MOPSO-PID/多目标粒子群优化PID/Simulink多目标粒子群整定PID参数/MOPSO寻优多目标PID参数 传统粒子群整定PID参数的适应度目标只有一个(如ITAE指标),如果想综合考虑被控对象的超调、响应速度、误差等指标,就需要运用到多目标粒子群算法来权衡选择。 内容含1)MOPSO文件夹,适合先了解MOPSO算法;2)MOPSO-PID文件夹,将MOPSO运用到多目标PID参数整定中,选取了两个目标函数,并在结果选择中添加了三种限制条件,便于在非劣解集中选择最优解。 两个文件夹互相独立,可非开运行。 采用matlab编写代码和simulink搭建模型,代码含详细注释,附带一个说明文档。
在控制领域,PID控制器以其简单易用却又效果显著而广泛应用。然而,如何精准地整定PID参数,一直是工程师们需要攻克的难题。传统粒子群整定PID参数的方法,往往只聚焦于一个适应度目标,比如ITAE指标。但在实际工程里,我们常常希望能综合考量被控对象的超调、响应速度以及误差等多个重要指标,这时候,多目标粒子群算法(MOPSO)就闪亮登场了,它能够帮助我们在这些指标间进行权衡选择。
MOPSO算法初探
首先介绍一下MOPSO文件夹,这个文件夹是了解MOPSO算法的绝佳起点。MOPSO算法相较于传统粒子群算法,它不再局限于单一目标的优化,而是能够同时处理多个相互冲突的目标。
这里简单给大家看一段基础的粒子群算法代码(以单目标为例,方便理解原理):
matlab
% 初始化参数
pop_size = 50; % 种群大小
dim = 2; % 维度,对应PID的P、I、D参数
max_iter = 100; % 最大迭代次数
c1 = 1.5; % 学习因子1
c2 = 1.5; % 学习因子2
w = 0.9; % 惯性权重
w_damp = 0.99; % 惯性权重递减率
% 初始化粒子位置和速度
x = rand(pop_size, dim);
v = rand(pop_size, dim);
% 个体最优位置
pbest = x;
% 个体最优适应度
pbest_fitness = Inf(pop_size, 1);
% 全局最优位置
gbest = [];
% 全局最优适应度
gbest_fitness = Inf;
for iter = 1:max_iter
% 计算适应度
fitness = calculate_fitness(x);
% 更新个体最优
index = fitness < pbest_fitness;
pbest(index, :) = x(index, :);
pbest_fitness(index) = fitness(index);
% 更新全局最优
[min_fitness, min_index] = min(pbest_fitness);
if min_fitness < gbest_fitness
gbest_fitness = min_fitness;
gbest = pbest(min_index, :);
end
% 更新速度和位置
v = w * v + c1 * rand(pop_size, dim).*(pbest - x) + c2 * rand(pop_size, dim).*(repmat(gbest, pop_size, 1) - x);
x = x + v;
% 限制位置范围
x = max(0, min(1, x));
% 更新惯性权重
w = w * w_damp;
end这段代码实现了基本的粒子群算法流程。初始化粒子的位置和速度,在每次迭代中,通过比较当前适应度和个体最优适应度来更新个体最优位置,再从个体最优中找出全局最优。然后依据惯性权重、学习因子来更新粒子的速度和位置,并且限制粒子位置在一定范围内。MOPSO算法则是在此基础上,针对多目标情况进行了拓展。
MOPSO - PID:多目标PID参数整定实战
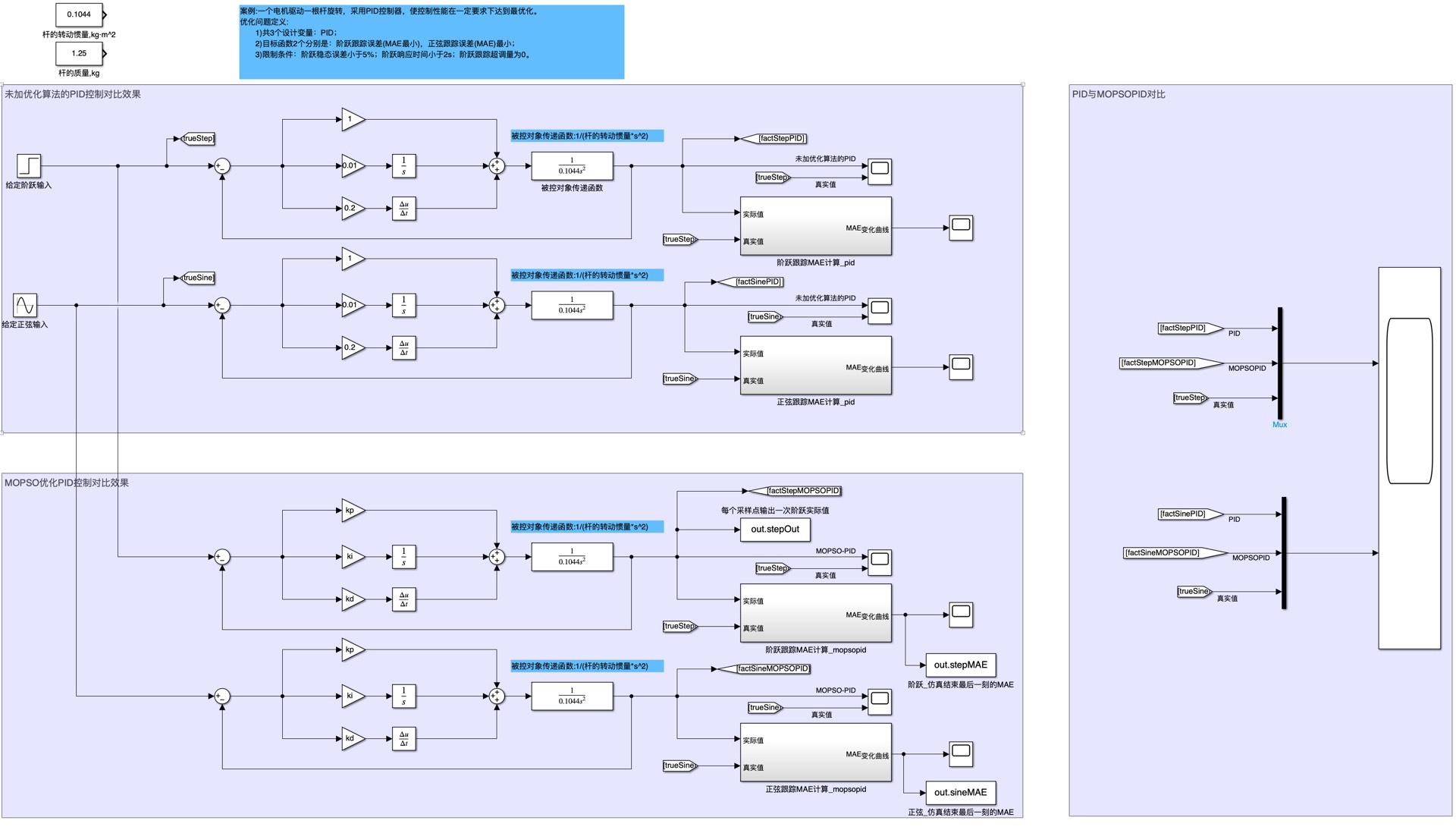
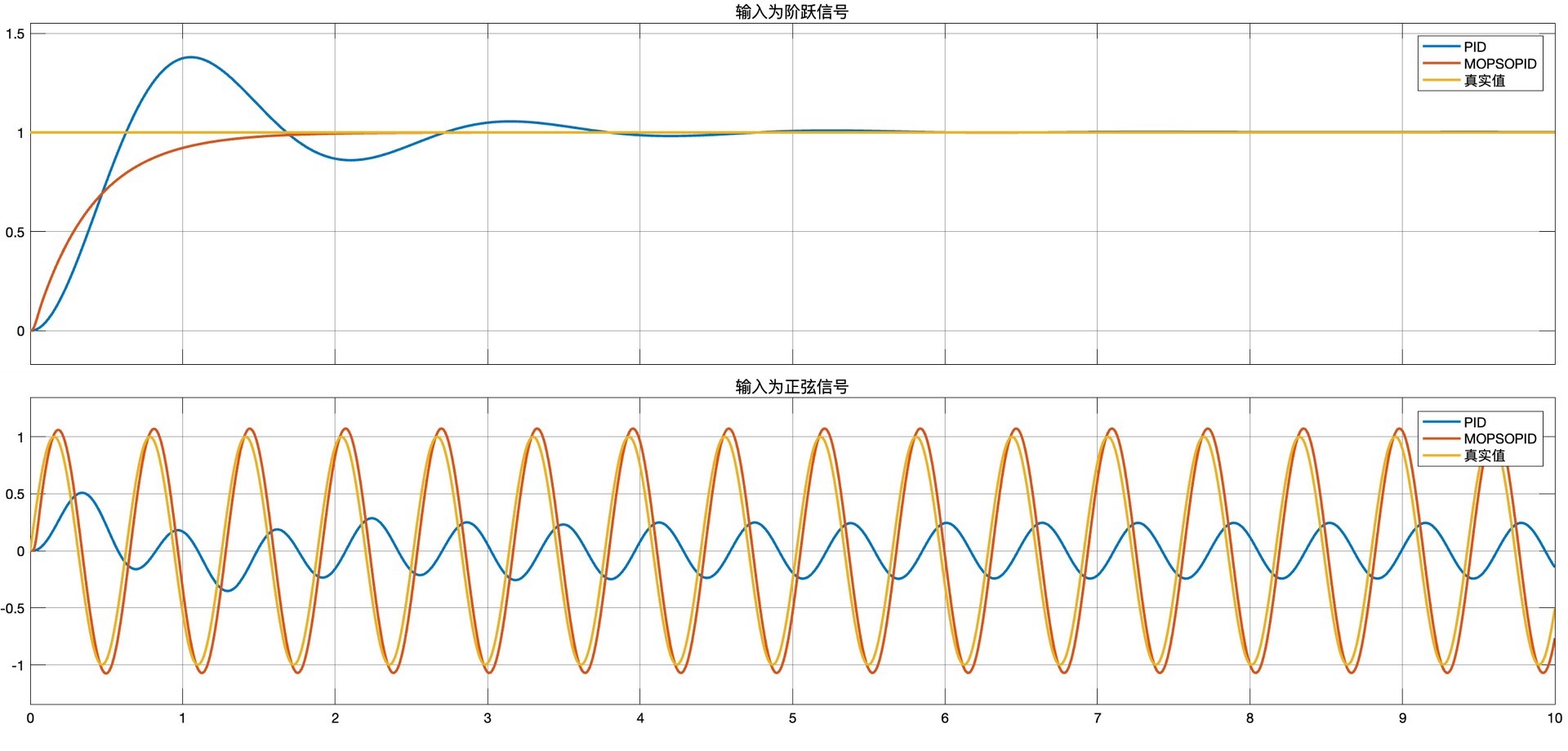
接下来看看MOPSO - PID文件夹,这里将MOPSO算法成功运用到了多目标PID参数整定中。在这个过程里,选取了两个目标函数,这两个目标函数分别从不同角度反映了系统性能,比如一个侧重于超调的控制,另一个则更关注响应速度。
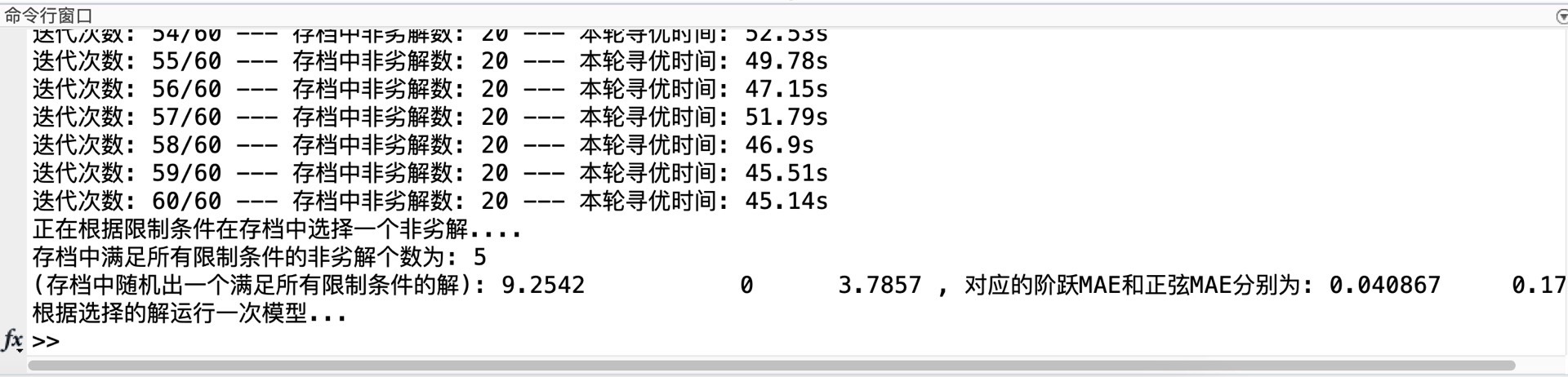
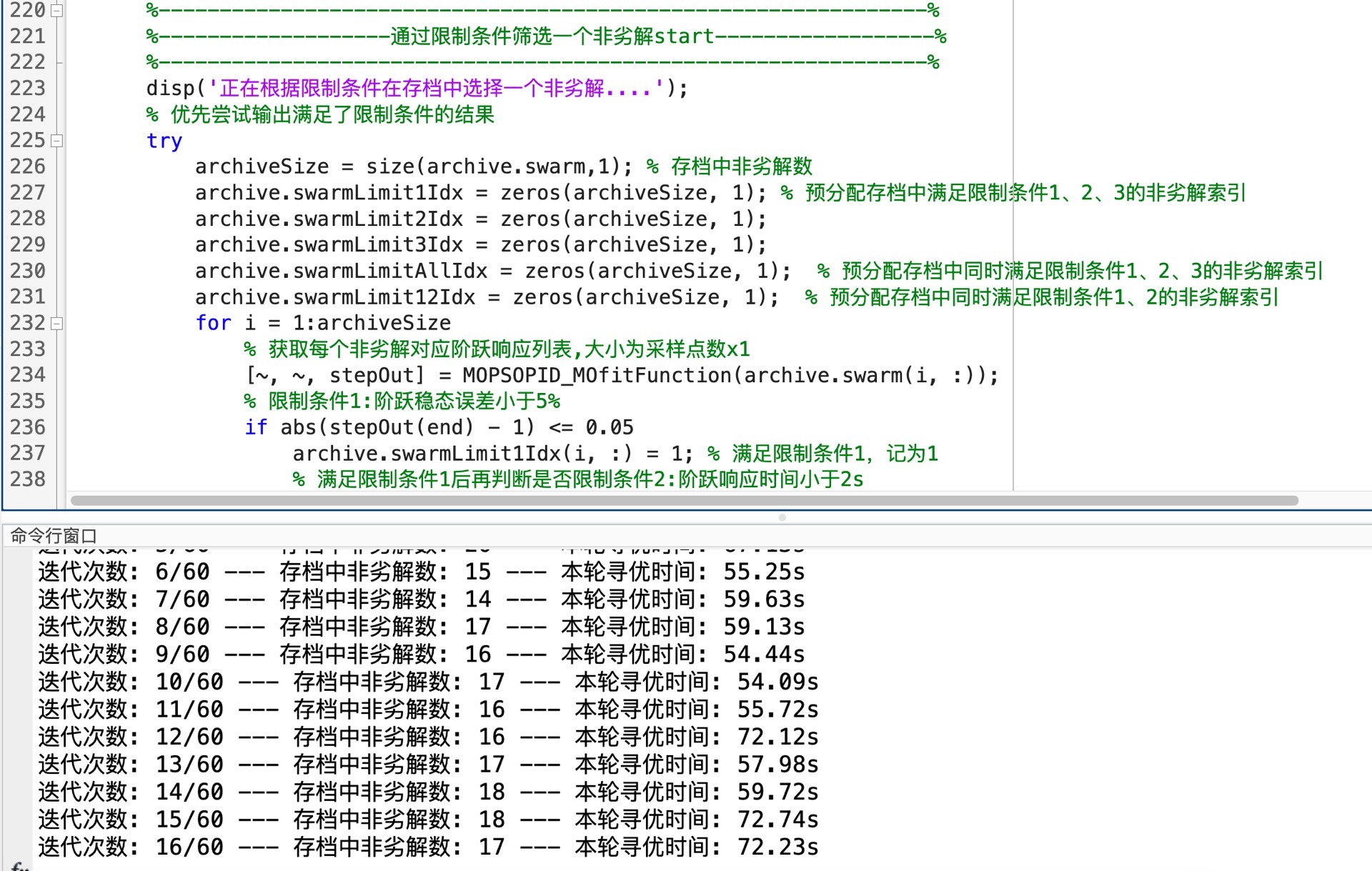
在结果选择方面,添加了三种限制条件,这极大地方便了我们在非劣解集中选择最优解。非劣解集是多目标优化中非常重要的概念,简单说就是这些解之间无法直接比较谁更优,因为它们在不同目标上各有优劣。而通过这三种限制条件,我们能从这个复杂的解集中挑选出最符合我们实际需求的解。
下面是MOPSO - PID的部分核心代码:
matlab
% 初始化MOPSO参数
pop_size = 50; % 种群大小
dim = 3; % PID参数维度
max_iter = 100; % 最大迭代次数
% 初始化粒子位置和速度
x = rand(pop_size, dim);
v = rand(pop_size, dim);
% 计算初始目标函数值
obj_values = calculate_obj_functions(x);
% 快速非支配排序
[rank, crowding_distance] = fast_non_dominated_sort(obj_values);
% 找到当前的非劣解集
non_dominated_set = find(rank == 1);这里初始化了MOPSO用于PID参数整定的相关参数,生成粒子的初始位置和速度后,计算每个粒子对应的目标函数值。然后通过快速非支配排序算法,确定每个粒子的等级以及拥挤距离,从而找出当前的非劣解集。
在Simulink中搭建与MOPSO - PID算法配套的模型也非常关键。通过将MOPSO优化得到的PID参数输入到Simulink搭建的被控对象模型中,就能直观地看到系统的响应情况。
整个项目采用Matlab编写代码,并且代码中包含了详细的注释,同时还附带一个说明文档。这对于想要深入了解算法原理以及如何应用的朋友来说,是非常友好的。就算你是初次接触MOPSO - PID,通过阅读代码注释和说明文档,也能较快上手。
这两个文件夹互相独立,可以分开运行。MOPSO文件夹帮助我们深入理解多目标粒子群算法的精髓,而MOPSO - PID文件夹则是将理论与实际应用相结合,实现了多目标PID参数的整定。希望大家能通过这个项目,对多目标优化以及PID参数整定有更深刻的认识,在实际工程应用中也能更加得心应手。