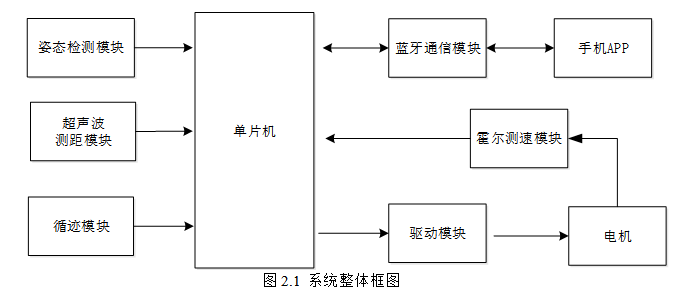
本次两轮自平衡循迹小车设计在功能上具有循迹、避障、蓝牙遥控、两轮自平衡等多种功能 ,小车的核心控制系统采用STM32F103单片机作为主控制器,为整个系统提供高效而稳定的运算能力,搭配MPU6050姿态传感器,实时监测小车的姿态变化,确保对其当前状态的准确感知,这一整合设计使得小车具备自动平衡的基础能力,为了实现对两轮小车的精准控制,引入了TB6612电机驱动电路,提供了强大的电机驱动能力,通过对两个轮子的差速控制,实现前进、后退、左转、右转等多方向运动,能够满足小车各种运动状态下的电机控制需求,为了更精准地监测小车的速度,引入了A3144霍尔传感器。通过该传感器,能够实时测量车轮的旋转速度,从而获得小车的实时速度信息,这种实时反馈系统有助于更加灵活地控制小车的运动,提高其对环境变化的适应性。并通过HC-SR04超声波模块实现测距功能,红外模块实现循迹功能,HC-06蓝牙模块实现与手机APP的通信,方便可以实现手机遥控功能。系统架构如图2.1所示。