psp栈指针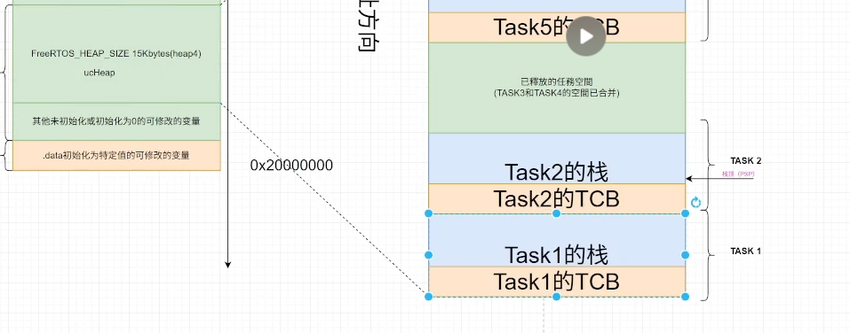
-
在.bss段分配了FREERTOS的栈堆空间(在系统里面uc heap数组大小)大小
-
所有创建的任务 如任务一的栈和tcb也在里面,还有队列等也会创建在里面
-
在操作栈的时候就用到了我们的psp指针
二、任务调度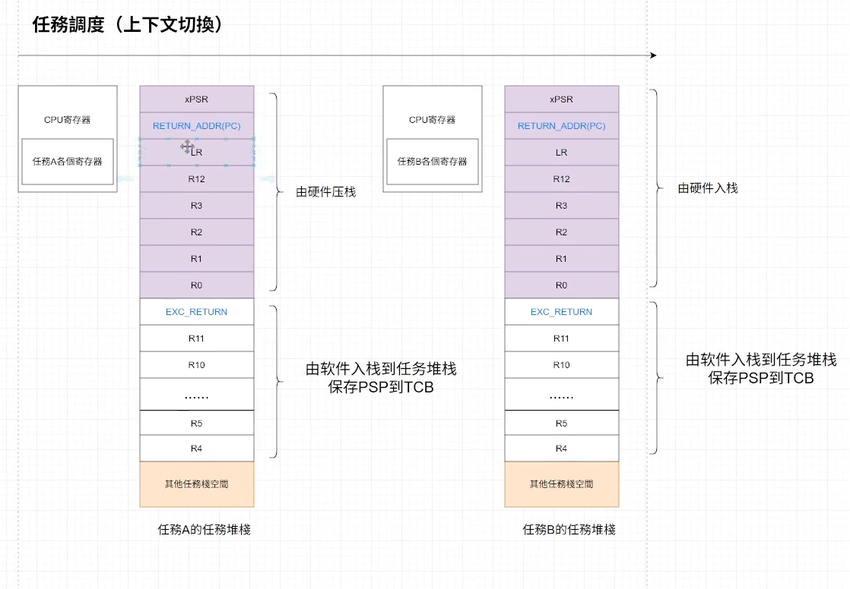
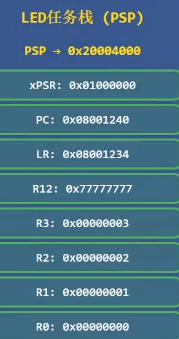
注意LR->R0都是硬件压栈 而其他的是软件压栈
(此处是M3权威指南的话)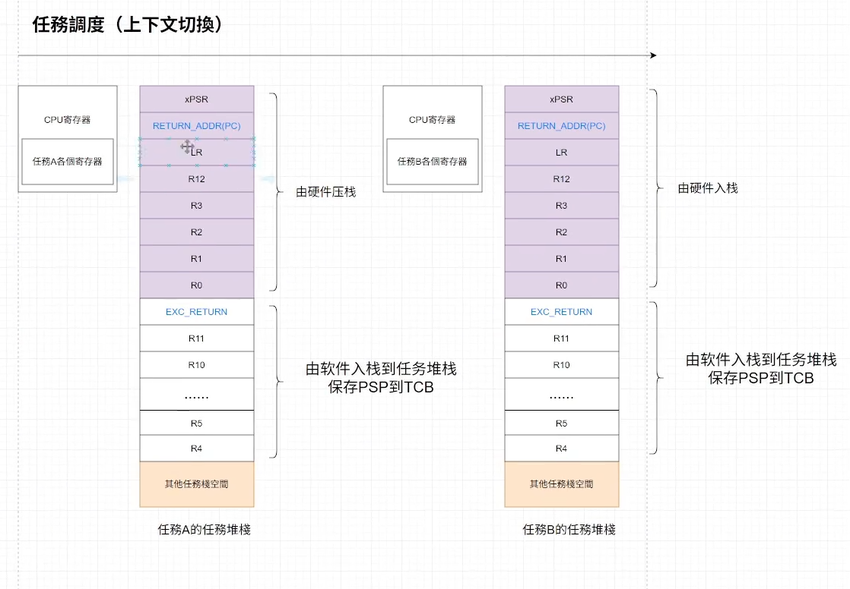
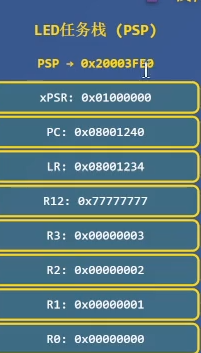
也就是说假设task2 被切换任务的时候,会把当前寄存器压进task2自己的栈 而psp栈指针便前往task5的栈开始
三、启动流程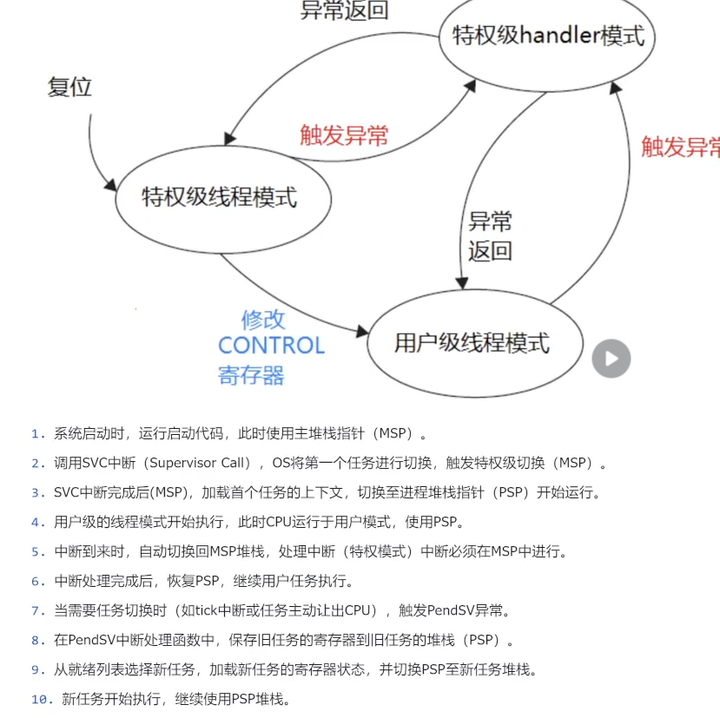
-
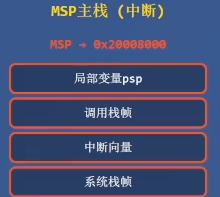
任何时候,处理中断的时候,一定会切回MSP(主堆栈指针)
-
而任务的切换是在pendsv里面的
四、切换任务过程
- 当在执行某个任务进行切换的时候,psp栈指针会向下移动(栈指针从高地址往低地址移动),此时发生硬件压栈(从r0->r3,r12,lr,pc,xpsr),压进当前psp所指向的栈里面
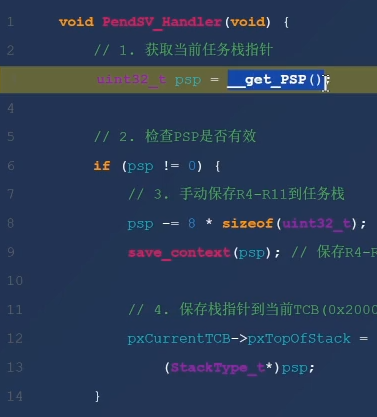
- 接着进入了pendsv中断函数里面,在上面有提及,在中断的时候,都是在msp栈里进行。
-
通过伪代码知道,现在获取了psp的指针 并存储在了局部变量psp(此时局部变量的值都是在主栈里)当中
-
-
接着检查psp指针是否有效,因为在刚上电的时候psp指针为0,如果有效的话 就会继续用软件压栈将R4-R11进行压栈,psp继续往下走,也就是把当前在cpu寄存器里面的值全部保存好在当前的任务栈中
-
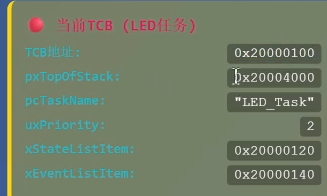
接着在保存完寄存器以后,找到当前任务的tcb地址,并把当前任务栈的指针地(PSP)址存到tcb第一个成员pxTOPOfStack保存起来,以方便后续回复任务进行弹栈
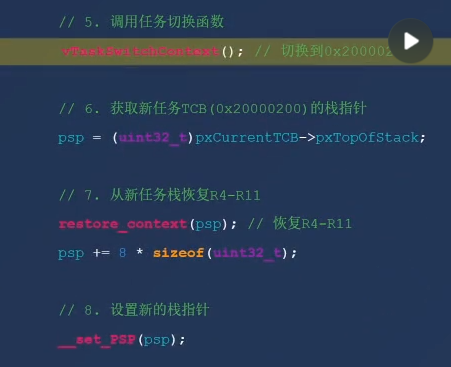
- 接着看pendsv代码,会进行上下文的切换
-
在调用了vTaskSwitchContext()这个函数之后,会更新pxCurrentTcb(全局变量)的值,也就是指向下一个就绪任务。
-
紧接着就是将psp继续赋值,从新的pxCurrentTcb指针取出,此任务的栈顶地址
-
接着就是消耗栈顶,也就是我们所谓的弹栈,回复r4-r11的寄存器(软件压栈,软件弹栈),剩下的硬件经行回复
-
最后更新psp(之前的都是局部变量psp)的值