH3:多智能体协同,实现分布式且全局一致的适配。
二、POLARIS框架核心设计
1. 基础概念定义
| 概念 | 定义 |
|---|---|
| Agent | 自主运行于环境、追求特定目标的计算实体 |
| AI Agent | 具备推理、学习能力的Agent,以AI模型为"认知核心",可解释、自适应 |
| Tool | 非自主软件工件(如KB、WM),支持Agent感知、推理,无独立目标 |
2. 三层架构与核心组件
| 层级 | 核心组件 | 主要职责 |
|---|---|---|
| Adapter层 | Kernel(内核) | 中央协调器,分流系统状态至对应适配循环 |
| Metric Collector(MC) | 收集系统原始/衍生性能指标 | |
| Execution Adapter(EA) | 将抽象适配指令转换为领域特定可执行操作 | |
| Reasoning层 | Reasoner(推理器) | AI驱动智能体,通过KB/WM工具进行证据驱动的策略规划 |
| Verifier(验证器) | 安全兜底,验证计划是否符合运行不变量 | |
| Fast Controller(FC) | 低延迟预定义策略,危机时快速稳定系统 | |
| 工具(KB/WM) | KB:存储历史经验/模式;WM:提供"假设分析"预测模型 | |
| Meta-Learner层 | Meta-Learner(元学习器) | 分析长期适配历史,识别次优模式,进化系统策略(更新阈值、提示模板等) |
3. 三大运行循环
- 反应式稳定循环(Reactive Stabilization) :
- 触发条件:MC收集的指标突破临界阈值(如响应时间>750ms);
- 流程:Kernel→Fast Controller执行预定义规则→Verifier验证→EA执行,快速恢复系统至安全状态。
- 主动适配循环(Proactive Adaptation) :
- 触发条件:系统无紧急故障(默认运行);
- 流程:Kernel→Reasoner接收目标/约束/工具接口→通过KB查询历史数据+WM模拟预测→生成适配计划→Verifier验证→EA执行。
- 元学习循环(Meta-Learning) :
- 流程:记录每次适配的"上下文-决策-结果"经验元组→Meta-Learner定期分析经验→优化策略(如调整服务器危险利用率阈值从0.90至0.80)→更新Reasoner/ Kernel/WM配置。
三、实验设计细节
- 评估示例 :
- SWIM:Web应用模拟器,适配方式为服务器扩缩容、调整请求处理保真度(dimmer控制);
- SWITCH:ML驱动系统,适配方式为动态切换目标检测模型(平衡延迟与精度)。
- 实验配置 :
- LLM选择:Reasoner(GPT-5、Gemini 2.5 Pro/Flash、GPT-OSS 20B)、Meta-Learner(Gemini 2.0 Flash);
- 硬件:SWIM(16GB RAM、4.7GHz i7)、SWITCH(24GB RAM、4.8GHz Ultra 7),本地LLM依赖NVIDIA A6000 GPU;
- 数据集:SWIM(Clarknet Web轨迹)、SWITCH(COCO 2017 500张随机图像);
- 基线对比:SWIM(Reactive1/2、Thallium、PLA-SDP等)、SWITCH(AdaMLS);
- 消融实验:测试"无Meta-Learner(-M)""无工具(-Tools)""无Fast Controller(-F)"等变体性能。
四、核心实验结果
1. 性能对比(SWIM示例)
| 方法 | 可选内容占比(%) | 延迟违规率(%) | 平均服务器数 | 总效用 |
|---|---|---|---|---|
| 基线(Reactive1) | 91.07 | 28.78 | 2.45 | 2647.48 |
| 基线(Cobra) | 89.00 | 3.30 | 3.00 | 5378.00 |
| POLARIS(GPT-5,全配置) | 95.08 | 6.24 | 2.82 | 5445.48 |
| POLARIS(Gemini Flash) | 94.40 | 6.00 | 2.70 | 5294.00 |
2. 性能对比(SWITCH示例)
| 方法 | 平均置信度 | 响应时间中位数(s) | CPU使用率(%) | 推理速率/切换次数(inf/min) |
|---|---|---|---|---|
| AdaMLS | 0.729 | 0.132 | 56.85 | 212.78/865 |
| POLARIS | 0.688 | 0.096 | 48.36 | 244.19/112 |
3. 效率与开销
| 开销类型 | 平均延迟(ms) |
|---|---|
| 端到端推理(主动适配) | 7569.57 |
| Gemini LLM调用 | 3048.31 |
| World Model操作 | 11.84 |
| LLM工具调用开销 | 5.23 |
| Knowledge Base查询 | 2.85 |
4. 关键结论
- 泛化性:在传统Web应用(SWIM)和现代ML系统(SWITCH)中均优于基线;
- 稳定性:不同LLM后端(GPT-5、Gemini等)性能一致,架构设计缓解LLM不确定性;
- 组件必要性:消融实验显示,移除Meta-Learner或Fast Controller会导致延迟违规率翻倍、总效用下降超1000。
五、讨论与展望
- 核心贡献:解决CH1(语言推理实现泛化适配)、CH2(元学习驱动自我进化)、CH3(多智能体协同平衡长短目标);
- 应用价值:仅需定义适配器和提示模板即可集成,支持人机协同与工具扩展;
- 未来方向:设计认知反馈循环、语言推理可靠性保障、优化人机协同模式。
六、威胁与局限
- 内部有效性:依赖模拟环境,未完全覆盖真实世界复杂度;
- 构造有效性:提示设计依赖开发者,工具集成需明确调用规则;
- 外部有效性:KB当前为内存存储,WM模型依赖具体实现。
4. 关键问题
问题1:POLARIS框架的核心创新的是什么?与传统自适应系统的核心区别在哪里?
答案 :核心创新在于构建了 多智能体推理驱动的三层架构 与 Self-Adaptation 3.0范式,实现"适配行为自身可进化"。与传统系统的区别:① 传统系统为反应式适配(依赖预定义规则/孤立学习),POLARIS通过Reasoning层的工具感知推理(KB+WM)实现主动预测性适配;② 传统系统无法从适配经验中自我优化,POLARIS的Meta层通过元学习持续更新策略(如调整阈值、优化推理逻辑);③ 传统系统难以应对分布式协同与AI引入的不确定性,POLARIS通过多智能体(Reasoner/Verifier/Meta-Learner)协同,平衡短期稳定与长期优化,缓解LLM幻觉等问题。
问题2:POLARIS在关键性能指标上如何超越现有基线?请结合两个示例系统的核心数据说明。
答案 :在两个不同类型的示例系统中,POLARIS在效用、效率、稳定性指标上均显著优于基线:① SWIM(Web应用):总效用达 5445.48 ,超越最优基线Cobra(5378.00),同时保持89.14%-95.08%的高可选内容占比,延迟违规率仅4.86%-6.24%,低于传统Reactive1的28.78%;② SWITCH(ML系统):响应时间中位数降低 27.3% (从0.132s降至0.096s),CPU使用率降低 14.9% (从56.85%降至48.36%),破坏性切换减少 87.1%(从865次降至112次),推理速率提升14.7%(从212.78 inf/min升至244.19 inf/min),在精度损失可控(置信度从0.729降至0.688)的前提下实现效率大幅提升。
问题3:POLARIS的运行效率如何?主要开销来源是什么?这种开销是否会影响其实际应用价值?
答案 :① 运行效率:主动适配循环的端到端推理平均延迟为 7569.57ms(约7.6秒),其中LLM调用是主要开销(Gemini平均3048.31ms),而KB查询(2.85ms)、WM操作(11.84ms)等组件开销可忽略;② 开销合理性:该延迟为固定间隔运行的主动适配开销,对系统整体决策影响极小,且远低于服务器扩缩容等适配操作的固有延迟(如SWIM中服务器部署延迟60秒);③ 应用价值:开销与收益相比具备强性价比------POLARIS通过该开销实现了泛化性(无需针对不同系统重设计)、自我进化(持续优化性能),且支持多种LLM后端(包括低成本开源模型GPT-OSS 20B),实际应用中可通过选择轻量LLM(如Gemini Flash)进一步降低延迟,因此不影响其落地价值。
总结
POLARIS 提出了一种全新的自适应系统设计范式,通过三层多智能体架构、工具感知推理和元学习,成功将自适应系统从"被动应对"推向"主动推理+自我进化"的3.0时代。它不仅解决了传统系统泛化性差、无法应对AI原生不确定性的痛点,还在不同类型的系统中实现了性能碾压,同时保持了低开销和高灵活性。对于需要应对动态环境的业务系统(如电商、AI服务、分布式架构),POLARIS提供了开箱即用的解决方案,也为后续自适应系统的研究指明了"多智能体推理+自进化"的核心方向。