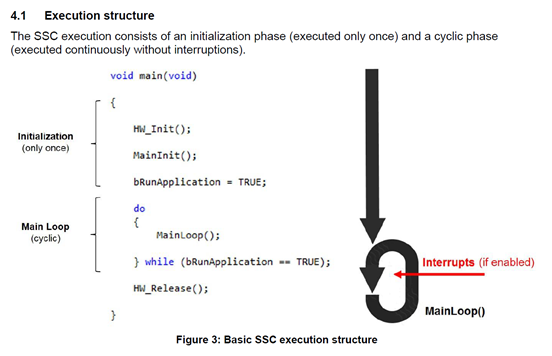
关于Ecat的代码,SSC TOOL的官方文件写的很好,详细讲解了Ecat的原理,代码架构,处理流程,CIA402的格式等,非常值得从头到尾看一遍学习。文件名是AN_ET9300_V1i10.pdf。(因为不确定是否需要版权才能使用,所以文档就不附上了)。
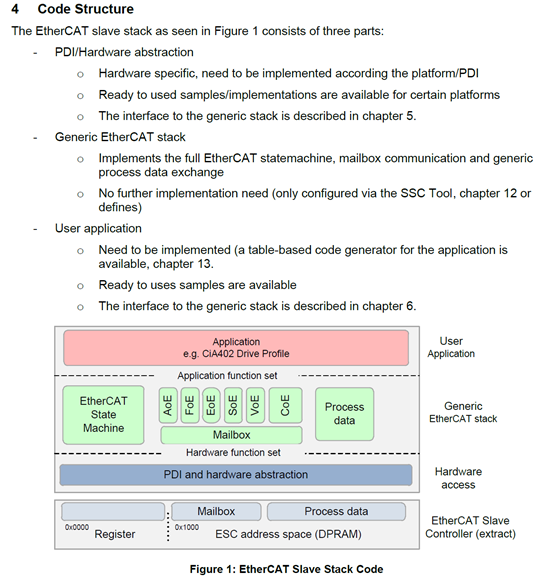
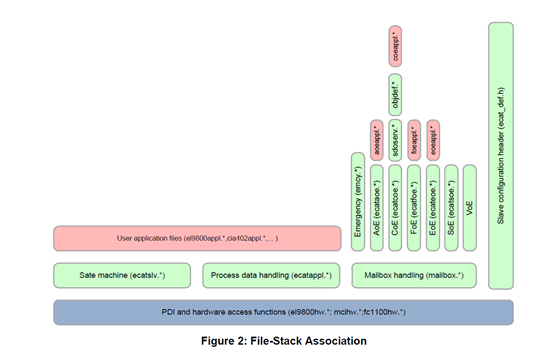
这里仅分析SSC TOOL生成的代码与用户自定义代码之间的交互部分,方便移植时弄清楚接口。
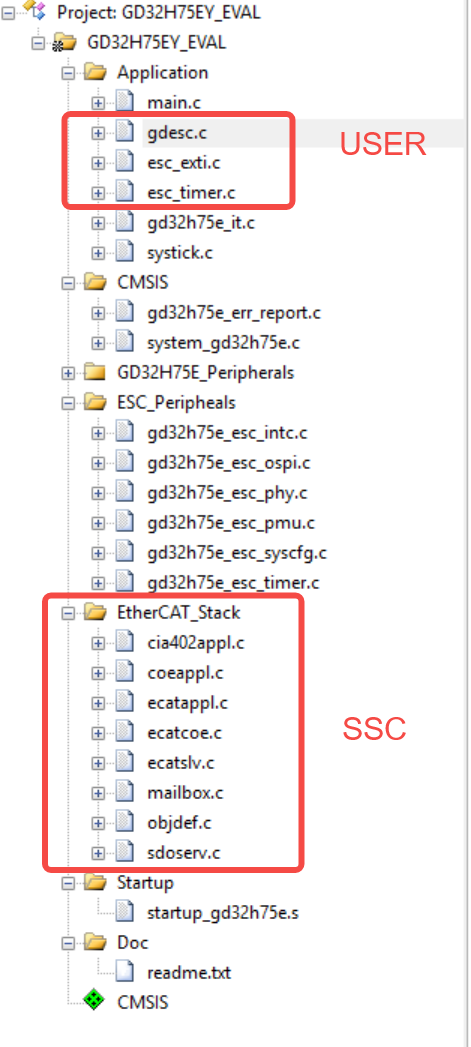
其中SSC为官方生产的代码,USER为用户适配SSC所做的接口。
这里以GD32H75E为例,代码可以在官网下载到。
在接口中,重点实现4个中断:
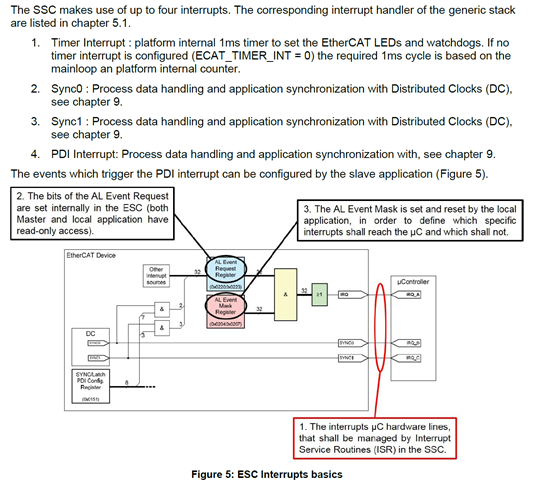
1、每1ms的周期处理Ecat状态的中断
/*!
\brief Timer 2 ISR (1ms) - Handles timer-based tasks for EtherCAT
\param[in] none
\param[out] none
\retval none
*/
void TimerIsr(void)
{
if(timer_interrupt_flag_get(TIMER2, TIMER_INT_FLAG_UP) != RESET) {
ECAT_CheckTimer();
ECAT_TIMER_ACK_INT;
}
}2、Ecat的中断,这是由AL_EVENT的8种类型中断触发的。在GD32H75E中,Ecat模块的IRQ引脚接到的PJ10上,因此是一个外部中断。
/*!
\brief interrupt service routine for the PDI interrupt from the EtherCAT Slave Controller
\param[in] none
\param[out] none
\retval none
*/
void EcatIsr(void)
{
if(exti_interrupt_flag_get(EXTI_10) != RESET) {
PDI_Isr();
ACK_ESC_INT;
}
/* interrupts from SYNC0 */
if(exti_interrupt_flag_get(EXTI_13) != RESET) {
Sync0_Isr();
ACK_SYNC0_INT;
}
}3、SYNC0同步信号0中断,这是使能了DC模式后才会有的。同样是外部中断输入。
void Sync0Isr(void)
{
}4、SYNC1的同步信号1中断,这是使能了DC模式后才会有的。同样是外部中断输入。
/*!
\brief interrupt service routine for the interrupts from SYNC1
\param[in] none
\param[out] none
\retval none
*/
void Sync1Isr(void)
{
if(exti_interrupt_flag_get(EXTI_3) != RESET) {
Sync1_Isr();
ACK_SYNC1_INT;
}
}其余为SSC规定的用户需要实现的接口,这在AN_ET9300_V1i10.pdf都有介绍。
这里补充说明下,GD32H75E的ESC采用核封的方式,挂在OPSI1上面,也就是说获取ESC的数据要通过OSPI1读写操作,因此在代码实现上与其他挂在总线上的方案不同。
更多知识分享:
b站,知乎同名:沧海一条狗
咸鱼ID:tb764914262