方法一
之前在Jetson上运行ROS1时便遇到过该问题,当时我的解决方法是,配置 conda 虚拟环境为默认 python 环境
以创建的 py38 为例:
- 将相关 ROS 程序第一行的环境路径更改为 conda 虚拟环境的路径,仅对当前程序有效。
bash
#!/home/your_username/miniconda3/envs/py38/bin/python3- 添加 conda 虚拟环境的环境变量到 .bashrc 文件中,对所有程序有效,且不受程序第一行环境路径影响。
bash
# 末尾插入以下内容并保存,替换 your_username 为用户名
export PYTHONPATH=/home/your_username/miniconda3/envs/py38/lib/python3.8/site-packages:$PYTHONPATH
bash
source ~/.bashrc详见: Jetson全流程笔记转载与集合 第12部分
方法二
我的平台和编程语言:Ubuntu22.04,conda虚拟环境,ROS2,Python
采用方法一,现在存在两个问题:
- 将conda的虚拟环境配置为默认python环境,导致我在运行uv虚拟环境时报错,且指向conda环境,具体原因我还没搞明白。
- 如果我不将conda的虚拟环境配置为默认python环境,那么ROS2编译后将从系统python环境运行,而我的系统环境没有安装任何依赖包,导致无法运行。
因此需要在conda虚拟环境中编译和运行ROS2,步骤如下:
- 在虚拟环境中安装相关的依赖包和ROS2编译工具
bash
# ROS2 Python包
pip install catkin_pkg empy ifcfg lark lark-parser netifaces
# ROS2 编译工具
pip install colcon-common-extensions- 在激活的虚拟环境中编译,如下所示:
bash
zb@zb-pc:~$ conda activate mujoco
(mujoco) zb@zb-pc:~$ cd sauv_ws
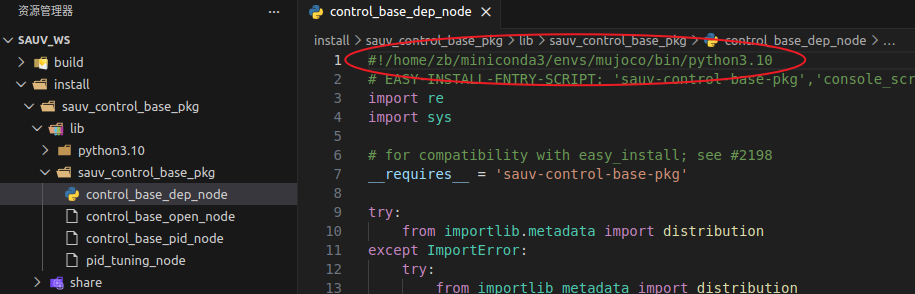
(mujoco) zb@zb-pc:~/sauv_ws$ colcon build --symlink-install- 检查和运行
编译之后,检查install文件夹下的内容,节点第一行将指向为conda虚拟环境,此时节点将在conda虚拟环境下运行。
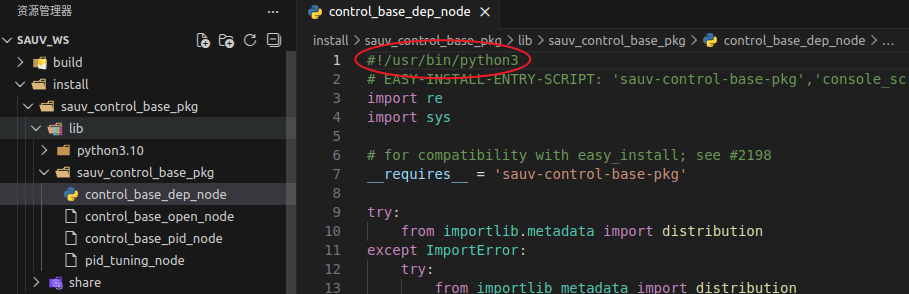
- 作为对比,以下展示非虚拟环境编译结果
bash
(mujoco) zb@zb-pc:~/sauv_ws$ conda deactivate
zb@zb-pc:~/sauv_ws$ colcon build --symlink-install