基于人工势场的机器人绕障碍路径规划 文件列表: GradientBasedPlanner.m PotentialFieldScript.m evaluate_v2.p submit.m
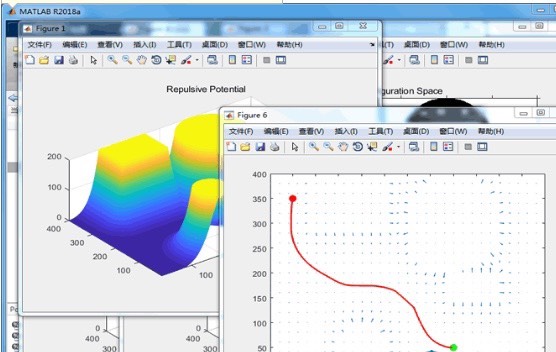
人工势场法这玩意儿在机器人路径规划里算是经典操作了。今天咱们直接扒开代码看看怎么用MATLAB实现机器人绕障,重点说说那些让小白头秃的实现细节。先甩个场景:红色是障碍物,绿色是目标点,机器人得从蓝色三角位置麻溜儿地绕过去。
先看PotentialFieldScript.m里的核心逻辑。引力场计算简单粗暴,就是朝着目标点怼个吸引力。代码里写着:
matlab
% 引力计算
attractive = alpha * (goal - current_pos);alpha这个参数你要是手滑设大了,机器人直接百米冲刺怼障碍物脸上。不过真正的坑在斥力场------障碍物周围得造个"安全气囊"对吧?来看这段:
matlab
% 斥力计算
for k = 1:size(obstacles,2)
dist = norm(current_pos - obstacles(:,k));
if dist < beta
repulsive = repulsive + gamma*(1/dist - 1/beta)*(1/dist^3)*(current_pos - obstacles(:,k));
end
endbeta是斥力作用范围,gamma控制斥力强度。这里有个隐藏bug:当机器人离障碍物太近时,dist趋近于零会导致数值爆炸。实战中得加个最小值保护,比如dist = max(dist, 0.1)。
梯度下降的实现才是重头戏,打开GradientBasedPlanner.m,这个while循环是关键:
matlab
while iter < max_iters
[grad_x, grad_y] = computeGradient(...);
next_pos = current_pos - step_size * [grad_x, grad_y];
if norm(next_pos - current_pos) < epsilon
break;
end
% 路径点存储
endstep_size选大了直接飞过目标点,选小了卡在半路。这里教个野路子:动态调整步长,离目标近的时候自动缩小步长,就像老司机踩刹车。
实测时会遇到经典问题------局部极小值。比如机器人卡在两个障碍物中间摆烂。这时候得使点阴招,代码里可以加个随机扰动:
matlab
if stuck_counter > 50
current_pos = current_pos + randn(2,1)*0.3;
stuck_counter = 0;
end当然这会让路径变得不那么优雅,但总比卡死强对吧?毕竟现实中的机器人也没规定必须走直线。
最后说个新手容易翻车的地方------势场参数调整。别信论文里的推荐值,自己拿着PotentialFieldScript.m里的滑块多调几次:alpha从0.5开始慢慢加,gamma先设个10试试,beta根据障碍物密度来。记住参数之间会互相影响,调参时准备好咖啡就完事了。