ROS neotic ubuntu20.04
1、安装FAST_LIO_Localization(重定位)
原版FAST_LIO_Localization采用python2.7,不是很适用与我默认的3.8环境,这里为避免麻烦,用一个博主修改版的:
原版FAST_LIO_Localization gtihub链接
修改版的github链接
修改版作者的博文
1.1、按照修改版的进行安装:
bash
# 依赖安装
sudo apt install ros-$ROS_DISTRO-ros-numpy
pip install numpy==1.21 # 如果后面运行重定位包看不见实时点云,可能是这里安装出错
pip install open3d==0.13
# 安装这里记得要用git submodule update --init来导入ikdtree模块,不然会报下面错误
bash
CMake Error at FAST_LIO/CMakeLists.txt:87 (add_executable):
Cannot find source file:
include/ikd-Tree/ikd_Tree.cpp
Tried extensions .c .C .c++ .cc .cpp .cxx .cu .m .M .mm .h .hh .h++ .hm
.hpp .hxx .in .txx
CMake Error at FAST_LIO/CMakeLists.txt:87 (add_executable):
No SOURCES given to target: fastlio_mapping
CMake Generate step failed. Build files cannot be regenerated correctly.
Invoking "cmake" failed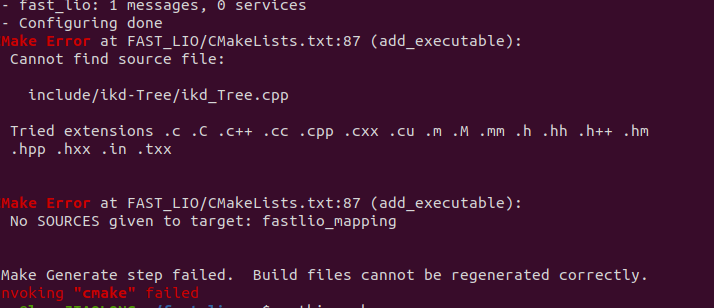
1.2 测试
这里我就用的Sample Dataset中的点云
bash
roslaunch fast_lio_localization localization_avia.launch map:=/path/to/your/map.pcd
rosbag play localization_test_scene_1.bag
# 给定初始位置
rosrun fast_lio_localization publish_initial_pose.py 14.5 -7.5 0 -0.25 0 0 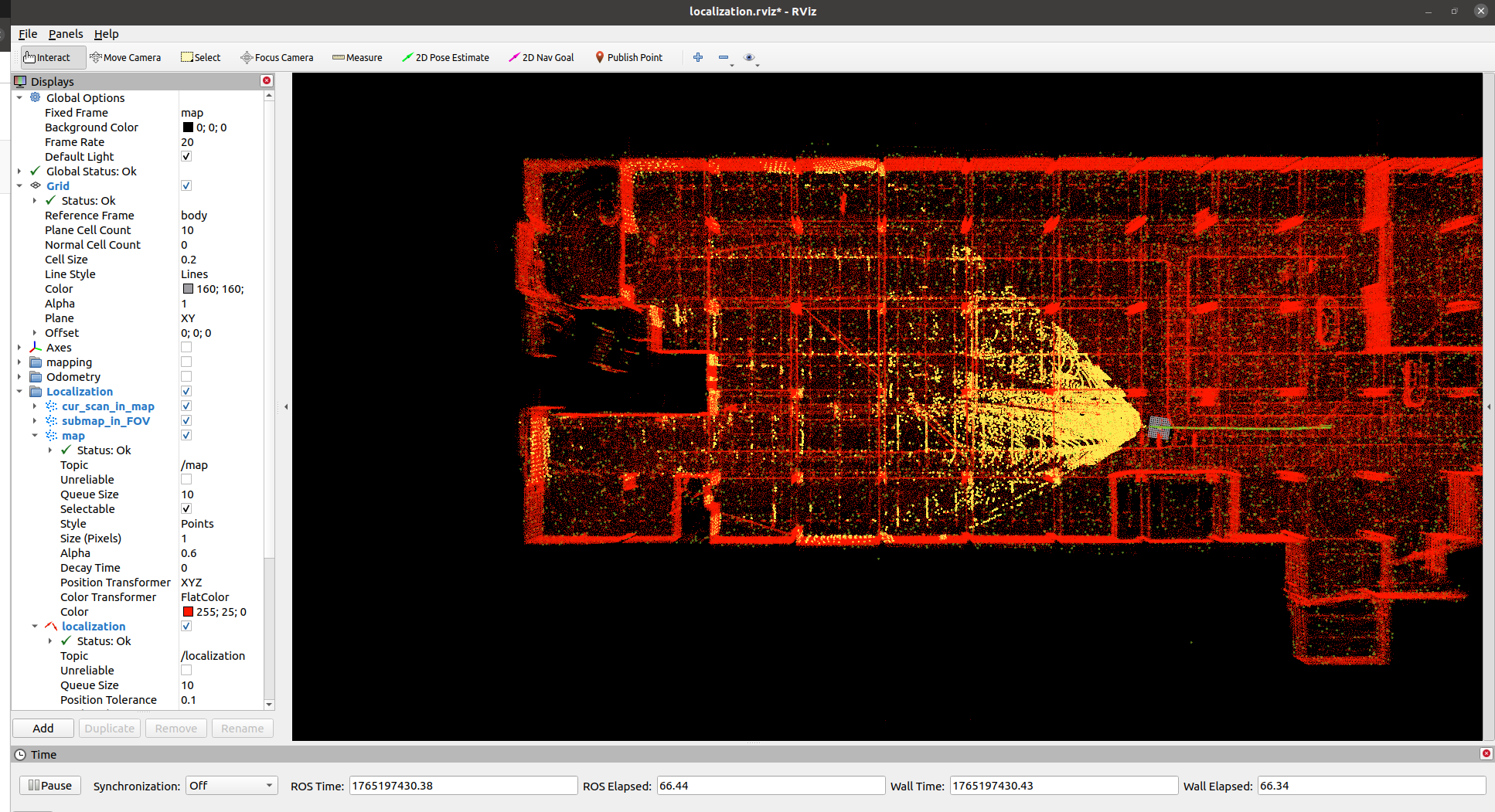
2、安装FAST_LIO(建图)
FAST_LIO 建图程序我是直接下载的源码,如果想和FAST_LIO_Localization放在一个工作空间,只要改下CMakeLists.txt文件中的变量名,以避免就行
1、修改CMakeLists.txt文件最后三行中的fastlio_mapping 为其他,如fastlio_mapping1
bash
add_executable(fastlio_mapping1 src/laserMapping.cpp include/ikd-Tree/ikd_Tree.cpp src/preprocess.cpp)
target_link_libraries(fastlio_mapping1 ${catkin_LIBRARIES} ${PCL_LIBRARIES} ${PYTHON_LIBRARIES})
target_include_directories(fastlio_mapping1 PRIVATE ${PYTHON_INCLUDE_DIRS})2、将FAST_LIO对应的launch文件中的fastlio_mapping也改成fastlio_mapping1,之后就可以开始建图了
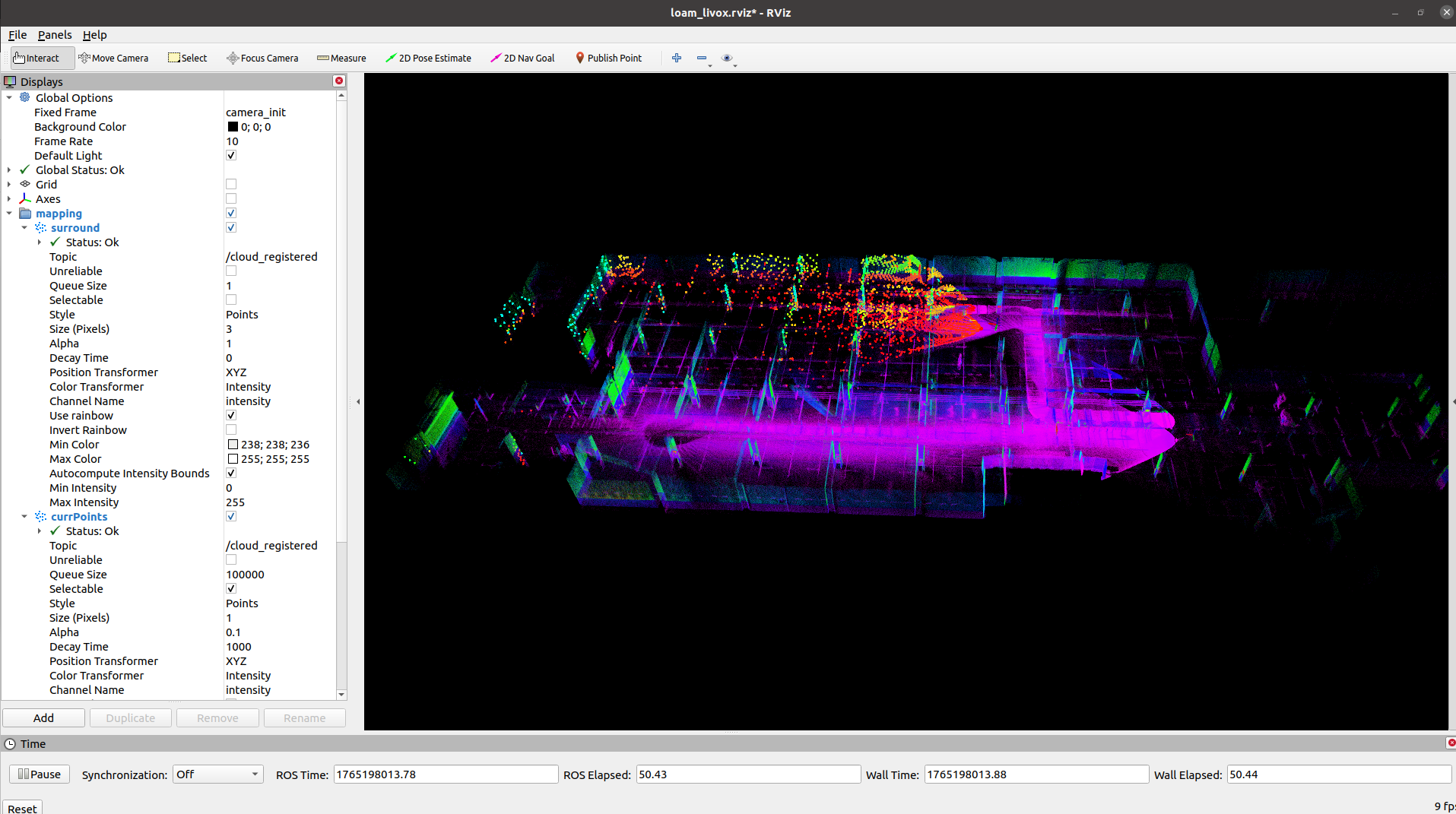
bash
roslaunch fast_lio mapping_mid360.launch3、建图效果